一种有轨电车定位偏离智能校准方法与流程
本发明涉及无线电定位校正,具体涉及一种有轨电车定位偏离智能校准方法。
背景技术:
1、对有轨电车进行准确的定位有助于提高有轨电车系统的运行安全性,因此通常借助全球定位系统(global positioning system,gps)等定位技术对有轨电车进行实时定位,但是考虑到有轨电车运行过程中产生的定位数据较多,因此为了方便储存和传输,通常需要对有轨电车运行过程中的定位数据进行压缩。现有技术通常采用能够保留定位数据关键特征且简单高效的dp轨迹压缩算法对有轨电车运行过程中产生的电车定位点数据进行压缩。
2、但是考虑到dp轨迹压缩算法在对电车定位点数据进行压缩时,对所有电车定位点的误差损失衡量标准一致,当误差损失阈值较大时,会导致异常的偏移定位损失程度大;当误差损失阈值较小时,会导致压缩效率较差;并且在电车意外出轨的情况下,可能由于噪声等外界干扰产生的定位偏移的影响,导致电车意外出轨对应的电车定位点出现在电车轨道上,使得无法准确的发现电车定位异常的情况,使得dp轨迹压缩算法压缩时无法精准的保留异常定位偏移,即现有技术采样dp轨迹压缩算法无法准确的保留有轨电车在轨定位点的异常定位偏离特征,对有轨电车定位偏离的校准能力较差。
技术实现思路
1、为了解决现有技术采样dp轨迹压缩算法无法准确的保留有轨电车在轨定位点的异常定位偏离特征,对有轨电车定位偏离的校准能力较差的技术问题,本发明的目的在于提供一种有轨电车定位偏离智能校准方法,所采用的技术方案具体如下:
2、本发明提出了一种有轨电车定位偏离智能校准方法,所述方法包括:
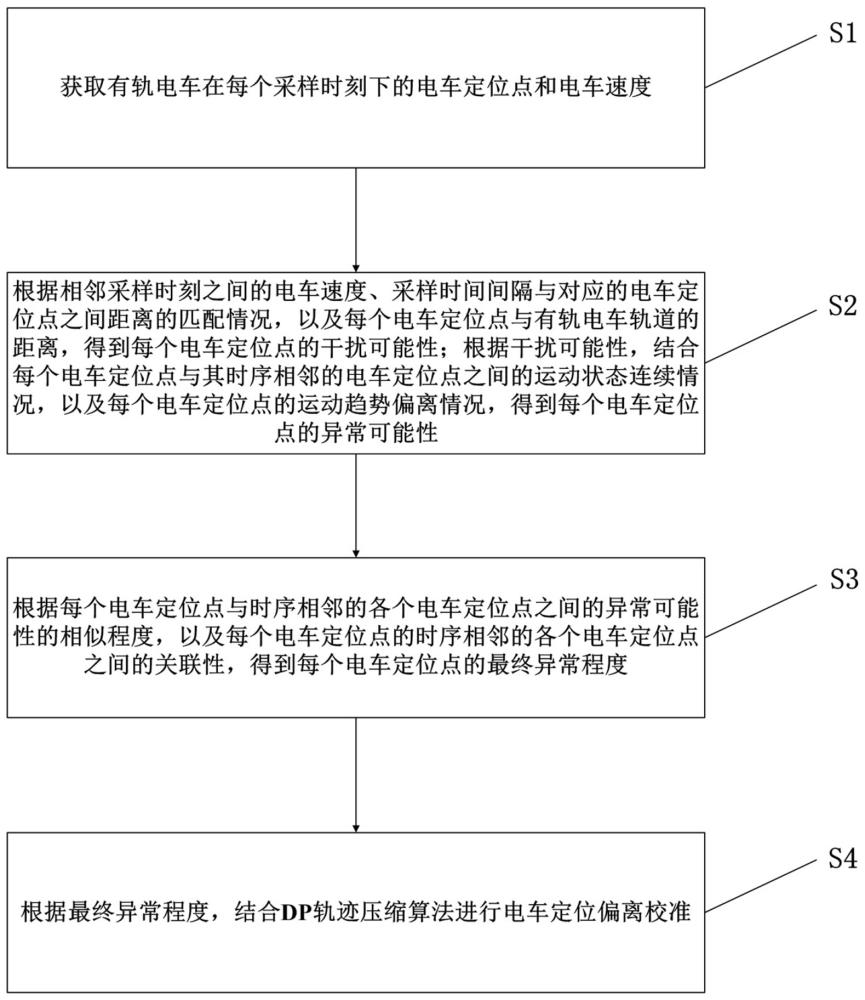
3、获取有轨电车在每个采样时刻下的电车定位点和电车速度;
4、根据相邻采样时刻之间的电车速度、采样时间间隔与对应的电车定位点之间距离的匹配情况,以及每个电车定位点与有轨电车轨道的距离,得到每个电车定位点的干扰可能性;根据所述干扰可能性,结合每个电车定位点与其时序相邻的电车定位点之间的运动状态连续情况,以及每个电车定位点的运动趋势偏离情况,得到每个电车定位点的异常可能性;
5、根据每个电车定位点与时序相邻的各个电车定位点之间的异常可能性的相似程度,以及每个电车定位点的时序相邻的各个电车定位点之间的关联性,得到每个电车定位点的最终异常程度;
6、根据所述最终异常程度,结合dp轨迹压缩算法进行电车定位偏离校准。
7、进一步地,所述干扰可能性的获取方法包括:
8、将每个电车定位点与有轨电车轨道之间的最小距离,作为每个电车定位点的轨道偏差距离;
9、将每个电车定位点的上个采样时刻的电车定位点,作为每个电车定位点的对比定位点;将每个电车定位点的电车速度与对应的对比定位点的电车速度之间的均值,作为每个电车定位点的参考平均速度;
10、将每个电车定位点与对应的对比定位点之间的欧氏距离,作为每个电车定位点的参考变化距离;
11、根据所述轨道偏差距离、所述参考平均速度、所述参考变化距离以及相邻采样时刻之间的时间间隔,构建干扰可能性计算模型;根据所述干扰可能性计算模型,得到每个电车定位点的干扰可能性。
12、进一步地,所述异常可能性的获取方法包括:
13、根据所有采样时刻下的电车定位点以时间顺序进行曲线拟合,得到电车轨迹二维曲线;在所有电车定位点中,将与有轨电车轨道之间距离小于预设误差阈值的电车定位点,作为在轨定位点;
14、在时间顺序上,将每个电车定位点之前时间间隔最小的在轨定位点,作为每个电车定位点的第一在轨定位点;将每个电车定位点之后时间间隔最小的在轨定位点,作为每个电车定位点的第二在轨定位点;
15、在所述电车轨迹二维曲线上,将所述第一在轨定位点的切线斜率与所述第二在轨定位点的切线斜率之间的均值,作为每个电车定位点的参考斜率;将每个电车定位点对应的第一在轨定位点与第二在轨定位点之间的所有电车定位点,作为每个电车定位点的干扰参考定位点;
16、在所述电车轨迹二维曲线上,根据每个电车定位点的切线斜率与所述参考斜率之间的差异,结合根据每个电车定位点的干扰可能性以及对应的各个邻接参考定位点的速度变化情况,构建异常可能性计算模型;根据所述异常可能性计算模型,得到每个电车定位点的异常可能性。
17、进一步地,所述最终异常程度的获取方法包括:
18、获取采样时间间隔;将每个电车定位点的预设邻域窗口内其余各个电车定位点,作为每个电车定位点的邻域定位点;根据每个邻域定位点的电车速度、所述采样时间间隔,以及每个电车定位点预设邻域窗口内的轨道路径长度和对应的异常可能性,得到每个电车定位点的干扰影响程度;
19、根据每个电车定位点对应的各个邻域定位点之间异常可能性的差异,以及各个邻域定位点的干扰影响程度的整体分布情况,构建最终异常程度计算模型,根据所述最终异常程度计算模型,得到每个电车定位点的最终异常程度。
20、进一步地,所述根据所述最终异常程度,结合dp轨迹压缩算法进行电车定位偏离校准的方法包括:
21、获取dp轨迹压缩过程中每个电车定位点的初始轨迹损失值;将所述初始轨迹损失值与所述最终异常程度的乘积,作为dp轨迹压缩过程中每个电车定位点的修正轨迹损失值,根据每个电车定位点的修正轨迹损失值和dp轨迹压缩算法的预设损失阈值进行dp轨迹压缩,得到修正路径数据;根据所述修正路径数据进行电车定位偏离校准。
22、进一步地,所述干扰可能性计算模型包括:
23、其中,为第个电车定位点的干扰可能性,为第个电车定位点的轨道偏差距离, 为第 个电车定位点的参考平均速度, 为相邻采样时刻之间的时间间隔,为第个电车定位点的参考变化距离。
24、进一步地,所述异常可能性计算模型包括:
25、其中,为第个电车定位点的异常可能性, 为第个电车定位点的干扰可能性, 为第个电车定位点的参考斜率,为每个电车定位点在电车轨迹二维曲线上的切线斜率;为第个电车定位点对应的干扰参考定位点的数量;为第个电车定位点对应的第个干扰参考定位点的电车速度;为第个电车定位点对应的第个干扰参考定位点的电车速度; 为绝对值符号; 为归一化函数。
26、进一步地,所述干扰影响程度的获取方法包括:
27、将每个电车定位点预设邻域窗口内的轨道路径长度,作为每个电车定位点的邻域轨道长度;将每个邻域定位点的电车速度与所述采样时间间隔的乘积,作为每个邻域定位点的局部参考路程;将所有邻域定位点的局部参考路程的累加和,作为每个电车定位点的参考行驶路程;
28、将所述轨道路径长度与所述参考行驶路程之间的差异,作为每个电车定位点的参考路径误差;根据所述参考路径误差与所述异常可能性,得到每个电车定位点的干扰影响程度,所述参考路径误差和所述异常可能性均与所述干扰影响程度呈正相关关系。
29、进一步地,所述最终异常程度计算模型包括:
30、其中,为第个电车定位点的最终异常程度,为第个电车定位点对应的所有邻域定位点的干扰影响程度的方差;为第个电车定位点对应的邻域定位点的数量;为第个电车定位点对应的第个邻域定位点的异常可能性;为第个电车定位点对应的第个邻域定位点的异常可能性;为绝对值符号。
31、进一步地,所述根据所述参考路径误差与所述异常可能性,得到每个电车定位点的干扰影响程度的方法包括:
32、将所述参考路径误差与所述异常可能性的乘积,作为每个电车定位点的干扰影响程度。
33、本发明具有如下有益效果:
34、对于有轨电车而言,正常行驶过程中对应的位置一定在轨道上,因此当电车定位点与轨有轨电车轨道的距离越远时,对应的电车定位点受到干扰的可能性越大。并且在有轨电车的具体运行环境中,其速度通常较为稳定,且速度变化通常较为缓慢,当根据瞬时速度计算出的距离与两个电车定位点之间的实际距离相差较大时,说明电车定位点受到干扰的可能性越大,因此根据相邻采样时刻之间的电车速度、采样时间间隔与对应的电车定位点之间距离的匹配情况,以及每个电车定位点与有轨电车轨道的距离,得到每个电车定位点的干扰可能性。但是考虑到可能出现电车意外事故导致脱轨的情况,在电车脱轨后,其对应的速度变化和轨道路径变化会与正常情况存在较为明显的差异,因此进一步地在干扰可能性的基础上,结合每个电车定位点与其时序相邻的电车定位点之间的运动状态连续情况,以及每个电车定位点的运动趋势偏离情况,得到每个电车定位点的异常可能性。又考虑到可能存在受到干扰的电车定位点恰好出现在轨道上的情况,因此仅通过异常可能性判断异常特征可能存在少许误差,考虑到正常情况下,时序连续的电车定位点之间的关联性较高,而出现异常的电车定位点时,会由于连续性带来的影响滞后性,导致异常的电车定位点时序相邻的电车定位点之间的关联性被破坏,对应的时序相邻的电车定位点之间的异常可能性的统一性也会受到影响,因此进一步地结合异常可能性以及各个电车定位点之间的关联性,得到每个电车定位点的最终异常程度。进一步地根据最终异常程度,结合dp轨迹压缩算法进行电车定位偏离校准,增大异常定位偏移的在轨定位点与正常的定位点之间的区别,使得dp轨迹压缩算法对有轨电车定位点数据进行压缩时对异常定位偏离特征的损失更小,对有轨电车定位偏离的校准能力更好。
- 还没有人留言评论。精彩留言会获得点赞!