自动化机械抓手搬运装置的制作方法
本技术涉及机械设备,具体为自动化机械抓手搬运装置。
背景技术:
1、目前,随着自动化机械设备在生产加工领域的不断进步,越来越多的设备都能实现更加全面自动化的机械作业,同时,机械抓手的应用也越来越广泛,机械抓手通过模拟人手和手臂的功能来实现机械式的抓取和调节,可以代替人工取放物体,机械手臂的受力程度可以根据其所要抓取的物体来设计,较人工抓取,机械手臂能够抓取体积更大、重量更重的物体,降低了人工劳动强度,也因为机械手臂的灵活应用,市面上出现了自动化机械抓手搬运装置来整体搬运物及货物。
2、现今,针对体积较大、搬运路程较近的货物,通常会在两点之间设立桁架,桁架上安装与货物型号和规格相适应的机械手臂,通过机械手臂的抓取和移动来实现货物的搬运工作,但是,大多数的此类自动化机械抓手搬运装置都只能实现横向或竖向的调节,无法根据货物的放置角度来调整机械抓手的倾斜角度和方向,使用起来具有一定的局限性。
3、例如专利公开号cn113954060a,公开了一种自动化机械抓手搬运机,涉及机械设备领域,包括支撑机架、放置架、两个安装板、两个机械抓手和控制箱;支撑机架顶部水平设置放置架,放置架左右两端设置与放置架滑动连接的两个安装板,每个安装板表面均滑动设置有一个机械抓手,控制箱设置在放置架顶部,内部设置有平移结构,平移结构内设置有与机械抓手连接的升降装置。通过电机控制平移结构带动机械抓手进行位置水平位置移动,同时通过丝杆电机推动两个机械抓手上下移动,通过副电机控制第一齿轮带动转动抓手将模具抓取,投放到运输车中,有益于减轻人工劳动量,提高工作效率,定位准确,自动化程度高等特点,通过两个抓手方便同时对多个模具线进行脱模和搬运工作;
4、该专利中的自动化机械抓手搬运装置虽然可以调节高度和移动方向,但是货物始终保持在装置的正中间位置移动,无法根据实际需求来调整机械抓手的角度,不能适用于不同的工作环境,使用起来存在一定的局限性,且一次只能抓取单向的货物,搬运效率也不是很高。
技术实现思路
1、针对现有技术的不足,本实用新型提供了自动化机械抓手搬运装置,解决了无法根据实际需求来调整机械抓手的角度,搬运效率也不是很高的问题。
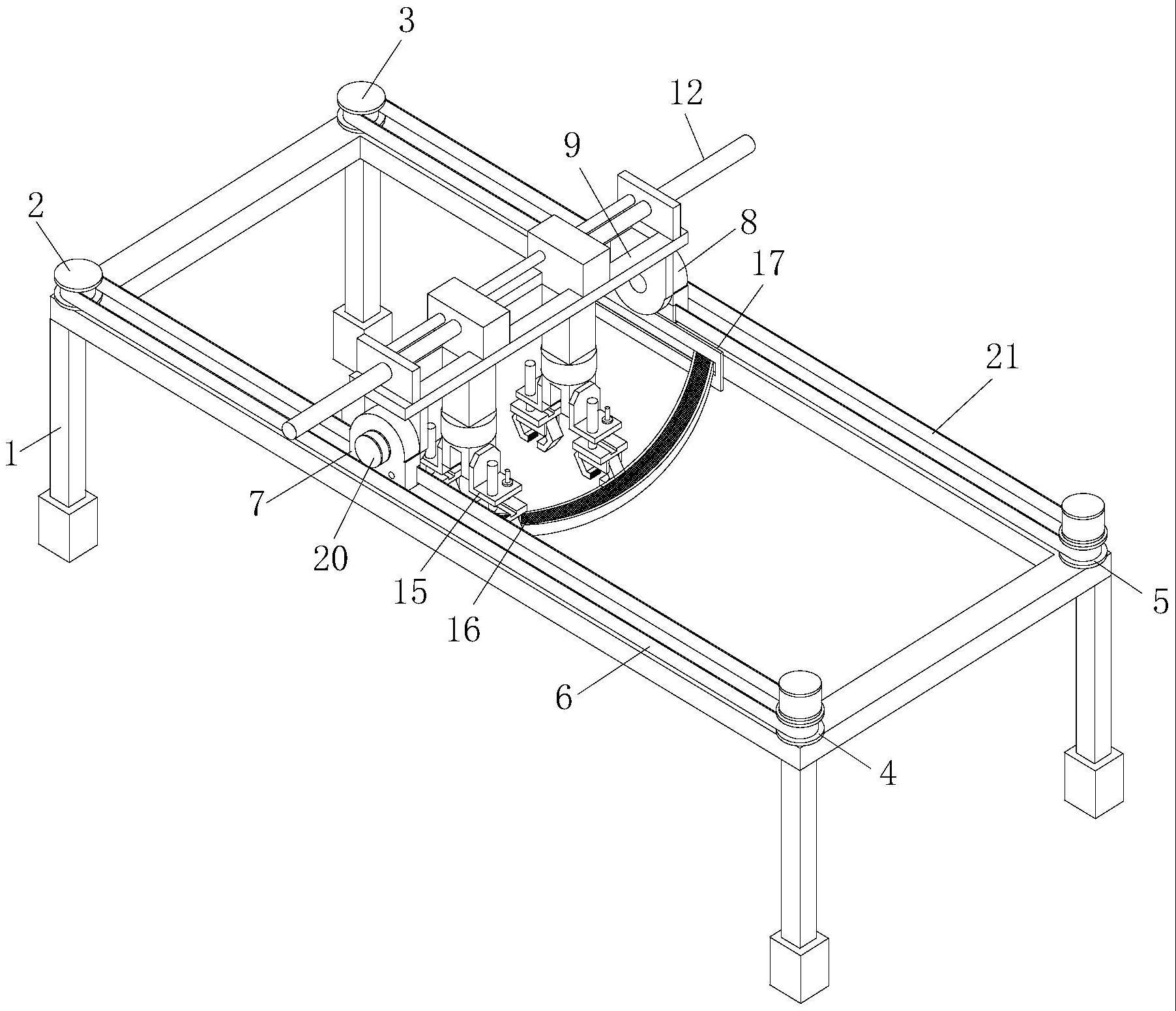
2、为实现以上目的,本实用新型通过以下技术方案予以实现:自动化机械抓手搬运装置,包括方形的固定架,所述固定架上端四个顶角处依次设置有第一皮带轮、第二皮带轮、第三皮带轮和第四皮带轮,所述第三皮带轮和第四皮带轮上分别固定安装有第一电机,第一传动带的两端分别套设于所述第一皮带轮和所述第三皮带轮的外壁,第二传动带的两端分别套设于所述第二皮带轮和所述第四皮带轮的外壁,所述固定架上端面并且沿着所述第一传动带内侧固定安装有第一滑座,所述固定架上端面并且沿着所述第二传动带内侧固定安装有第二滑座,所述第一滑座和所述第二滑座上分别安装有第二电机,两个所述第二电机的输出轴分别连接有转动板,两个所述转动板之间安装有连接架,所述连接架上安装有横向调节组件,所述横向调节组件下侧依次连接有液压缸和抓手夹持组件,所述第一滑座和所述第二滑座内侧分别固定安装有连接板,所述连接板上设置有伸缩防护网,所述伸缩防护网一侧固定连接有第一固定板,所述伸缩防护网另一侧固定连接有第二固定板,每个所述连接板上安装有防护网移动组件。
3、优选的,所述横向调节组件包括并排设置于所述连接架上端面的第一滑块和第二滑块,所述第一滑块和所述第二滑块外侧分别固定安装有第一电动推杆。
4、进一步的,所述连接架上表面两端分别固定安装有第三固定板,所述第一电动推杆的一端固定安装在所述第三固定板上。
5、进一步的,两个所述第三固定板之间固定连接有第一导向杆,所述第一导向杆贯穿所述第一滑块和所述第二滑块。
6、优选的,所述抓手夹持组件包括电机盒,所述电机盒内部设置有第三电机,所述第三电机的输出轴设置有转动块。
7、进一步的,所述转动块一侧固定安装有第一连接件,所述转动块另一侧固定安装有第二连接件,所述第一连接件上固定安装有第二电动推杆,所述第二电动推杆固定端安装在所述第一连接件上表面,所述第二电动推杆活动端贯穿所述第一连接件,所述第二连接件上固定安装有第三电动推杆,所述第三电动推杆固定端安装在所述第二连接件上表面,所述第三电动推杆活动端贯穿所述第二连接件。
8、进一步的,所述第二电动推杆和所述第三电动推杆的活动端分别固定安装有升降板,每个所述升降板上固定连接有第二导向杆,两个所述第二导向杆分别贯穿所述第一连接件和所述第二连接件。
9、进一步的,所述升降板下表面固定安装有连接块,所述连接块上通过轴安装有电动抓夹。
10、优选的,所述防护网移动组件包括两个第一支撑架,两个所述第一支撑架分别对应安装在两个所述连接板上。
11、进一步的,所述第一支撑架外侧固定安装有第四电机,所述第四电机的输出轴连接有螺纹杆,所述螺纹杆端部设置有移动块,所述移动块固定安装在所述第二固定板的内侧。
12、本实用新型的有益效果是:
13、1、该自动化机械抓手搬运装置,通过设置横向调节组件、第一滑座、第二滑座、第二电机、转动板和连接架,横向调节组件可以根据货物所在的位置进行横向移动调整,在第二电机运行过程中转动板会跟随第二电机一起转动,从而带动连接架以及其上侧的横向调节组件转动,使得横向调节组件所连接的液压缸和抓手夹持组件的倾斜角度能够发生改变,从而对抓手夹持组件所抓取的倾斜角度进行调整,以便更好地适用于现场实际状况,同时,抓手夹持组件前后各设置有一组,可以同时夹持和搬运两组物体,从而节省了货物搬运的次数和时间,提高了搬运效率,更符合市场需求。
14、2、该自动化机械抓手搬运装置,通过设置连接板、伸缩防护网和防护网移动组件,在抓手夹持组件工作的过程中,防护网移动组件可以将伸缩防护网收起来,从而避免抓手夹持组件的移动受到阻碍,当抓手夹持组件夹取好货物并准备输送的时候,防护网移动组件可以将伸缩防护网撑开,使得货物的底部能够完全设置在伸缩防护网上侧,可以避免移动过程中货物不慎掉落的危险,伸缩防护网可以阻拦并缓冲货物下降的冲击力,避免下侧的工作人员受到损伤,同时也能进一步减小货物的损坏程度,降低损失。
技术特征:
1.自动化机械抓手搬运装置,包括方形的固定架(1),其特征在于:所述固定架(1)上端四个顶角处依次设置有第一皮带轮(2)、第二皮带轮(3)、第三皮带轮(4)和第四皮带轮(5),所述第三皮带轮(4)和第四皮带轮(5)上分别固定安装有第一电机,第一传动带(6)的两端分别套设于所述第一皮带轮(2)和所述第三皮带轮(4)的外壁,第二传动带(21)的两端分别套设于所述第二皮带轮(3)和所述第四皮带轮(5)的外壁,所述固定架(1)上端面并且沿着所述第一传动带(6)内侧固定安装有第一滑座(7),所述固定架(1)上端面并且沿着所述第二传动带(21)内侧固定安装有第二滑座(8),所述第一滑座(7)和所述第二滑座(8)上分别安装有第二电机(20),两个所述第二电机(20)的输出轴分别连接有转动板(11),两个所述转动板(11)之间安装有连接架(10),所述连接架(10)上安装有横向调节组件(12),所述横向调节组件(12)下侧依次连接有液压缸(14)和抓手夹持组件(15),所述第一滑座(7)和所述第二滑座(8)内侧分别固定安装有连接板(13),所述连接板(13)上设置有伸缩防护网(16),所述伸缩防护网(16)一侧固定连接有第一固定板(18),所述伸缩防护网(16)另一侧固定连接有第二固定板(19),每个所述连接板(13)上安装有防护网移动组件(17)。
2.根据权利要求1所述的自动化机械抓手搬运装置,其特征在于:所述横向调节组件(12)包括并排设置于所述连接架(10)上端面的第一滑块(1201)和第二滑块(1202),所述第一滑块(1201)和所述第二滑块(1202)外测分别固定安装有第一电动推杆(1203)。
3.根据权利要求2所述的自动化机械抓手搬运装置,其特征在于:所述连接架(10)上表面两端分别固定安装有第三固定板(9),所述第一电动推杆(1203)的一端固定安装在所述第三固定板(9)上。
4.根据权利要求3所述的自动化机械抓手搬运装置,其特征在于:两个所述第三固定板(9)之间固定连接有第一导向杆(1204),所述第一导向杆(1204)贯穿所述第一滑块(1201)和所述第二滑块(1202)。
5.根据权利要求1所述的自动化机械抓手搬运装置,其特征在于:所述抓手夹持组件(15)包括电机盒(1501),所述电机盒(1501)内部设置有第三电机,所述第三电机的输出轴设置有转动块(1502)。
6.根据权利要求5所述的自动化机械抓手搬运装置,其特征在于:所述转动块(1502)一侧固定安装有第一连接件(1503),所述转动块(1502)另一侧固定安装有第二连接件(1504),所述第一连接件(1503)上固定安装有第二电动推杆(1505),所述第二电动推杆(1505)固定端安装在所述第一连接件(1503)上表面,所述第二电动推杆(1505)活动端贯穿所述第一连接件(1503),所述第二连接件(1504)上固定安装有第三电动推杆(1509),所述第三电动推杆(1509)固定端安装在所述第二连接件(1504)上表面,所述第三电动推杆(1509)活动端贯穿所述第二连接件(1504)。
7.根据权利要求6所述的自动化机械抓手搬运装置,其特征在于:所述第二电动推杆(1505)和所述第三电动推杆(1509)的活动端分别固定安装有升降板(1507),每个所述升降板(1507)上固定连接有第二导向杆(1506),两个所述第二导向杆(1506)分别贯穿所述第一连接件(1503)和所述第二连接件(1504)。
8.根据权利要求7所述的自动化机械抓手搬运装置,其特征在于:所述升降板(1507)下表面固定安装有连接块,所述连接块上通过轴安装有电动抓夹(1508)。
9.根据权利要求1所述的自动化机械抓手搬运装置,其特征在于:所述防护网移动组件(17)包括两个第一支撑架(1701),两个所述第一支撑架(1701)分别对应安装在两个所述连接板(13)上。
10.根据权利要求9所述的自动化机械抓手搬运装置,其特征在于:所述第一支撑架(1701)外侧固定安装有第四电机(1703),所述第四电机(1703)的输出轴连接有螺纹杆(1704),所述螺纹杆(1704)端部设置有移动块(1702),所述移动块(1702)固定安装在所述第二固定板(19)的内侧。
技术总结
本技术公开了自动化机械抓手搬运装置,本技术涉及机械设备技术领域。该自动化机械抓手搬运装置,通过设置横向调节组件、第一滑座、第二滑座、第二电机、转动板和连接架,横向调节组件可以根据货物所在的位置进行横向移动调整,在第二电机运行过程中转动板会跟随第二电机一起转动,从而带动连接架以及其上侧的横向调节组件转动,使得横向调节组件所连接的液压缸和抓手夹持组件的倾斜角度能够发生改变,从而对抓手夹持组件所抓取的倾斜角度进行调整,以便更好地适用于现场实际状况,同时,抓手夹持组件前后各设置有一组,可以同时夹持和搬运两组物体,从而节省了货物搬运的次数和时间,提高了搬运效率,更符合市场需求。
技术研发人员:农朝军
受保护的技术使用者:西安汇星机械科技有限公司
技术研发日:20230724
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!