外部旋转关节和手术机器人的制作方法
本申请涉及手术器械的,具体而言涉及一种外部旋转关节和手术机器人。
背景技术:
1、手术机器人的末端通常有三个或四个直线运动模组,直线运动模组上通常配有内窥镜及手术器械的驱动模组。同时为方便手术过程中内窥镜及手术器械的不同角度需求,在末端通常会增加外部旋转关节(简称orj),用于实现三个或四个直线运动模组的旋转。
2、由于每个直线运动模组及内窥镜或手术器械驱动模组都需要线缆进行供电及通信,因此在外部旋转关节的外部固定部分与内部旋转部分之间的环形区域内,始终有多股线缆处于运动之中。现有放置这些线缆的方式在功能和外观完整性上存在很多局限性。
3、因此,需要一种外部旋转关节和手术机器人,以至少部分地解决以上问题。
技术实现思路
1、在实用新型的内容部分中引入了一系列简化形式的概念,这将在具体实施方式部分中进一步详细说明。本实用新型的内容部分并不意味着要试图限定出所要求保护的技术方案的关键特征和必要技术特征,更不意味着试图确定所要求保护的技术方案的保护范围。
2、为至少部分地解决上述问题,本申请提供了一种外部旋转关节,用于手术机器人,其包括:
3、固定外环;
4、转动内环,所述转动内环相对于所述固定外环围绕旋转轴线旋转;以及
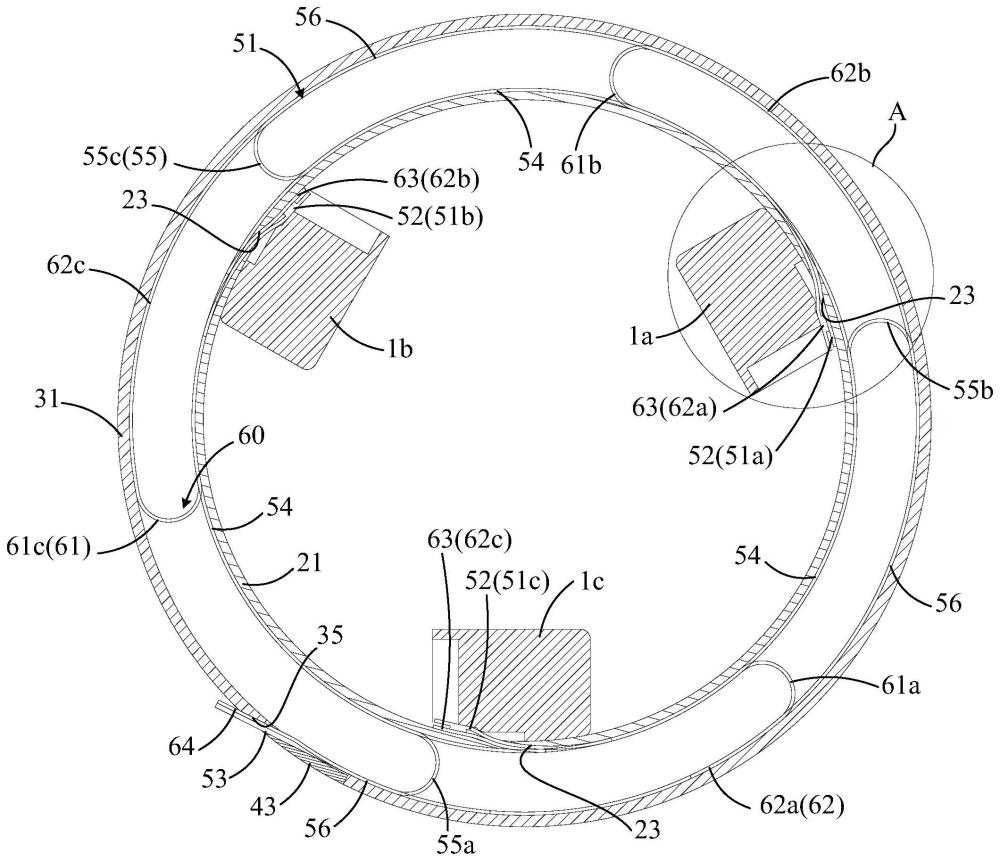
5、电缆组,所述电缆组包括多个柔性扁平电缆,所述多个柔性扁平电缆以绕紧和退绕的方式沿周向设置于所述转动内环与所述固定外环形成的环形空间内,
6、其中,所述多个柔性扁平电缆中的每一个包括至少一个第一端部和一个第二端部,所述多个柔性扁平电缆的所述第一端部中的每一个分别相对于所述转动内环固定设置,所述第二端部均相对于所述固定外环固定设置。
7、本申请还提供了一种手术机器人,其包括:
8、多个运动模组;以及
9、上述所述外部旋转关节,所述多个柔性扁平电缆中的至少一部分的第一端部与对应的所述运动模组连接。
10、根据本申请的外部旋转关节和手术机器人,使用转动内环和固定外环作为走线机构的内外支撑,结构强度能够得到很大地提高,达到较高水平。走线机构能够随转动内环一起相对于固定外环转动,不用依赖额外的驱动转动机构,结构精简,空间利用率大大提高。使用柔性扁平电缆形成走线机构,在功能和外观完整性上能够有更多的设计自由度,例如走线机构大部分隐藏在转动内环和固定外环之间,不影响外观完整性,可以使外部旋转关节的外部尺寸更小化,柔性扁平电缆布置容易且长度较短,能够很好地维持其转动且形状不散乱。当挂载不同数量的运动模组时,需按运动模组数量重新沿周向均布对应数量的柔性扁平电缆,可适应多种挂载需求。
技术特征:
1.一种外部旋转关节,用于手术机器人,其特征在于,包括:
2.根据权利要求1所述的外部旋转关节,其特征在于,所述多个柔性扁平电缆中的每一个弯折形成内周部、弯折部和外周部,所述外部旋转关节还包括压线结构,所述压线结构设置于所述多个柔性扁平电缆中的至少一个处,以使对应的所述内周部紧贴所述转动内环以及使对应的所述外周部紧贴所述固定外环。
3.根据权利要求2所述的外部旋转关节,其特征在于,所述压线结构包括支撑部,所述支撑部抵靠所述内周部和所述外周部中的至少一者。
4.根据权利要求3所述的外部旋转关节,其特征在于,所述外部旋转关节配置成在所述转动内环旋转时,所述支撑部的位置与所述弯折部同步转动。
5.根据权利要求3所述的外部旋转关节,其特征在于,所述支撑部的个数小于所述多个柔性扁平电缆的个数,或者所述多个柔性扁平电缆中的每一个对应于至少一个所述支撑部。
6.根据权利要求5所述的外部旋转关节,其特征在于,所述多个柔性扁平电缆中的每一个对应于相同个数的所述支撑部,且所述支撑部沿周向均匀分布。
7.根据权利要求3所述的外部旋转关节,其特征在于,所述支撑部与所述弯折部之间存在预设距离,以避免在所述转动内环旋转时两者之间产生干涉。
8.根据权利要求3所述的外部旋转关节,其特征在于,所述压线结构包括柔性带状件,所述柔性带状件弯折以在弯折处形成所述支撑部。
9.根据权利要求8所述的外部旋转关节,其特征在于,所述柔性带状件与对应的所述柔性扁平电缆并行绕设并设于相邻的所述柔性扁平电缆之间。
10.根据权利要求8所述的外部旋转关节,其特征在于,所述柔性带状件沿与所述弯折部相同的弯折方向弯折。
11.根据权利要求8所述的外部旋转关节,其特征在于,所述柔性带状件的内侧端部与对应的所述柔性扁平电缆的第一端部固定在一起,所述柔性带状件的外侧端部与所述柔性扁平电缆的第二端部固定在一起。
12.根据权利要求11所述的外部旋转关节,其特征在于,所述柔性扁平电缆的第一端部设置有连接板,所述连接板与所述转动内环连接,所述柔性带状件的内侧端部夹紧在所述第一端部与所述转动内环之间。
13.根据权利要求3所述的外部旋转关节,其特征在于,所述压线结构包括滚轮组件,所述滚轮组件设置于所述转动内环与所述固定外环之间且包括沿周向间隔设置的多个滚轮,所述多个滚轮围绕自身的沿轴向延伸的中心轴线旋转并用作为所述支撑部。
14.根据权利要求13所述的外部旋转关节,其特征在于,所述滚轮组件还包括环形的安装架和支撑轴承,所述多个滚轮可旋转地安装至所述安装架,所述支撑轴承设置在所述安装架的内侧并与所述转动内环活动连接。
15.根据权利要求14所述的外部旋转关节,其特征在于,所述安装架包括第一架部分和第二架部分,所述第一架部分和所述第二架部分构造成半环形且两者对接,或者所述第一架部分和所述第二架部分构造成整环形且两者沿轴向连接。
16.根据权利要求3所述的外部旋转关节,其特征在于,还包括差速结构,用于使所述转动内环和所述柔性扁平电缆之间存在差速传动。
17.根据权利要求16所述的外部旋转关节,其特征在于,所述差速结构包括内环齿圈、外环齿圈和多个行星齿轮,所述内环齿圈固定至所述转动内环,所述外环齿圈位于所述内环齿圈的径向外侧并固定至所述固定外环,所述多个行星齿轮设于所述内环齿圈和所述外环齿圈之间并与两者啮合。
18.根据权利要求17所述的外部旋转关节,其特征在于,还包括环形的安装架,所述行星齿轮通过连接轴可旋转地安装至所述安装架。
19.根据权利要求3所述的外部旋转关节,其特征在于,所述压线结构包括多个环形柔轮,所述环形柔轮用作为所述支撑部。
20.根据权利要求16所述的外部旋转关节,其特征在于,所述差速结构包括支撑内环、支撑外环和多个环形柔轮,所述支撑内环固定至所述转动内环,所述支撑外环位于所述支撑内环的径向外侧并固定至所述固定外环,所述多个柔性扁平电缆设置于所述支撑内环和所述支撑外环之间,所述环形柔轮设置于所述柔性扁平电缆处并与所述支撑内环和所述支撑外环传动连接。
21.根据权利要求20所述的外部旋转关节,其特征在于,所述环形柔轮在轴向上的至少一个端部间隔设置有多个接合口,所述支撑内环沿周向间隔设置有多个第一齿,所述支撑外环沿周向间隔设置有多个第二齿,所述多个第一齿与所述多个接合口中的靠近内侧的接合口接合,所述多个第二齿与所述多个接合口中的靠近外侧的接合口接合。
22.根据权利要求21所述的外部旋转关节,其特征在于,所述环形柔轮在轴向上的两个端部均设置有所述多个接合口,所述支撑内环在轴向上的两个端部均设置有所述多个第一齿,所述支撑外环在轴向上的两个端部均设置有所述多个第二齿,端部位置相对应的所述接合口与所述第一齿和所述第二齿接合。
23.根据权利要求21所述的外部旋转关节,其特征在于,所述接合口构造成在轴向上一侧开放或周圈封闭。
24.根据权利要求20所述的外部旋转关节,其特征在于,所述转动内环沿周向间隔设置有多个内侧开口,所述固定外环设置有外侧开口,所述多个柔性扁平电缆的所述第一端部中的每一个分别从不同的所述内侧开口伸出,所述第二端部从所述外侧开口伸出,所述支撑内环沿周向间隔设置有多个内侧出线口,所述内侧出线口与所述内侧开口位置相对应以便所述柔性扁平电缆走线;所述支撑外环设置有外侧出线口,所述外侧出线口与所述外侧开口位置相对应以便所述柔性扁平电缆走线。
25.根据权利要求21所述的外部旋转关节,其特征在于,所述支撑外环包括第一外环部分和第二外环部分,所述第一外环部分和所述第二外环部分构造成半环形且两者对接,或者所述第一外环部分和所述第二外环部分构造成整环形且两者沿轴向连接。
26.根据权利要求25所述的外部旋转关节,其特征在于,所述第一外环部分和所述第二外环部分中的一者设置有在轴向上凸出的定位凸起,所述第一外环部分和所述第二外环部分中的另一者设置有在轴向上凹陷的定位凹槽,所述定位凸起对接于所述定位凹槽内。
27.根据权利要求20所述的外部旋转关节,其特征在于,所述差速结构还包括止转件,所述转动内环设置有第一插接口,所述支撑内环设置有第二插接口,所述止转件插接在所述第一插接口和所述第二插接口内。
28.根据权利要求1至27中的任一项所述的外部旋转关节,其特征在于,所述多个柔性扁平电缆中的每一个包括一个所述第一端部,且所述多个柔性扁平电缆具有相同的绕设方向和弯折方向。
29.根据权利要求1至23、25至27中的任一项所述的外部旋转关节,其特征在于,所述转动内环沿周向间隔设置有多个内侧开口,所述固定外环设置有外侧开口,所述多个柔性扁平电缆的所述第一端部中的每一个分别从不同的所述内侧开口伸出,所述第二端部从所述外侧开口伸出。
30.根据权利要求29所述的外部旋转关节,其特征在于,
31.根据权利要求29所述的外部旋转关节,其特征在于,所述转动内环在所述内侧开口处设置有与所述第一端部的伸出方向一致的引导斜面,所述固定外环在所述外侧开口处设置有与所述第二端部的伸出方向一致的引导斜面。
32.根据权利要求1至27中的任一项所述的外部旋转关节,其特征在于,还包括从动构件和驱动模块,所述从动构件沿周向设置于所述转动内环的外部,所述驱动模块包括围绕自身轴线可旋转的主动构件,所述主动构件的至少一部分伸入所述固定外环并与所述从动构件传动连接。
33.根据权利要求32所述的外部旋转关节,其特征在于,所述主动构件和所述从动构件为齿轮并且两者直接啮合;或者所述主动构件通过链条或带与所述从动构件传动连接。
34.根据权利要求1至27中的任一项所述的外部旋转关节,其特征在于,所述转动内环和所述固定外环中的至少一者采用金属材料制成。
35.一种手术机器人,其特征在于,包括:
技术总结
本申请公开了一种外部旋转关节和手术机器人,其包括固定外环、转动内环和电缆组,转动内环相对于固定外环围绕旋转轴线旋转;电缆组包括多个柔性扁平电缆,多个柔性扁平电缆以绕紧和退绕的方式沿周向设置于转动内环与固定外环形成的环形空间内,多个柔性扁平电缆的第一端部中的每一个分别相对于转动内环固定设置,第二端部均相对于固定外环固定设置。根据本申请,外部旋转关节的结构强度能够得到很大地提高,达到较高水平,走线机构能够随转动内环一起相对于固定外环转动,不用依赖额外的驱动转动机构,结构精简,空间利用率大大提高,在功能和外观完整性上能够有更多的设计自由度。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:深圳康诺思腾科技有限公司
技术研发日:20230630
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!