一种叉臂结构及AGV小车的制作方法
本技术涉及agv小车,具体涉及一种叉臂结构及agv小车。
背景技术:
1、如图1所示,为现有技术中的一种叉车式agv,包括agv主体、安装板、插装杆、第一驱动组件和第二驱动组件。其中,安装板沿纵向设置在所述agv主体的顶部并与所述agv主体滑动连接,插装杆设置有两个,两个所述插装杆沿横向相对设置并与所述安装板滑动连接,第一驱动组件设置在所述agv主体上,其用于驱动所述安装板沿纵向作往复直线运动;第二驱动组件设置在所述安装板上,其用于驱动两个所述插装杆相互靠近或远离。
2、上述叉车式agv存在的不足之处在于:其在插装货物的过程中,需要agv移动至插装杆从货物的一侧延伸至另一侧的位置之后,方能达到将货物插装到插装杆上的目的,同样地,在卸载的过程中,需要agv移动至插装杆将货物完全放置到货架上的位置时,方能达到卸载货物的目的,从而导致装卸效率较差。
技术实现思路
1、针对现有技术中的缺陷,本实用新型的目的是提供一种叉臂结构及agv小车,以达到提高装卸效率的目的。
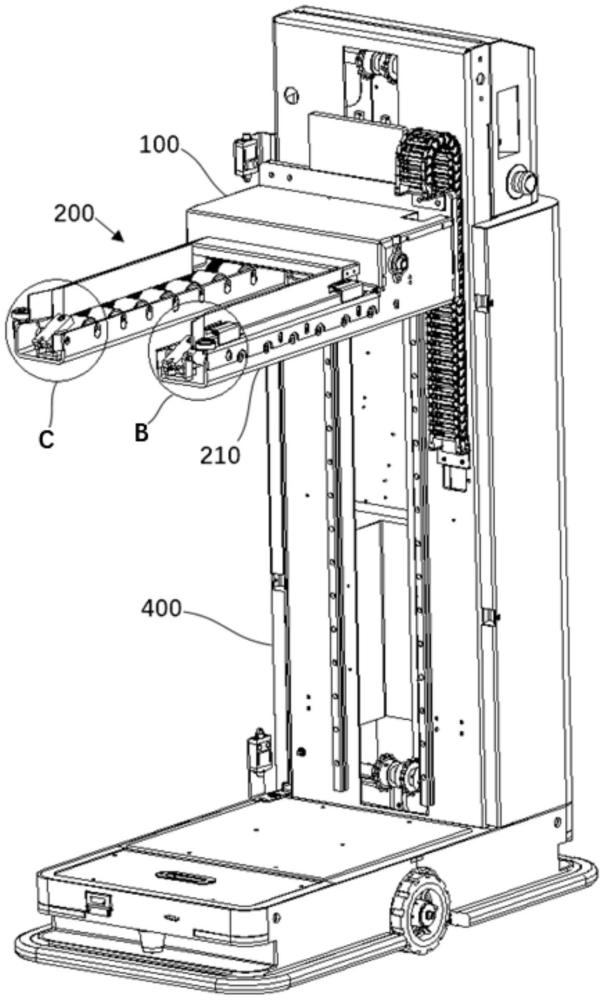
2、为了实现上述目的,一方面,本实用新型提供一种叉臂结构,包括:
3、安装座;
4、两个对称设置的叉臂单元,所述叉臂单元包括:
5、叉臂,其第一端与所述安装座固定连接、第二端向远离所述安装座的方向延伸,其具有安装槽,所述安装槽沿所述叉臂的长度方向延伸;
6、输送辊组,其包括多个输送辊,多个所述输送辊沿所述安装槽的长度方向依次间隔设置并与所述安装槽的侧壁转动连接;以及
7、驱动组件,其设置在所述安装座上,其用于驱动所述输送辊转动;以及
8、货物传感器,其设置有两个,两个所述货物传感器沿所述叉臂的长度方向依次间隔设置并与所述叉臂固定连接。
9、进一步地,所述叉臂单元还包括阻挡组件,所述阻挡组件设置在叉臂的第二端,所述阻挡组件包括:
10、阻挡臂,其设置在所述安装槽内,其中部与所述安装槽的侧壁铰接,且其第一端向靠近所述安装座的方向延伸、第二端向远离所述安装座的方向延伸,其可绕其铰接中心线在第一工作位置和第二工作位置之间往复摆动,其中,当所述阻挡臂处于所述第一工作位置时,所述阻挡臂的第一端延伸至所述输送辊组的输送面以上,当所述阻挡臂处于所述第二工作位置时,所述阻挡臂的第一端回缩至所述输送辊组的输送面以下;以及
11、驱动模块,其设置在所述叉臂和/或所述阻挡臂上,其用于驱动所述阻挡臂在所述第一工作位置和所述第二工作位置之间往复摆动。
12、进一步地,所述驱动模块包括:
13、配重块,所述配重块设置在所述阻挡臂的第二端,以使得所述阻挡臂的第二端相对于其自身的铰接中心线的力矩大于所述阻挡臂的第一端相对于其自身铰接中心线的力矩;
14、吸力块,其设置在所述阻挡臂的第一端,其由磁性材料制成;以及
15、电磁铁,其设置在所述安装槽内并与所述叉臂固定连接;
16、其中,所述阻挡臂由非磁性材料制成。
17、进一步地,所述配重块为轴承。
18、进一步地,所述吸力块为螺栓,所述吸力块与所述阻挡臂螺纹连接。
19、进一步地,所述叉臂单元还包括限位轮,所述限位轮设置在所述叉臂的自由端并位于两个所述叉臂的相互背离的一侧,所述限位轮与所述叉臂转动连接。
20、进一步地,所述限位轮为轴承。
21、进一步地,所述叉臂包括:
22、第一安装板,其横截面呈u字形,所述输送辊设置在所述第一安装板内;以及
23、第二安装板,其包括一体成型的第一板体、第二板体和第三板体,所述第一板体、所述第二板体和所述第三板体依次连接以形成z字形,所述第一板体与两个所述第一安装板的相互远离的一侧固定连接,所述第二板体的远离所述第一板体的一侧向所述第一安装板的中心延伸,所述第三板体的远离所述第二板体的一侧向上延伸,所述货物传感器设置在所述第二板体的顶部。
24、另一方面,一种agv小车,包括agv主体,还包括上述任意一项所述叉臂结构。
25、本实用新型的有益效果:
26、本实用新型所提供的叉臂结构及agv小车,结构简单,设计合理,通过在叉臂上设置输送辊组,从而使得agv小车在装载的过程中,无需运动至叉臂从货物的一侧延伸至另一侧的位置之后,方能达到将货物插装到叉臂上的目的,同样地,在卸载的过程中,无需agv移动至插装杆将货物完全放置到货架上的位置之后,方能达到卸载货物的目的,进而达到提高装卸效率的目的。
技术特征:
1.一种叉臂结构,其特征在于:包括:
2.根据权利要求1所述的叉臂结构,其特征在于:所述叉臂单元还包括阻挡组件,所述阻挡组件设置在叉臂的第二端,所述阻挡组件包括:
3.根据权利要求2所述的叉臂结构,其特征在于:所述驱动模块包括:
4.根据权利要求3所述的叉臂结构,其特征在于:所述配重块为轴承。
5.根据权利要求3所述的叉臂结构,其特征在于:所述吸力块为螺栓,所述吸力块与所述阻挡臂螺纹连接。
6.根据权利要求1-4任意一项所述的叉臂结构,其特征在于:所述叉臂单元还包括限位轮,所述限位轮设置在所述叉臂的自由端并位于两个所述叉臂的相互背离的一侧,所述限位轮与所述叉臂转动连接。
7.根据权利要求6所述的叉臂结构,其特征在于:所述限位轮为轴承。
8.根据权利要求1-4任意一项所述的叉臂结构,其特征在于:所述叉臂包括:
9.一种agv小车,包括agv主体,其特征在于:还包括权利要求1-8任意一项所述叉臂结构。
技术总结
本技术属于AGV小车技术领域,提供了一种叉臂结构,包括:安装座;两个对称设置的叉臂单元,叉臂单元包括:叉臂,其第一端与安装座固定连接、第二端向远离安装座的方向延伸,其具有安装槽;输送辊组,其包括多个输送辊,多个输送辊沿安装槽的长度方向依次间隔设置并与安装槽的侧壁转动连接;以及驱动组件,其设置在安装座上,其用于驱动输送辊转动;以及货物传感器,其设置有两个,两个货物传感器沿叉臂的长度方向依次间隔设置并与叉臂固定连接;还提供了一种AGV小车,包括AGV主体和上述叉臂结构。本技术所提供的叉臂结构及AGV小车,结构简单,设计合理,装卸货物的效率较高。
技术研发人员:刘辉成,吴银峰,方鹏橙
受保护的技术使用者:重庆嘉腾机器人自动化有限公司
技术研发日:20230607
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!