一种基于全场定位的仓库运输机器人
本技术涉及仓库运输机器人,尤其涉及一种基于全场定位的仓库运输机器人。
背景技术:
1、随着自动化热潮的推进及人工智能的普及,如今对于工业自动化的需求愈加迫切。目前小型仓库由于其有限的资金和技术,半自动化程度极低,对于大量机械性的劳动依旧需要人工完成。传统小型储物仓库对于中大型货物的存放与取出一般采用人工驾驶运输车的方式,其人力成本高,工作效率较低,昼夜工作效率相差大,相对于传统的储物仓库,自动化仓库的储存量能提高5-10倍,能够在不增加库房面积的前提下显著提高存储货物能力,同时保持良好的货物处理能力,自动化仓库的实现,势必以自动化程度高的智能运输机器人取代传统人工存放。
2、目前存在大量关于仓库机器人的视觉识别与路径规划的理论成果,对于设计出的仓库机器人,更多以小型固定架执行机构,机器人通过抓取的方式来存取货物;现有的仓库机器人更多服务于小型货物的整理和存储,仓库机器人对重量大的大、中型货物无法使用固定架夹取;导致仓库机器人对货物的尺寸和质量存在着很大的局限,同时存放高度也有一定的限制。因此需要提供一种基于全场定位的仓库运输机器人,解决搬运大型货物的问题,同时提高摆放机器人高度,更高效的利用仓储空间。
技术实现思路
1、本实用新型的目的在于提供一种基于全场定位的仓库运输机器人,解决现有仓库机器人对货物的尺寸和质量存在的局限以及限制存放高度的技术问题。本实用新型能够提高小型仓库的自动化程度和覆盖率,提高存储与出货效率,实现大、中、小型货物均能自动化,降低工作误差,减少工作中的人力成本和安全风险。
2、为了实现上述目的,本实用新型采用的技术方案如下:
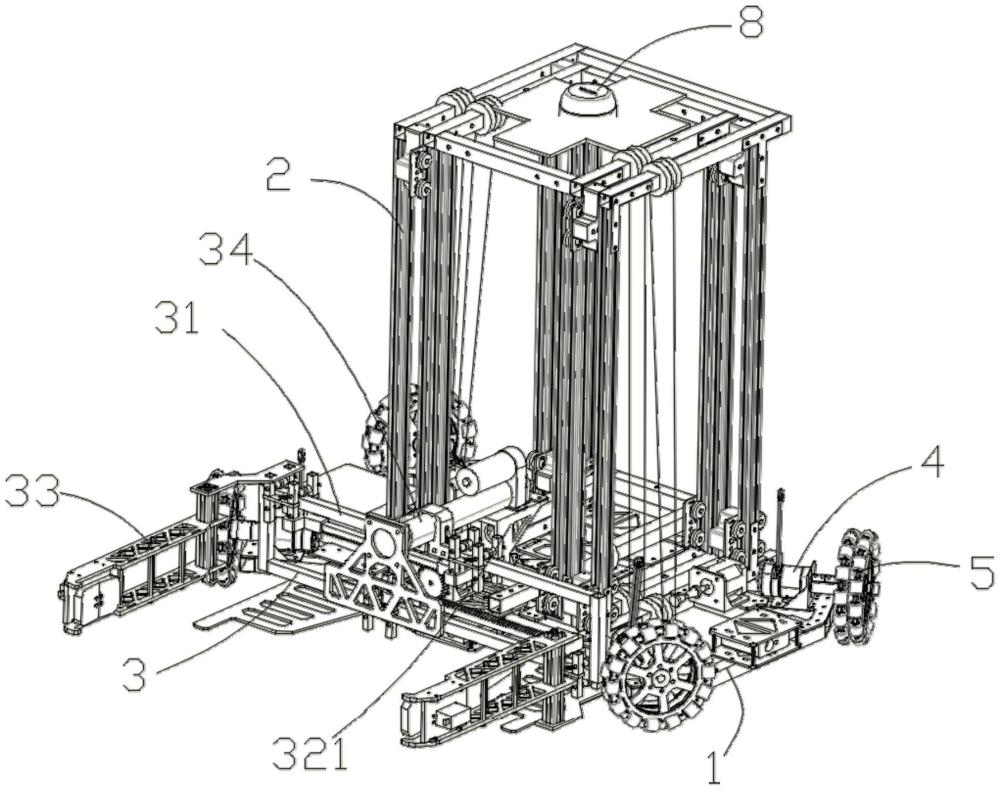
3、一种基于全场定位的仓库运输机器人,包括底盘、升降装置和夹取装置,升降装置固定连接在底盘上,夹取装置设置在底盘的前面,且夹取装置固定连接在升降装置上,底盘上分别设置有四个底盘电机,底盘电机的输出轴朝外并各连接有一个全向轮,底盘的底部设置有全场定位装置,全场定位装置上设置有两个小全向轮,升降装置的顶端设置有激光雷达。
4、进一步地,底盘的中间设置有定位装置架,全场定位装置设置在定位装置架的下方,全场定位装置与定位装置架通过螺栓固定连接,底盘的形状设置为长方形,底盘的四个角分别设置有底盘电机支架,底盘电机支架与底盘通过螺栓固定连接,底盘电机设置在底盘电机支架上,底盘前面的两个底盘电机支架的一侧分别设置有夹取装置支撑板,夹取装置支撑板分别通过螺栓固定连接在底盘上,夹取装置支撑板之间设置有夹取装置支撑块,夹取装置支撑块通过螺栓固定连接在底盘上。
5、进一步地,升降装置与底盘通过螺栓固定连接,升降装置包括内层框架、外层框架和升降电机,升降电机通过钢索分别与内层框架和外层框架依次连接,外层框架的底端与底盘通过螺栓固定连接,外层框架与内层框架通过滑车滑动连接。
6、进一步地,升降电机通过升降电机支架与底盘固定连接,升降电机支架与底盘通过螺栓固定连接,且升降电机支架分别设置在底盘后面的两个底盘电机支架的一侧,升降电机的输出端连接有钢索卷套,钢索的一端固定连接在钢索卷套上,钢索的另一端依次绕过外层框架和内层框架后固定连接在夹取装置上。
7、进一步地,外层框架包括外层上框架、外层下框架和外层立柱,外层立柱的两端分别通过角铁与外层上框架和外层下框架固定连接,外层上框架的左右两边分别设置有钢索限位件,钢索绕在钢索限位件上,外层下框架通过螺栓固定连接在底盘上,外层立柱的两侧设置有滑槽。
8、进一步地,内层框架包括内层上框架、内层下框架和内层立柱,内层立柱的两端分别通过角铁与内层上框架和内层下框架固定连接,滑车分别设置在内层下框架与内层立柱连接处的外侧,滑车的轮子分别设置在外层立柱两侧的滑槽内,内层上框架和内层下框架的左右两边分别设置有钢索限位件,钢索绕在钢索限位件上,内层上框架的顶端设置有激光雷达支架,激光雷达固定连接在激光雷达支架的中间,内层立柱的两侧设置有滑槽。
9、进一步地,夹取装置包括固定架、连接架和机械臂,连接架设置在内层下框架上,固定架的中部与连接架通过连接杆固定连接,机械臂分别设置在固定架的两端,固定架上设置有齿轮、上齿条和下齿条,齿轮分别与上齿条和下齿条啮合连接。
10、进一步地,连接架与内层下框架通过滑车滑动连接,四个滑车分别设置在连接架的左右两侧,滑车的轮子分别设置在内层立柱两侧的滑槽内,连接架的左右两边分别设置有钢索限位件,连接架上设置有支架,支架通过连接杆与固定架固定连接,支架上设置有驱动电机,驱动电机的输出轴通过联轴器与齿轮连接,齿轮的前面设置有货物挡板,货物挡板固定连接在连接杆的一端。
11、进一步地,固定架包括第一横杆、第二横杆、第一竖杆和第二竖杆,第一横杆的两端分别与第一竖杆和第二竖杆的一端焊接固定,第二横杆的两端分别与第一竖杆和第二竖杆的另一端焊接固定,第一横杆的中部通过连接件与连接杆固定连接,第一横杆上设置有两个上滑动连接限位件,上滑动连接限位件与第一横杆滑动连接,上齿条设置在上滑动连接限位件之间,第二横杆上设置有两个下滑动连接限位件,下滑动连接限位件与第二横杆滑动连接,下齿条设置在下滑动连接限位件之间。
12、进一步地,机械臂包括连接板、固定杆和机械爪,连接板的一端分别与上滑动连接限位件或下滑动连接限位件焊接固定,连接板的另一端与固定杆的一端焊接固定,机械爪的一端套设在固定杆的另一端;机械爪包括上机械爪、下机械爪和六角柱,上机械爪和下机械爪对称设置,若干根六角柱通过焊接固定连接在上机械爪和下机械爪之间的中部,上机械爪和下机械爪的一端套设在固定杆上,上机械爪和下机械爪的另一端之间设置有机械爪垫板。
13、本实用新型由于采用了上述技术方案,具有以下有益效果:
14、1、本实用新型的底盘采用全向轮,相比传统的码垛车的车轮,能够实现原地任意角度和方向的旋转与前进,极大提高存取工作灵活性,减小工作范围,优化工作路径,能够更高效的利用和安排仓库有限的空间资源。
15、2、本实用新型的升降装置采用双级抬升,通过升降电机提供动力回拉钢索,与钢索固定连接的夹取装置通过夹取装置上的滑车在内框架的滑槽内上下滑动,当夹取装置到达内框架的顶端时,内框架与夹取装置通过内框架上的滑车在外框架的滑槽内上下滑动,相比传统码垛车的货物抬升方式,能够实现不同高度货物的存储与夹取,能够在同样高度的机构下提高一倍的升降高度。
16、3、本实用新型的夹取装置上的驱动电机驱动齿轮运转,带动齿轮啮合的上齿条和下齿条左右运动,从而带动机械爪向内或向外运动,改变机械爪之间的距离,相比传统的小型夹爪,提高了夹取稳定性和夹取货物尺寸范围;机械爪上与货物接触部位法人机械爪垫板使用表面多小突起的弹性材料,增大与货物的接触摩擦力,有效防止滑脱,减小了货物表面的破损。
17、4、本实用新型在升降装置的顶端设置有激光雷达,能够实时反馈仓库运输机器人行驶路径上的工况,若出现行人、大型异物或其他障碍物,激光雷达会检测后输出给仓库运输机器人信号,仓库运输机器人对障碍物绕行。
18、5、本实用新型提供的仓库运输机器人灵活性高,能够实现原地任意角度和方向的旋转与前进,能够保证在相同机构高度下,使升降装置上的夹取装置抬升到原本高度的两倍,提高货物的存放高度,旨在提高小型仓库的自动化程度和覆盖率,提高货物存储与出货效率,实现大中小型货物均能自动化,降低工作误差,减少工作中的人力成本和安全风险。
- 还没有人留言评论。精彩留言会获得点赞!