一种自动化生产线用地轨式搬运机器人的制作方法
本技术涉及搬运机器人领域,尤其涉及一种自动化生产线用地轨式搬运机器人。
背景技术:
1、随着时代的发展,人类进入了智能时代与信息时代,人类对机器人的研究变得多样化,在现代自动化制造业的发展过程中,机器人搬运技术发挥着极为重要的作用。
2、现有的搬运机器人,是通过将机器人安装在移动台上,让其在导轨上进行移动搬运,在机器人移动搬运时,可能由于机械臂与产品没有夹紧,产品砸落在移动台上,使移动台受损不能继续移动,影响工作进度。
3、因此现在研发出了一种对移动台进行防护,避免移动台受损,影响工作进度的自动化生产线用地轨式搬运机器人。
技术实现思路
1、为了克服现有的搬运机器人,可能由于机械臂与产品没有夹紧,产品砸落在移动台上,使移动台受损不能继续移动,影响工作进度的缺点,本实用新型提供一种对移动台进行防护,避免移动台受损,影响工作进度的自动化生产线用地轨式搬运机器人。
2、本实用新型的技术实施方案是:一种自动化生产线用地轨式搬运机器人,包括有工作轨、动力轨、移动台、机械臂、动力座、驱动电机和防护机构,工作轨前后两侧均连接有动力轨,前侧动力轨上设有齿块,工作轨上部滑动式连接有移动台,移动台顶部转动式连接有机械臂,移动台前部连接有动力座,动力座右侧连接有驱动电机,驱动电机输出轴上设有齿轮,齿轮与前侧动力轨上的齿块啮合,移动台上设有防护的防护机构。
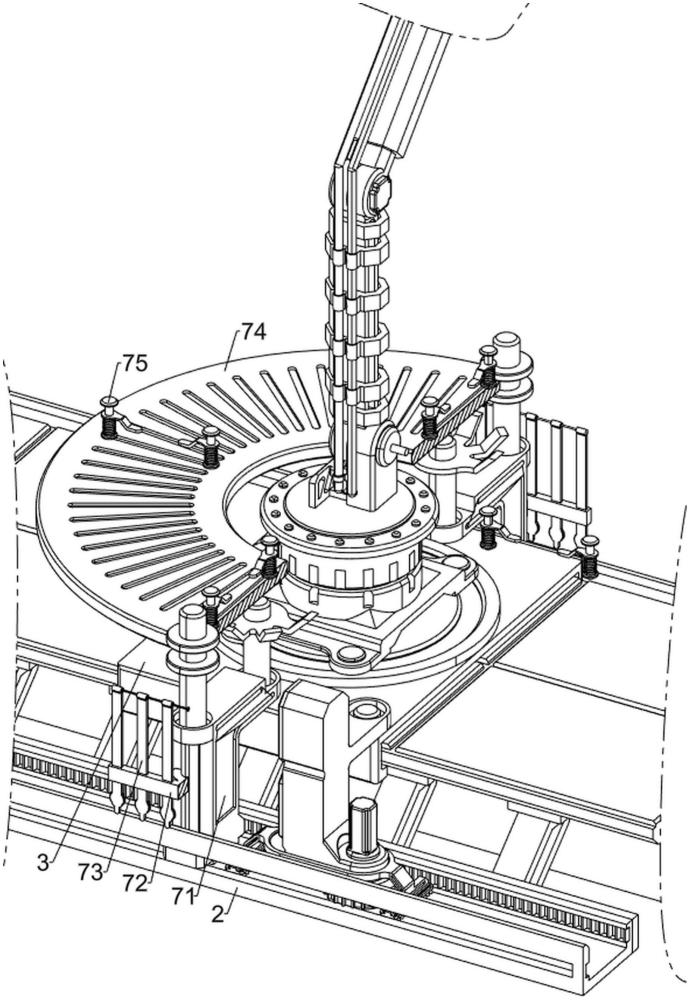
3、可选地,防护机构包括有旁座、升降架、竖直隔杆、工作环和弹簧压片,移动台中部前后两侧均连接有旁座,旁座均与动力轨滑动式连接,旁座上均滑动式连接有升降架,升降架上均连接有多个竖直隔杆,旁座上部之间卡接有工作环,工作环下部与旁座连接,工作环上连接有多个弹簧压片,将旁座上的升降架调整至合适的位置,在旁座开始移动时,竖直隔杆可以防止误触,将有标志性样本通过弹簧压片固定在工作环上,可以对产品进行对比,当机械臂在夹持产品时,如果机械臂脱力,产品掉落,工作环可以对掉落的产品进行阻挡,避免产品直接砸落移动台上。
4、可选地,清洁机构包括有侧架、弹簧压球和旋转洁杆,移动台前后两侧均连接有侧架,侧架左右两侧均滑动式连接有弹簧压球,移动台左右两侧均转动式连接有旋转洁杆,弹簧压球均与旋转洁杆连接,旋转洁杆向下转动,使侧架上的弹簧压球拉伸,不使用移动台时弹簧压球收缩,使旋转洁杆复位。
5、可选地,动力轨为凹形结构。
6、可选地,机械臂上设有安装座。
7、可选地,机械臂上设有夹紧件。
8、本实用新型具有如下优点:1、本实用新型通过当机械臂在夹持产品时,如果机械臂脱力,产品掉落,工作环可以对掉落的产品进行阻挡,避免产品直接砸落工作轨上,达到了对工作轨进行防护,避免工作轨受损,影响工作进度的效果。
9、2、本实用新型通过旋转洁杆向下转动,使侧架上的弹簧压球受到拉伸,旋转洁杆在工作轨上转动,达到了能够起到清洁工作轨上杂物,避免移动台在移动时卡入杂物的效果。
技术特征:
1.一种自动化生产线用地轨式搬运机器人,其特征是:包括有工作轨(1)、动力轨(2)、移动台(3)、机械臂(4)、动力座(5)、驱动电机(6)和防护机构(7),工作轨(1)前后两侧均连接有动力轨(2),前侧动力轨(2)上设有齿块,工作轨(1)上部滑动式连接有移动台(3),移动台(3)顶部转动式连接有机械臂(4),移动台(3)前部连接有动力座(5),动力座(5)右侧连接有驱动电机(6),驱动电机(6)输出轴上设有齿轮,齿轮与前侧动力轨(2)中的齿块啮合,移动台(3)上设有防护的防护机构(7)。
2.按照权利要求1所述的一种自动化生产线用地轨式搬运机器人,其特征是:防护机构(7)包括有旁座(71)、升降架(72)、竖直隔杆(73)、工作环(74)和弹簧压片(75),移动台(3)中部前后两侧均连接有旁座(71),旁座(71)均与动力轨(2)滑动式连接,旁座(71)上均滑动式连接有升降架(72),升降架(72)上均连接有多个竖直隔杆(73),旁座(71)上部之间卡接有工作环(74),工作环(74)下部与旁座(71)连接,工作环(74)上连接有多个弹簧压片(75)。
3.按照权利要求2所述的一种自动化生产线用地轨式搬运机器人,其特征是:清洁机构(8)包括有侧架(81)、弹簧压球(82)和旋转洁杆(83),移动台(3)前后两侧均连接有侧架(81),侧架(81)左右两侧均滑动式连接有弹簧压球(82),移动台(3)左右两侧均转动式连接有旋转洁杆(83),弹簧压球(82)均与旋转洁杆(83)连接,旋转洁杆(83)向下转动,使侧架(81)上的弹簧压球(82)拉伸,不使用移动台(3)时弹簧压球(82)收缩,使旋转洁杆(83)复位。
4.按照权利要求1所述的一种自动化生产线用地轨式搬运机器人,其特征是:动力轨(2)为凹形结构。
5.按照权利要求1所述的一种自动化生产线用地轨式搬运机器人,其特征是:机械臂(4)上设有安装座。
6.按照权利要求1所述的一种自动化生产线用地轨式搬运机器人,其特征是:机械臂(4)上设有夹紧件。
技术总结
本技术涉及搬运机器人领域,尤其涉及一种自动化生产线用地轨式搬运机器人。本技术提供一种对移动台进行防护,避免移动台受损,影响工作进度的自动化生产线用地轨式搬运机器人。一种自动化生产线用地轨式搬运机器人,包括有工作轨、动力轨、移动台、机械臂和动力座等,工作轨前后两侧均连接有动力轨,前侧动力轨上设有齿块,工作轨上部滑动式连接有移动台,移动台顶部转动式连接有机械臂,移动台前部连接有动力座。本技术通过当机械臂在夹持产品时,如果机械臂脱力,产品掉落,工作环可以对掉落的产品进行阻挡,避免产品直接砸落工作轨上,达到了对工作轨进行防护,避免工作轨受损,影响工作进度的效果。
技术研发人员:邵中魁,朱征东,王子宝,沈小丽,盛云庆
受保护的技术使用者:浙江省机电设计研究院有限公司
技术研发日:20230704
技术公布日:2024/2/1
- 还没有人留言评论。精彩留言会获得点赞!