一种拆垛机器人夹具及拆垛机器人的制作方法
本技术涉及一种拆垛机器人夹具及拆垛机器人,属于机器人夹具。
背景技术:
1、刹车盘是实现汽车制动的关键部件,刹车盘砂芯是用于铸造刹车盘的材料,由铸造砂、粘结剂等按照一定的比例混合后再利用制芯机制造而成,在生产过程中通过码垛的方式叠放在一起存放,能够节省存放空间,通常在码垛时,为了增加码垛的稳定性,且防止砂芯变形,利用垫板将相邻层之间的刹车盘砂芯隔开。
2、在铸造生产线上,需要将砂芯拆垛后逐个放至砂箱的模腔中,现有的拆垛方式一般采用人工拆垛的方式将码垛一层一层的拆解,这不仅需要耗费大量的人工,且无法实现自动化流水线生产。
技术实现思路
1、本实用新型的目的在于提供一种新的技术方案以改善或解决如上所述的现有技术中存在的技术问题。
2、本实用新型提供的技术方案如下:一种拆垛机器人夹具,包括主连接板、用于与机器人连接的连接法兰、工件夹持机构以及吸盘组件,所述连接法兰安装在所述主连接板上端,所述工件夹持机构安装在所述主连接板下端,所述工件夹持机构用于抓取并转移工件,所述吸盘组件安装在所述主连接板的一侧,所述吸盘组件用于吸附并转移垫板。
3、进一步的,所述吸盘组件包括吸盘连接板和安装在吸盘连接板上的一个或多个吸盘,所述吸盘连接板竖直安装在所述主连接板的一侧。
4、进一步的,所述工件夹持机构包括安装座、夹爪气缸和多个夹爪,所述安装座一端安装在所述主连接板上,所述安装座的另一端与所述夹爪气缸连接,多个所述夹爪沿周向均匀分布在所述夹爪气缸上,且所述夹爪能够沿径向滑动。
5、进一步的,所述夹爪气缸上设有多条滑道,所述滑道的数量与所述夹爪的数量相同,所述滑道内设有滑块,多个所述夹爪通过滑块分别安装在各自的滑道内,所述夹爪能够跟随滑块沿着所述滑道往复滑动。
6、进一步的,所述吸盘为真空吸盘。
7、本实用新型还提供了一种拆垛机器人,包括机械臂,还包括所述的拆垛机器人夹具,所述的拆垛机器人夹具通过所述连接法兰安装在所述机械臂的末端。
8、进一步的,所述机械臂能够带动所述拆垛机器人夹具绕所述连接法兰的中心轴线旋转。
9、进一步的,所述机械臂能够带动所述拆垛机器人夹具翻转。
10、本实用新型提供的技术方案,与现有技术相比,具有以下有益效果:本实用新型的拆垛机器人夹具通过工件夹持机构能够将码放在一起的砂芯从上向下一层一层的拆解,当上一层的砂芯被拆解移走之后,所述吸盘组件能够吸附垫板并将其转移至其它位置,方便对垫板下方的砂芯继续拆解分离。
技术特征:
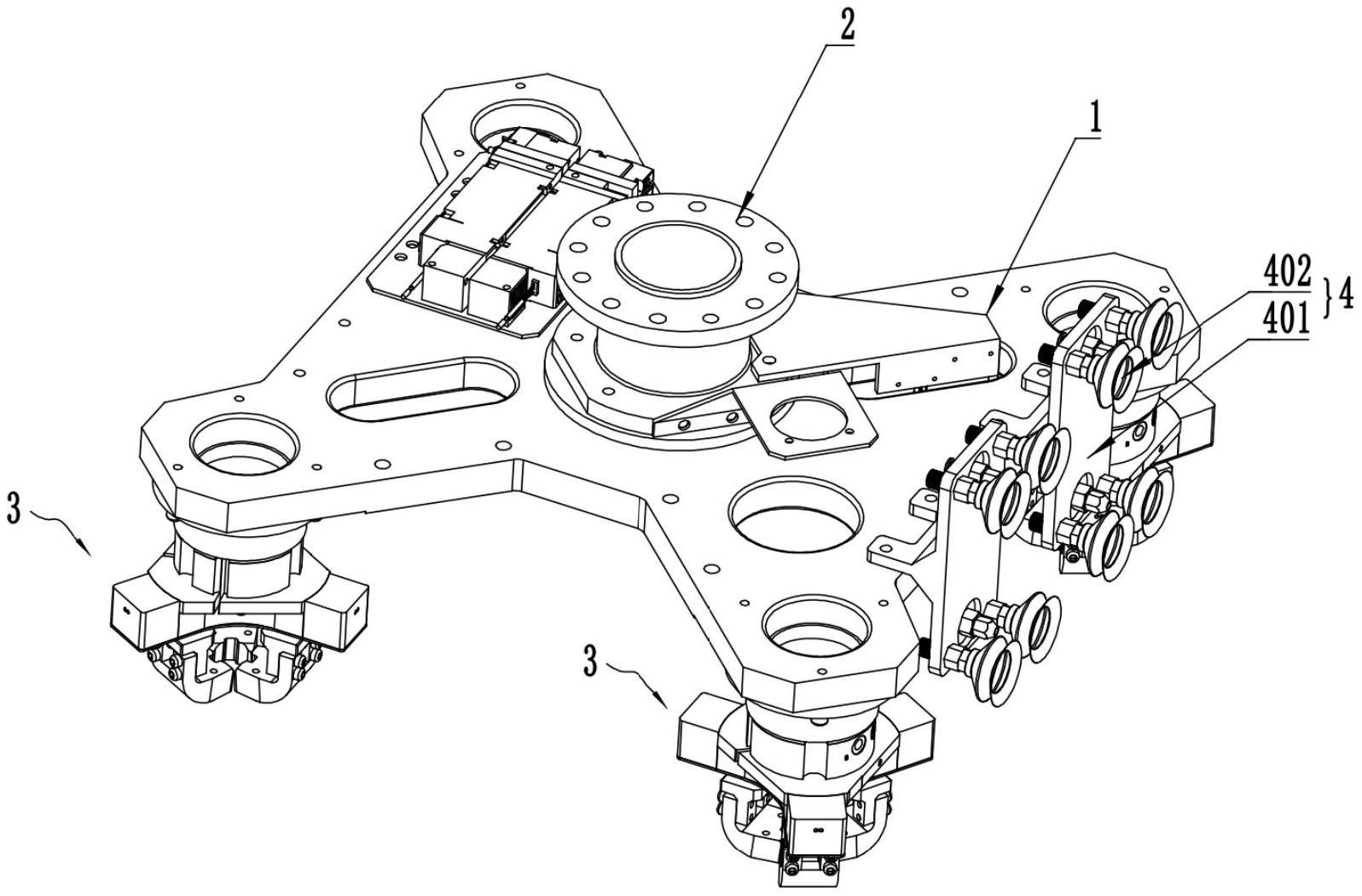
1.一种拆垛机器人夹具,其特征在于,包括主连接板(1)、用于与机器人连接的连接法兰(2)、工件夹持机构(3)以及吸盘组件(4),所述连接法兰(2)安装在所述主连接板(1)上端,所述工件夹持机构(3)安装在所述主连接板(1)下端,所述工件夹持机构(3)用于抓取并转移工件,所述吸盘组件(4)安装在所述主连接板(1)的一侧,所述吸盘组件(4)用于吸附并转移垫板(5)。
2.根据权利要求1所述的拆垛机器人夹具,其特征在于,所述吸盘组件(4)包括吸盘连接板(401)和安装在吸盘连接板(401)上的一个或多个吸盘,所述吸盘连接板(401)竖直安装在所述主连接板(1)的一侧。
3.根据权利要求1所述的拆垛机器人夹具,其特征在于,所述工件夹持机构(3)包括安装座(301)、夹爪气缸(302)和多个夹爪(303),所述安装座(301)一端安装在所述主连接板(1)上,所述安装座(301)的另一端与所述夹爪气缸(302)连接,多个所述夹爪(303)沿周向均匀分布在所述夹爪气缸(302)上,且所述夹爪(303)能够沿径向滑动。
4.根据权利要求3所述的拆垛机器人夹具,其特征在于,所述夹爪气缸(302)上设有多条滑道,所述滑道的数量与所述夹爪(303)的数量相同,所述滑道内设有滑块,多个所述夹爪(303)通过滑块分别安装在各自的滑道内,所述夹爪(303)能够跟随滑块沿着所述滑道往复滑动。
5.根据权利要求2所述的拆垛机器人夹具,其特征在于,所述吸盘为真空吸盘(402)。
6.一种拆垛机器人,其特征在于,包括机械臂,还包括如权利要求1-5任意一项所述的拆垛机器人夹具,所述的拆垛机器人夹具通过所述连接法兰(2)安装在所述机械臂的末端。
7.根据权利要求6所述的拆垛机器人,其特征在于,所述机械臂能够带动所述拆垛机器人夹具绕所述连接法兰(2)的中心轴线旋转。
8.根据权利要求6或7所述的拆垛机器人,其特征在于,所述机械臂能够带动所述拆垛机器人夹具翻转。
技术总结
本技术涉及一种拆垛机器人夹具,属于机器人夹具技术领域。包括主连接板、连接法兰、工件夹持机构以及吸盘组件,所述连接法兰安装在所述主连接板上端,所述工件夹持机构安装在所述主连接板下端,所述工件夹持机构用于抓取并转移工件,所述吸盘组件安装在所述主连接板的一侧,所述吸盘组件用于吸附并转移垫板,所述吸盘组件包括吸盘连接板和安装在吸盘连接板上的一个或多个吸盘,所述吸盘连接板竖直安装在所述主连接板的一侧。本技术的拆垛机器人夹具通过工件夹持机构能够将码放在一起的砂芯从上向下一层一层的拆解,当上一层的砂芯被拆解移走之后,所述吸盘组件能够吸附垫板并将其转移至其它位置,方便对垫板下方的砂芯继续拆解分离。
技术研发人员:陈召召,郭绪剑,辛博伦
受保护的技术使用者:烟台胜地汽车零部件制造有限公司
技术研发日:20230718
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!