一种多规格叉车式转运AGV的制作方法
本技术涉及agv,尤其是一种多规格叉车式转运agv。
背景技术:
1、开关柜的转运需要用到agv叉车,由于开关柜的规格不同,导致其外廓尺寸也不同,传统的agv叉车仅能对开关柜的下部进行承载和托举,并沿预设路线转运;由于开关柜放置在叉车托臂上后,左右侧缺乏限位,因此需要人工额外固定,使得开关柜的转运变的困难、费力。
技术实现思路
1、本申请针对上述现有技术中的缺点,提供一种多规格叉车式转运agv,通过抱夹机构对开关柜的两侧进行软限位,同时由于抱夹机构的夹持板通过弹簧可压缩,因此能够适配不同规格宽度的开关柜,下部的托举机构辅助举升,从而保证开关柜在移动、举升过程中能够避免晃动。
2、本实用新型所采用的技术方案如下:
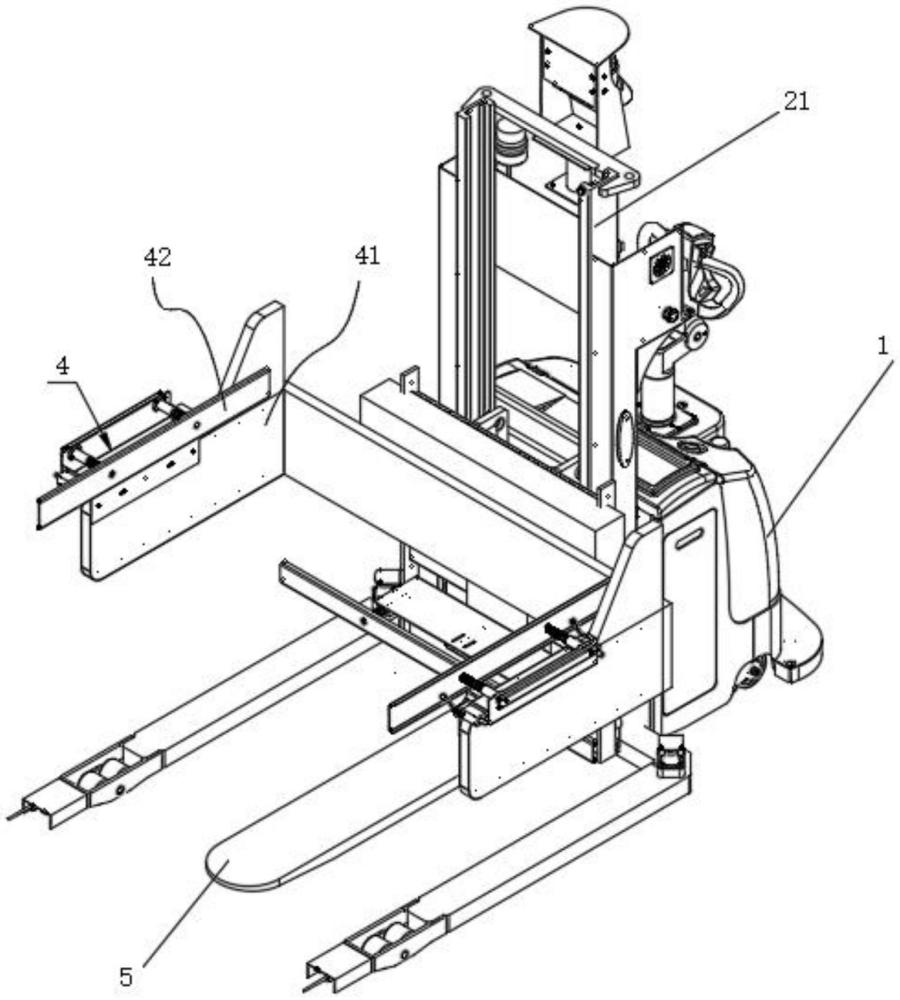
3、一种多规格叉车式转运agv,包括agv叉车,所述agv叉车与货物相对的前端面设置第一架体以及第二架体,所述第一架体上设置用于限位货物两侧的抱夹机构,所述第二架体上设置用于托举货物底面的托举机构。
4、进一步的,所述agv叉车为堆垛式agv叉车。
5、进一步的,所述第一架体以及第二架体均滑动设置于堆垛式agv叉车本体的滑轨上,且第一架体位于第二架体的上部。
6、进一步的,所述抱夹机构包括设置于第一架体上的承载板,所述承载板具有相对的两个承载面,承载面的内侧各设置一块夹持板,两夹持板之间构成夹持货物的夹持空间,所述夹持板与承载板之间设置弹性件以及导向组件,所述夹持板与承载板之间通过弹性件存储弹性力,通过导向组件使得夹持板与承载板之间的距离可调节。
7、进一步的,所述托举机构包括设置在第二架体中部的货叉。
8、进一步的,所述弹性件为弹簧。
9、进一步的,所述导向组件为滑动端子以及连杆,所述连杆本体上开设滑槽,所述连杆的一端转动连接于夹持板,所述滑动端子滑动设置于滑槽内,且所述滑槽与滑动端子之间可转动连接。
10、进一步的,所述夹持板为柔性材料板。
11、本实用新型的有益效果如下:
12、1)相比现有技术,本实用新型提供的agv叉车配置有抱夹机构,通过抱夹机构对其两侧进行软限位,同时由于抱夹机构的夹持板通过弹簧可压缩,因此能够适配不同规格宽度的开关柜,下部的托举机构辅助举升,从而保证开关柜在移动、举升过程中能够避免晃动。
13、2)抱夹机构的导向机构由带滑槽的连杆、以及滑动端子组成,使得夹持板相对承载板可导向压缩的同时,能够适应下倾、上倾一定角度的调节。
14、3)针对堆垛式agv叉车,抱夹机构以及托举机构均滑动设置在堆垛agv本体的滑轨上,能够在举升过程时进行跟随限位。
技术特征:
1.一种多规格叉车式转运agv,包括agv叉车(1),其特征在于:所述agv叉车(1)与货物相对的前端面设置第一架体(2)以及第二架体(3),所述第一架体(2)上设置用于限位货物两侧的抱夹机构(4),所述第二架体(3)上设置用于托举货物底面的托举机构(5)。
2.如权利要求1所述的一种多规格叉车式转运agv,其特征在于:所述agv叉车(1)为堆垛式agv叉车。
3.如权利要求2所述的一种多规格叉车式转运agv,其特征在于:所述第一架体(2)以及第二架体(3)均滑动设置于堆垛式agv叉车(1)本体的滑轨(21)上,且第一架体(2)位于第二架体(3)的上部。
4.如权利要求1所述的一种多规格叉车式转运agv,其特征在于:所述抱夹机构(4)包括设置于第一架体(2)上的承载板(41),所述承载板(41)具有相对的两个承载面,承载面的内侧各设置一块夹持板(42),两夹持板(42)之间构成夹持货物的夹持空间,所述夹持板(42)与承载板(41)之间设置弹性件(43)以及导向组件(44),所述夹持板(42)与承载板(41)之间通过弹性件(43)存储弹性力,通过导向组件(44)使得夹持板(42)与承载板(41)之间的距离可调节。
5.如权利要求1所述的一种多规格叉车式转运agv,其特征在于:所述托举机构(5)包括设置在第二架体(3)中部的货叉。
6.如权利要求4所述的一种多规格叉车式转运agv,其特征在于:所述弹性件(43)为弹簧。
7.如权利要求4所述的一种多规格叉车式转运agv,其特征在于:所述导向组件(44)为滑动端子(441)以及连杆(442),所述连杆(442)本体上开设滑槽(443),所述连杆(442)的一端转动连接于夹持板(42),所述滑动端子(441)滑动设置于滑槽(443)内,且所述滑槽(443)与滑动端子(441)之间可转动连接。
8.如权利要求4所述的一种多规格叉车式转运agv,其特征在于:所述夹持板(42)为柔性材料板。
技术总结
本技术公开了一种多规格叉车式转运AGV,旨在解决传统AGV叉车仅能对开关柜下部进行承载和托举,左右侧缺乏限位的问题。本技术提供一种多规格叉车式转运AGV,通过抱夹机构对开关柜的两侧进行软限位,同时由于抱夹机构的夹持板通过弹簧可压缩,因此能够适配不同规格宽度的开关柜,抱夹机构的导向机构由带滑槽的连杆、以及滑动端子组成,使得夹持板相对承载板可导向压缩的同时,能够适应下倾、上倾一定角度的调节,下部的托举机构辅助举升,从而保证开关柜在移动、举升过程中能够避免晃动。
技术研发人员:孙浩,李山山,王文凯,邵葳,袁升驰,王玉青,丁浩
受保护的技术使用者:江苏森蓝智能系统有限公司
技术研发日:20230829
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!