一种码垛机器人用抓手的制作方法
本技术属于物流仓储设备领域,具体涉及一种码垛机器人用抓手。
背景技术:
1、码垛机器人是机械与计算机程序有机结合的产物,为现代生产提供了更高的生产效率。在当今社会背景下,码垛机器人大大提高了社会生产力,节约劳动成本,作业高效灵活,被广泛的运用在工厂、码头等地方中。
2、中国专利cn2116859772u公开的一种码垛机器人用箱式抓手中,通过气缸、抓手本体、电机、主动齿轮、螺杆、从动齿轮、螺套、移动杆和支撑板的配合使用,在对箱体进行抓取时,控制两个抓手本体将箱体夹持并提起,然后可控制两个电机使两个支撑板相对移动,从而可对箱体的底部进行支撑,避免箱体在抓取的过程中出现脱落的情况,使该箱式抓手具备灵活性。
3、该码垛机器人用箱式抓手在使用时,由于夹爪位于两侧,码垛时需要空间伸入和抽出,箱体之间会不可避免的出现空隙,不能有效利用空间;就算使用没有手爪的一面侧对着货物放置,也会因为各个箱体在抓手内位置的不同而产生空隙,从而导致码垛不够紧密使货物侧倾不稳定,具有安全问题。
技术实现思路
1、为了弥补以上不足,本实用新型提供了一种码垛机器人用抓手,用于解决上述问题。
2、本实用新型是这样实现的:
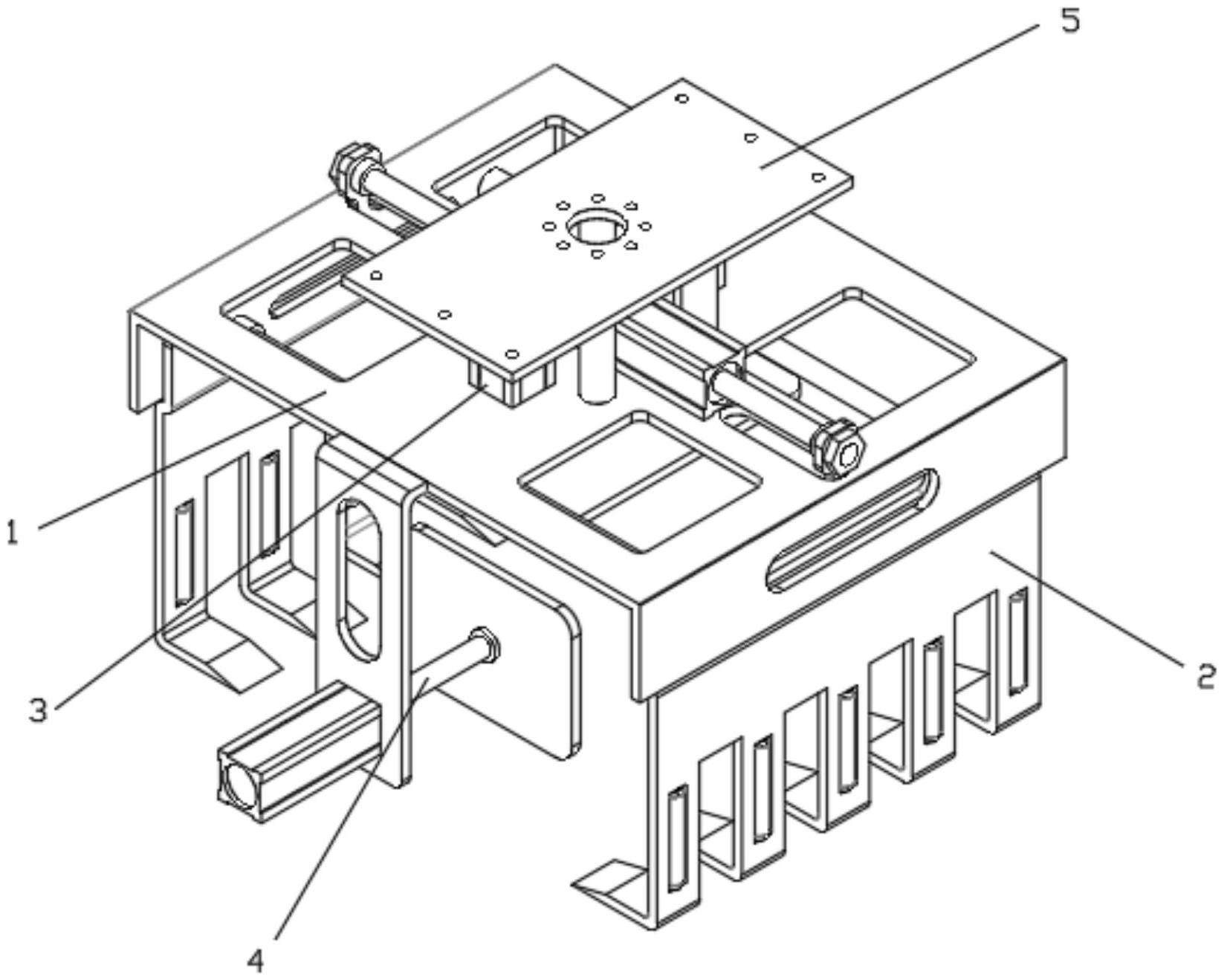
3、一种码垛机器人用抓手,包括顶板,所述顶板顶部呈镜像设置有两个气缸a,所述顶板顶部靠近所述气缸a的输出轴处开设有长孔,所述顶板的左右两侧边缘处设置有侧棱,两条所述侧棱之间对称设置有两个手爪,所述手爪的顶部设置有凸起,所述凸起的一侧开设有螺纹孔,所述凸起处从顶板底部穿过长孔,通过所述螺纹孔与所述气缸a上输出轴的螺栓配合固定连接,所述侧棱之间设置有一对连接杆,所述手爪靠近顶部的一端设置有一对通孔,所述连接杆穿过所述通孔且与所述侧棱固定连接,所述顶板的前侧设置有推动装置,所述推动装置包括气缸c和推板,所述气缸c的输出轴朝向两个所述手爪之间并与所述推板固定连接。
4、在本实用新型的一种实施例中,所述手爪呈“l”字形结构,所述手爪的爪指尖端为锐角设计。
5、在本实用新型的一种实施例中,所述爪指上开设有矩形长孔,所述矩形长孔内部转动设置有滚轴,所述滚轴的两端设置有轴承,所述轴承与所述爪指固定连接。
6、在本实用新型的一种实施例中,还包括固定装置,所述固定装置包括一对气缸b和压板,所述顶板顶部开设有一对方形孔i,所述气缸b固定设置在所述方形孔i内部,且其输出轴向下贯通所述方形孔i,所述压板平行于水平面设置在连接杆下方并与两个所述气缸b的输出轴固定连接。
7、在本实用新型的一种实施例中,所述推动装置通过长板与所述顶板的前侧边缘处连接,所述长板与水平面垂直所述长板靠近下端处开设有方形孔ii,所述气缸c水平设置在所述方形孔ii的内部。
8、在本实用新型的一种实施例中,所述顶板顶部设置有安装座。
9、在本实用新型的一种实施例中,所述侧棱与所述连接杆的连接处设置有橡胶圈。
10、本实用新型的有益效果是:当抓手工作时,可以用顶板后侧的一面对着货物放置,然后通过推动装置将手爪内货物推出,达到放置的货物与货物之间紧密贴合的状态,使货物在放置后不易发生侧倾。另一方面,本码垛机器人用抓手结构简单,轻便灵活,方便生产。
技术特征:
1.一种码垛机器人用抓手,其特征在于:包括顶板(1),所述顶板(1)顶部呈镜像设置有两个气缸a(12),所述顶板(1)顶部靠近所述气缸a(12)的输出轴处开设有长孔(13),所述顶板(1)的左右两侧边缘处设置有侧棱(11),两条所述侧棱(11)之间对称设置有两个手爪(2),所述手爪(2)的顶部设置有凸起(21),所述凸起(21)的一侧开设有螺纹孔(211),所述凸起(21)处从顶板(1)底部穿过长孔(13),通过所述螺纹孔(211)与所述气缸a(12)上输出轴的螺栓配合固定连接,所述侧棱(11)之间设置有一对连接杆(111),所述手爪(2)靠近顶部的一端设置有一对通孔(22),所述连接杆(111)穿过所述通孔(22)且与所述侧棱(11)固定连接,所述顶板(1)的前侧设置有推动装置(4),所述推动装置(4)包括气缸c(42)和推板(41),所述气缸c(42)的输出轴朝向两个所述手爪(2)之间并与所述推板(41)固定连接。
2.根据权利要求1所述的一种码垛机器人用抓手,其特征在于:所述手爪(2)呈“l”字形结构,所述手爪(2)的爪指(23)尖端设置为锐角。
3.根据权利要求2所述的一种码垛机器人用抓手,其特征在于:所述爪指(23)上开设有矩形长孔(231),所述矩形长孔(231)内部转动设置有滚轴(232),所述滚轴(232)的两端设置有轴承(233),所述轴承(233)与所述爪指(23)固定连接。
4.根据权利要求1所述的一种码垛机器人用抓手,其特征在于:还包括固定装置(3),所述固定装置(3)包括一对气缸b(32)和压板(31),所述顶板(1)顶部开设有一对方形孔i(14),所述气缸b(32)固定设置在所述方形孔i(14)内部,且其输出轴向下贯通所述方形孔i(14),所述压板(31)平行于水平面设置在连接杆(111)下方并与两个所述气缸b(32)的输出轴固定连接。
5.根据权利要求1所述的一种码垛机器人用抓手,其特征在于:所述推动装置(4)通过长板(15)与所述顶板(1)的前侧边缘处连接,所述长板(15)与水平面垂直所述长板(15)靠近下端处开设有方形孔ii(151),所述气缸c(42)水平设置在所述方形孔ii(151)的内部。
6.根据权利要求1所述的一种码垛机器人用抓手,其特征在于:所述顶板(1)顶部设置有安装座(5)。
7.根据权利要求1所述的一种码垛机器人用抓手,其特征在于:所述侧棱(11)与所述连接杆(111)的连接处设置有橡胶圈(112)。
技术总结
本技术提供了一种码垛机器人用抓手,包括顶板,所述顶板顶部呈镜像设置有两个气缸A,所述顶板顶部靠近所述气缸A的输出轴处开设有长孔,所述顶板的两侧边缘处设置有侧棱,所述侧棱之间对称设置有两个手爪,所述手爪的顶部设置有凸起,所述凸起的一侧开设有螺纹孔,所述凸起处从顶板底部穿过长孔,通过所述螺纹孔与所述气缸A上输出轴的螺栓配合固定连接,所述侧棱之间设置有一对连接杆,所述连接杆穿透所述手爪与所述侧棱固定连接,所述顶板的前侧设置推动装置,所述推动装置包括气缸C和推板,所述气缸C的输出轴与所述推板固定连接。当抓手工作时,通过推动装置将手爪内货物推出,使放置的货物之间紧密贴合,货物在放置后不易发生侧倾。
技术研发人员:周凯,刘志,胡西雷
受保护的技术使用者:武汉科恒工控工程有限责任公司
技术研发日:20230530
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!