一种基于后装毫米波雷达的装车校准方法与流程
本发明涉及一种装车校准方法,尤其涉及一种基于后装毫米波雷达的装车校准方法。
背景技术:
1、目前针对毫米波雷达的校准基本都是基于整车厂提供的保险杠数据出厂前就进行校准,或者是没有保险杠的校准。在保险杠影响未知的后装市场基于带保险杠的校准还存在一定技术难度,因此,有必要提供一种基于后装毫米波雷达的装车校准方法。
技术实现思路
1、本发明所要解决的技术问题是提供一种基于后装毫米波雷达的装车校准方法,能够装有保险杠的情况下,对毫米波雷达进行校准,操作简单,校准精度高,易于推广应用。
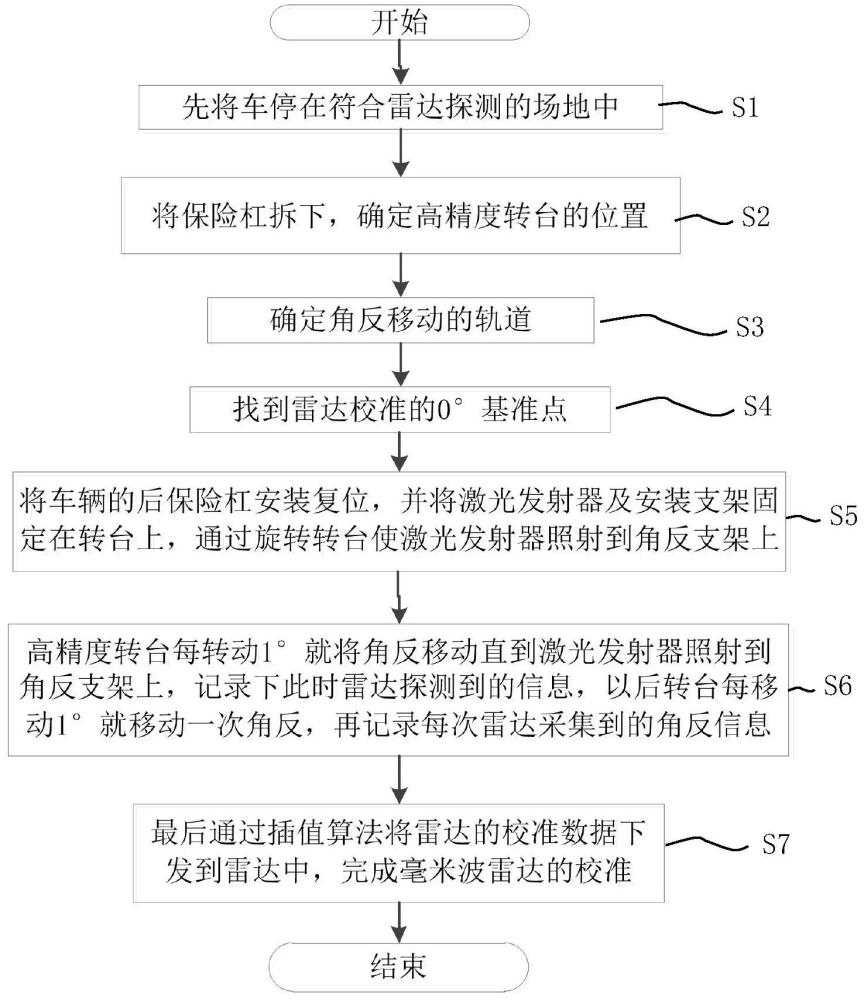
2、本发明为解决上述技术问题而采用的技术方案是提供一种基于后装毫米波雷达的装车校准方法,包括如下步骤:s1)先将车停在符合雷达探测的场地中;s2)将保险杠拆下,确定高精度转台的位置;s3)确定角反移动的轨道;s4)找到雷达校准的0°基准点;s5)将车辆的后保险杠安装复位,并将激光发射器及安装支架固定在转台上,通过旋转转台使激光发射器照射到角反支架上;s6)高精度转台每转动1°就将角反移动直到激光发射器照射到角反支架上,记录下此时雷达探测到的信息,以后转台每移动1°就移动一次角反,再记录每次雷达采集到的角反信息;s7)最后通过插值算法将雷达的校准数据下发到雷达中,完成毫米波雷达的校准。
3、进一步地,所述步骤s1将车停在一个以后角雷达为圆心,半径为7m,圆心角大于雷达探测水平角的扇形内。
4、进一步地,所述步骤s2按如下方式确定高精度转台的位置:将铅锤顺着角雷达表面的几何中心点向下放线,并将高精度转台旋转的几何中心点对准铅锤的中心点。
5、进一步地,所述步骤s3包括:以转台的中心点为圆点,利用皮尺画一个半径为5m,圆心角大于雷达水平探测角度的扇形。
6、进一步地,所述步骤s4包括:将激光发射器的尾部几何中心点和雷达的几何中心重叠,然后移动角反使激光发射器照射到角反的中心。
7、本发明对比现有技术有如下的有益效果:本发明提供的基于后装毫米波雷达的装车校准方法,能够装有保险杠的情况下,对毫米波雷达进行校准;通过较为简单低廉的工具和较简单的校准环境就可以得到较高的校准精度,具有推广性高,易普及的优势。
技术特征:
1.一种基于后装毫米波雷达的装车校准方法,其特征在于,包括如下步骤:
2.如权利要求1所述的基于后装毫米波雷达的装车校准方法,其特征在于,所述步骤s1将车停在一个以后角雷达为圆心,半径为7m,圆心角大于雷达探测水平角的扇形内。
3.如权利要求1所述的基于后装毫米波雷达的装车校准方法,其特征在于,所述步骤s2按如下方式确定高精度转台的位置:将铅锤顺着角雷达表面的几何中心点向下放线,并将高精度转台旋转的几何中心点对准铅锤的中心点。
4.如权利要求1所述的基于后装毫米波雷达的装车校准方法,其特征在于,所述步骤s3包括:以转台的中心点为圆点,利用皮尺画一个半径为5m,圆心角大于雷达水平探测角度的扇形。
5.如权利要求1所述的基于后装毫米波雷达的装车校准方法,其特征在于,所述步骤s4包括:将激光发射器的尾部几何中心点和雷达的几何中心重叠,然后移动角反使激光发射器照射到角反的中心。
技术总结
本发明公开了一种基于后装毫米波雷达的装车校准方法,包括:S1)先将车停在符合雷达探测的场地中;S2)将保险杠拆下,确定高精度转台的位置;S3)确定角反移动的轨道;S4)找到雷达校准的0°基准点;S5)将车辆的后保险杠安装复位,并将激光发射器及安装支架固定在转台上,通过旋转转台使激光发射器照射到角反支架上;S6)高精度转台每转动1°就将角反移动直到激光发射器照射到角反支架上,记录下此时雷达探测到的信息,每移动1°就移动一次角反记录每次雷达采集到的角反信息;S7)最后通过插值算法将雷达的校准数据下发到雷达中。本发明能够装有保险杠的情况下,对毫米波雷达进行校准,操作简单,校准精度高,易于推广应用。
技术研发人员:赵杰,雷阳,闫斌,李珉熙,彭泽勇
受保护的技术使用者:立晟智能科技(成都)有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!