一种零散废旧物品回收机器人的制作方法
本技术涉及机器人,具体是一种零散废旧物品回收机器人。
背景技术:
1、智能机器人之所以叫智能机器人,这是因为它有相当发达的“大脑”。在脑中起作用的是中央处理器,这种计算机跟操作它的人有直接的联系。最主要的是,这样的计算机可以进行按目的安排的动作。正因为这样,我们才说这种机器人才是真正的机器人,尽管它们的外表可能有所不同。智能机器人的应用范围十分广泛,其中办公室废品回收是其应用范围之一。
2、公开号为cn113511434a中国实用新型公开的一种办公室垃圾回收机器人,该专利包括底座、套筒、底槽、放置筒和挡板;所述套筒置于底座的上方,且套筒位于底座上方偏向后端的位置,底座的下方四角均安装有滚轮,且滚轮为四个,所述底槽开设在套筒下方的底座内部,底槽上方的底座表面开设有贯穿口,贯穿口与底槽内部连通,且套筒通过贯穿口插置入底槽内,底槽的内部横向设置有托板。本发明通过在套筒内部下方设置有带有左存放室和右存放室的放置筒,其上方的套筒内部设置可转动挡板,且其底部安装有电磁铁,在挡板转动并配合电磁铁的作用下,可以将金属钉、回形针等垃圾与纸张垃圾分离,方便之后的分离回收,同时称重功能方便判断垃圾存放量。
3、现有技术的办公室废品回收机器人在使用的过程中,采取一次性收取收纳的方式,将不同的废品堆积在一起,且无法计量废品的重量进而二次回收。因此现有技术的废品回收机器人的实用效果不佳,亟待改进。
技术实现思路
1、本实用新型的目的在于提供一种零散废旧物品回收机器人,本装置针对现有技术的办公室机器人的技术问题,提出了分类称量组件和显示控制组件,增加了装置的计量、分类的效果,提高了装置的应用范围,以解决上述背景技术中提出的问题。
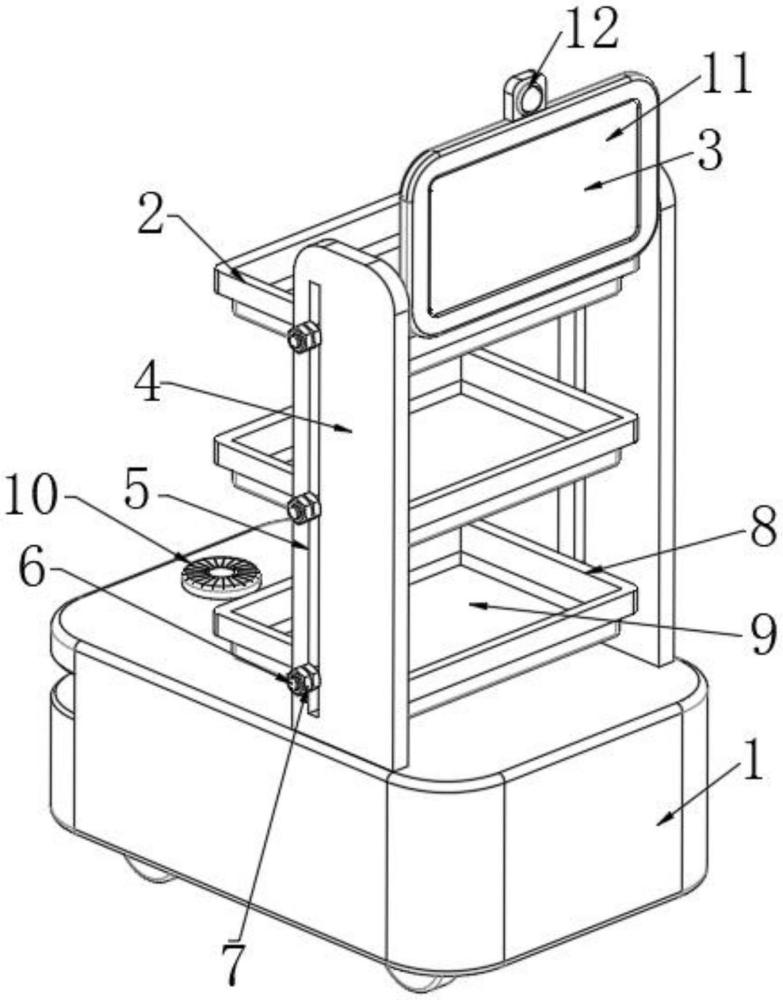
2、本实用新型的技术方案是:一种零散废旧物品回收机器人,包括车厢,还包括:
3、分类称量组件,分类称量组件包括安装在车厢两侧的架板,架板的侧边设置有导槽,导槽的内部滑动安装有限位杆,限位杆的端部螺纹安装有自锁螺栓,限位杆的中间部位安装有托盘,托盘的底部安装有电子秤,分类称量组件还包括安装在车厢尾部的喇叭;
4、显示控制组件,显示控制组件包括安装在架板一侧的显示触摸屏,显示触摸屏的背部连通有集成控制器终端,显示触摸屏的一侧连通有前置镜头,喇叭和电子秤分别与集成控制器终端接通。
5、进一步的技术方案,分类称量组件分为上中下三层,分别为纸张层、金属件层和其他件层。
6、进一步的技术方案,集成控制器终端由控制器plc、微机和单片机集成组装。
7、进一步的技术方案,车厢的背部设置有三角台,三角台的侧边安装有后置镜头,后置镜头与集成控制器终端接通。
8、进一步的技术方案,车厢的底部分别滚动安装有移动轮和方向轮,车厢内部设置有电驱,电驱分别与移动轮和方向轮连接。
9、本实用新型通过改进在此提供一种零散废旧物品回收机器人,与现有技术相比,具有如下改进及优点。本装置针对现有技术的办公室废品回收机器人存在的技术缺陷,提出了相应的解决方案,具有以下技术优势:
10、本装置针对现有技术的办公室机器人的技术问题,提出了分类称量组件和显示控制组件,增加了装置的计量、分类的效果,提高了装置的应用范围。其中分类称量组件将不同的废品分为三挡,分别为废纸、金属废品和其他废品,不同的废品经过归类,便于后续的回收。我们在托盘的底部设置了电子秤,通过电子秤计量废品的质量,并将数据输出至集成控制器终端部位,然后控制喇叭播报废品的质量,实现了实时监测的效果。此外,由于不同分类档次的废品占用空间不同,需要调节其空挡,因此我们在架板侧边开设了导槽,通过限位杆在导槽内部滑动、自锁螺栓锁紧的方式实现托盘高度的调节。
11、显示控制组件不仅可以显示计量重量的数值,还能通过集成控制器终端控制前置镜头和后置镜头进行实时监测,然后通过终端控制底部的电驱和滑轮,避免出现碰撞的现象,实现了安全操作的效果。
技术特征:
1.一种零散废旧物品回收机器人,包括车厢(1),其特征在于,还包括:
2.根据权利要求1所述的一种零散废旧物品回收机器人,其特征在于:所述分类称量组件(2)分为上中下三层,分别为纸张层、金属件层和其他件层。
3.根据权利要求1所述的一种零散废旧物品回收机器人,其特征在于:所述集成控制器终端(13)由控制器plc、微机和单片机集成组装。
4.根据权利要求1所述的一种零散废旧物品回收机器人,其特征在于:所述车厢(1)的背部设置有三角台(14),所述三角台(14)的侧边安装有后置镜头(15),所述后置镜头(15)与集成控制器终端(13)接通。
5.根据权利要求1所述的一种零散废旧物品回收机器人,其特征在于:所述车厢(1)的底部分别滚动安装有移动轮(16)和方向轮(17),所述车厢(1)内部设置有电驱,所述电驱分别与移动轮(16)和方向轮(17)连接。
技术总结
本技术涉及机器人技术领域,具体是一种零散废旧物品回收机器人,包括车厢,还包括:分类称量组件,分类称量组件包括安装在车厢两侧的架板,架板的侧边设置有导槽,导槽的内部滑动安装有限位杆,限位杆的端部螺纹安装有自锁螺栓,限位杆的中间部位安装有托盘,托盘的底部安装有电子秤,分类称量组件还包括安装在车厢尾部的喇叭;其中分类称量组件将不同的废品分为三档,分别为废纸、金属废品和其他废品,不同的废品经过归类,便于后续的回收。我们在托盘的底部设置了电子秤,通过电子秤计量废品的质量,并将数据输出至集成控制器终端部位,然后控制喇叭播报废品的质量,实现了实时监测的效果。
技术研发人员:陈云
受保护的技术使用者:安徽碳月行物联科技有限公司
技术研发日:20230712
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!