一种用于吊装索具安装的设备及方法与流程
本发明涉及吊装索具领域,尤其涉及一种用于吊装索具安装的设备及方法。
背景技术:
1、在吊装索具是吊机或吊物主体与被吊物体之间的连接件,也是涵盖吊索和吊具的统称;金属吊索具主要有:钢丝绳吊索类、链条吊索类、吊装带吊索索、卸扣类、吊钩类、吊钳类、磁性吊具类等;合成纤维吊索具主要有:以锦纶、丙纶、涤纶、高强高模聚乙烯纤维为材料生产的绳类和带类吊索具。
2、在吊装索具安装的过程中,通常需要将用于吊装索具对其进行升高到安装位置再对其进行安装,且大部分的吊装索具安装的过程中需要人为地将吊装索具安装在固定位置,导致了在安装的过程中存在一定风险的问题,从而降低了用于吊装索具安装的设备的安全性。
技术实现思路
1、为此,本发明提供一种用于吊装索具安装的设备及方法,可以解决吊装索具安装的设备安全性低的问题。
2、为实现上述目的,本发明提供一种用于吊装索具安装的设备,包括:
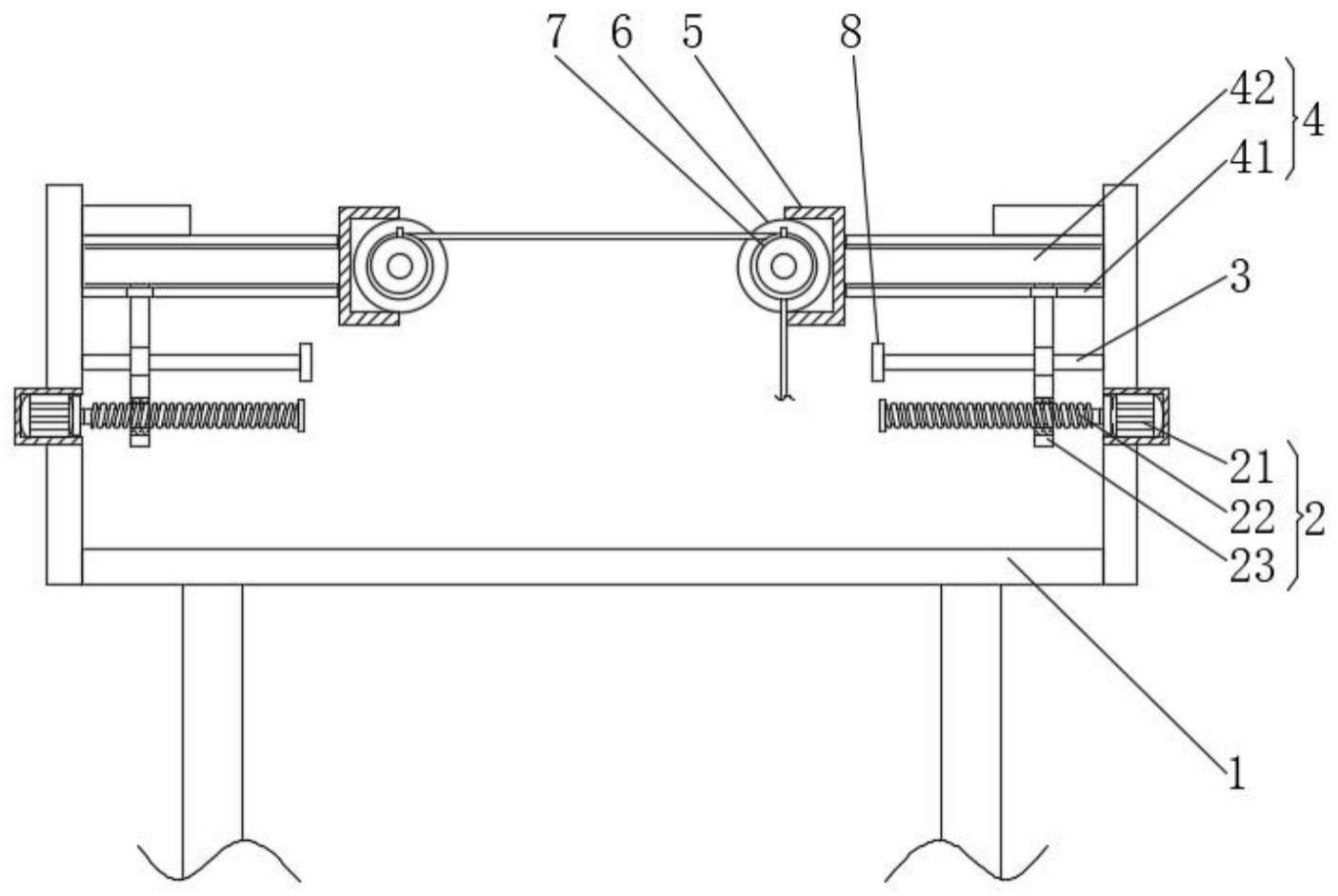
3、支撑架,设置有两个支撑侧板,设定为第一支撑侧板和第二支撑侧板;
4、在所述第一支撑侧板上设置有伸缩机构,用以带动设置在所述伸缩机构远离第一支撑侧板一端的索具组件沿着伸缩机构的伸缩方向移动;
5、检测器,用以对索具组件的实际重量进行检测,得到实际重量;
6、调平机构设置在所述伸缩机构的下方,用以通过滑杆所在的位置来支撑伸缩机构的平衡状态;
7、中控模块,分别与检测器和调平机构连接,用以根据所述索具组件的实际重量调整所述调平机构中的滑杆在所述伸缩机构下的位置,以使滑杆的支撑点能够与索具组件的重量和位置匹配。
8、进一步地,所述中控模块包括设置单元、比较单元和调整单元;
9、所述设置单元用以预先设置有第一标准重量w1和第二标准重量w2,且w1小于w2;
10、所述比较单元用以将所述索具组件的实际重量w分别与所述第一标准重量w1和所述第二标准重量w2进行比较;
11、若实际重量w≤第一标准重量w1,则所述调整单元无需对伸缩机构的伸缩长度进行调整;
12、若第一标准重量w1<实际重量≤第二标准重量w2,则所述调整单元将所述伸缩机构的伸缩长度缩短为原始伸缩长度的4/5;
13、若实际重量>第二标准重量w2,则所述调整单元将所述伸缩机构的伸缩长度缩短为原始伸缩长度的1/2。
14、进一步地,还包括检测模块,伸缩机构的伸缩长度进行调整之后,所述检测模块用以检测伸缩杆的实际长度,设置单元内还设置有第一长度范围区间、第二长度范围区间和第三长度范围区间,且第一长度范围区间内的每个长度值均大于第二长度范围区间内的各长度值大于第三长度范围区间内的各长度值;
15、当伸缩杆的实际长度处于第一长度范围区间时,所述索具组件处于第一状态;
16、当伸缩杆的实际长度处于第二长度范围区间时,所述索具组件处于第二状态;
17、当伸缩杆的实际长度处于第三长度范围区间时,所述索具组件处于第三状态。
18、进一步地,所述第一调平机构包括第一电机、螺杆和滑杆,所述第一电机固定设置在第一侧板上,所述第一电机的输出轴用以与螺杆固定连接,用以带动螺杆转动,所述滑杆的一端与所述螺杆螺接,用以将螺杆的转动转化为滑杆在水平方向上的左右移动,以根据所述伸缩杆的长度以及索具组件的重量调整第一电机的运行参数以确定滑杆在伸缩机构的位置。
19、进一步地,所述中控模块在根据索具组件的重量调整第一电机的运行参数以确定滑杆在伸缩机构的位置时,当伸缩杆的实际长度处于第一长度范围区间时,设定伸缩杆的长度为l11,同时实际重量>第二标准重量w2,则将滑杆的位置设定在距离索具组件1/3×l11的范围内;
20、设定伸缩杆的长度为l11,同时第二标准重量w2≥实际重量>第一标准重量w1,则将滑杆的位置设定在距离索具组件2/3×l11至1/3×l11的范围内;
21、设定伸缩杆的长度为l11,同时实际重量≤第一标准重量w1,则将滑杆的位置设定在靠近第一侧板的1/3×l11的范围内。
22、进一步地,还包括识别模块,用以对伸缩杆的半径进行识别,获取伸缩杆的实际半径,所述中控模块预先设置有第一标准半径r1和第二标准半径r2,且r1小于r2;
23、若所述伸缩杆的实际半径小于等于第一标准半径r1,则在进行滑杆位置的设定时,将伸缩杆的长度采用第一系数k1进行修正;
24、若所述伸缩杆的实际半径小于等于第二标准半径r2且大于第一标准半径r1,则在进行滑杆位置的设定时,将伸缩杆的长度采用第二系数k2进行修正,其中k1大于k2;
25、若所述伸缩杆的实际半径大于第二标准半径r2,则在进行滑杆位置的设定时,无需对伸缩杆的长度进行修正。
26、进一步地,中控模块将伸缩杆的长度采用第一系数k1进行修正,设定采用第一系数k1修正后的伸缩杆的长度为l10=l11×(1-k1);
27、所述中控模块将伸缩杆的长度采用第二系数k2进行修正,设定采用第二系数进行修正后的伸缩杆的长度为l20=l11×(1-k2)。
28、另一方面,本发明还提供一种基于如上所述的用于吊装索具安装的设备的用于吊装索具安装的方法,包括:
29、设置支撑架,所述支撑架包括两个支撑侧板,设定为第一支撑侧板和第二支撑侧板;
30、在所述第一支撑侧板上设置有伸缩机构,用以带动设置在所述伸缩机构远离第一支撑侧板一端的索具组件沿着伸缩机构的伸缩方向移动;
31、对索具组件的实际重量进行检测,得到实际重量;
32、通过滑杆所在的位置来支撑伸缩机构的平衡状态;
33、根据所述索具组件的实际重量调整所述调平机构中的滑杆在所述伸缩机构下的位置,以使滑杆的支撑点能够与索具组件的重量和位置匹配。
34、进一步地,所述根据所述索具组件的实际重量调整所述调平机构中的滑杆在所述伸缩机构下的位置包括:
35、预先设置有第一标准重量w1和第二标准重量w2,且w1小于w2;
36、将所述索具组件的实际重量w分别与所述第一标准重量w1和所述第二标准重量w2进行比较;
37、若实际重量w≤第一标准重量w1,则调整单元无需对伸缩机构的伸缩长度进行调整;
38、若第一标准重量w1<实际重量≤第二标准重量w2,则所述调整单元将所述伸缩机构的伸缩长度缩短为原始伸缩长度的4/5;
39、若实际重量>第二标准重量w2,则所述调整单元将所述伸缩机构的伸缩长度缩短为原始伸缩长度的1/2。
40、进一步地,还包括:对伸缩杆的半径进行识别,获取伸缩杆的实际半径,所述中控模块预先设置有第一标准半径r1和第二标准半径r2,且r1小于r2;
41、若所述伸缩杆的实际半径小于等于第一标准半径r1,则在进行滑杆位置的设定时,将伸缩杆的长度采用第一系数k1进行修正;
42、若所述伸缩杆的实际半径小于等于第二标准半径r2且大于第一标准半径r1,则在进行滑杆位置的设定时,将伸缩杆的长度采用第二系数k2进行修正,其中k1大于k2;
43、若所述伸缩杆的实际半径大于第二标准半径r2,则在进行滑杆位置的设定时,无需对伸缩杆的长度进行修正;
44、将伸缩杆的长度采用第一系数k1进行修正,设定采用第一系数k1修正后的伸缩杆的长度为l10=l11×(1-k1);
45、将伸缩杆的长度采用第二系数k2进行修正,设定采用第二系数进行修正后的伸缩杆的长度为l20=l11×(1-k2)。
46、与现有技术相比,本发明的有益效果在于,通过设置检测器,对索具组件的实时重量进行检测,并根据检测结果调整滑杆对伸缩机构的支撑位置,以使得滑杆的支撑点与索具组件的重量匹配,使得伸缩机构能够均衡地承受索具组件的重量,大大提高了该设备的安全性。
47、尤其,通过对索具组件的实时重量进行检测,在实际应用中,由于第一索具组件和第二索具组件之间是存在重量关联的,本发明实施例通过确定实际重量的所在重量范围区间,确定不同的伸缩长度调整策略,使得索具组件在伸缩机构的末端更为稳固,提高在使用过程中的安全性。
48、尤其,通过检测伸缩杆的实际长度,以确定伸缩杆所在的长度范围区间,以确定索具组件在使用过程中的状态信息,实现对索具组件状态的精准判定。
49、尤其,通过对第一调平机构的部件进行限定,采用第一电机、螺杆和滑杆配合的方式实现了通过第一电机的转动来带动螺杆进行转动,且螺杆和滑杆之间螺接,在螺杆转动的过程中就实现了滑杆在螺杆延伸方向的上移动,进而实现滑杆对伸缩机构不同位置的支撑,大大提高了索具组件的稳定性和安全性。
50、尤其,通过对伸缩杆的长度进行确定,并根据索具组件的实际重量所在的范围,确定滑杆对伸缩机构的支撑位置,并且在重量较重时,为了提高稳定性,则需要在靠近索具组件的位置进行支撑,当重量小一点的时候,则支撑位置可以远离索具组件,实现对滑杆位置的动态调整,大大提高了索具组件在安装过程中的安全性。
- 还没有人留言评论。精彩留言会获得点赞!