一种土建工程用墙体平整度检测系统及检测方法与流程
本发明涉及墙体平整度检测,具体涉及一种土建工程用墙体平整度检测系统及检测方法。
背景技术:
1、在建筑施工过程中,墙面平整度是影响房间内美观和施工质量的关键因素之一。因此,对房间内墙面的平整度进行检测是必不可少的质量控制环节。传统的墙面平整度检测主要采用人工使用水平尺、靠尺等工具逐一测量墙面的平整度,操作繁琐,费时费力。在大型建筑工程中,墙面数量众多,检测工作量大,人工检测方法难以满足高效施工的需求,同时,人工检测的精度和可靠性有限。检测人员的技能水平、经验差异以及操作疲劳等因素都会影响检测结果的准确性,为了提高建筑施工的质量和效率,开发自动化墙面平整度检测技术具有重要的意义。
技术实现思路
1、本发明实施例提供了一种土建工程用墙体平整度检测系统及检测方法,通过在无人机上搭载深度相机,同时根据建筑物构建其飞行检测路线,实现了进行自动检测的效果,不仅减少了人工的使用而且检测精度高,同时检测效率也得到了极大的提升。
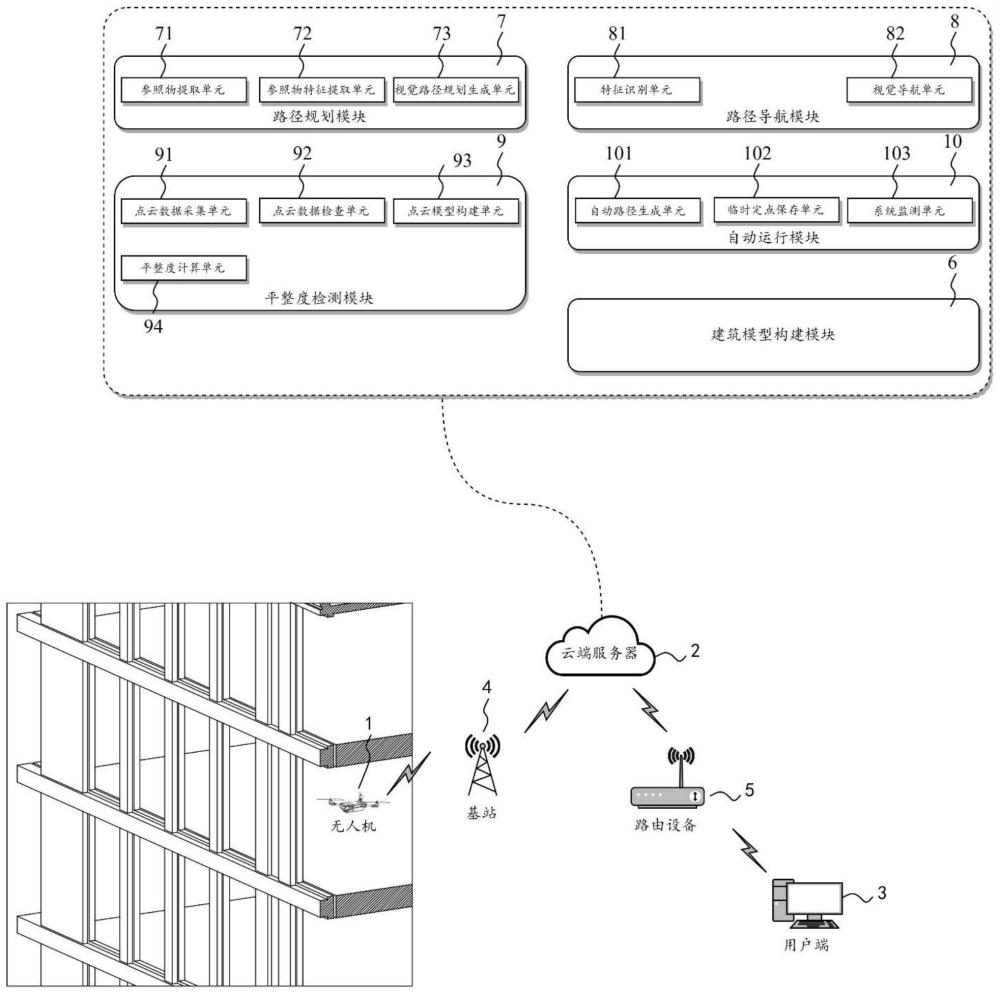
2、一种土建工程用墙体平整度检测系统,包括无人机和与之通信连接的云端服务器,所述无人机搭载有用于获取深度图像的深度相机,并将获取的深度图像上传至所述云端服务器,所述云端服务器设置有建筑模型构建模块、路径规划模块、路径导航模块和平整度检测模块;
3、所述建筑模型构建模块适于根据建筑物的施工参数构建其三维模型;
4、所述路径规划模块适于在建筑三维模型内制定所述无人机的行径路线;
5、所述路径导航模块适于根据行径路线以及上传的深度图像对所述无人机进行导航;
6、所述平整度检测模块适于根据上传的上传的深度图像对建筑物的墙面平整度进行检测。
7、进一步的,所述路径规划模块包括参照物提取单元、参照物特征提取单元和视觉路径规划生成单元;
8、所述参照物提取单元适于在建筑三维模型中选定出若干个进行视觉参照的部位;
9、所述参照物特征提取单元适于对上述视觉参照部位进行特征识别提取和存储,构成视觉参照特征数据库;
10、所述视觉路径规划生成单元适于将上述视觉参照部位进行连接,构成行径路线。
11、进一步的,所述路径导航模块包括特征识别单元和视觉导航单元;
12、所述特征识别单元适于根据行径路线识别行径路线中的视觉参照部位;
13、所述视觉导航单元适于根据识别出的视觉参照部位对无人机的飞行路线进行引导。
14、进一步的,行径路线包括所述无人机在建筑物房间外的飞行路线以及在房间内的飞行路线,其中,在房间内的飞行路线中还包括若干个墙面平整度检查点。
15、进一步的,所述平整度检测模块包括点云数据采集单元、点云数据检查单元、点云模型构建单元和平整度计算单元;
16、所述点云数据采集单元适于将上传的深度图像转换为点云数据;
17、所述点云数据检查单元适于在无人机飞行至各个房间内的墙面平整度检查点后,对上述获取点云数据的完整度进行检查,在识别到有缺失的区域时,控制无人机重新对该区域进行深度图像的采集;
18、所述点云模型构建单元适于根据通过检查后的点云数据构建墙面的三维模型;
19、所述平整度计算单元适于根据墙面的三维模型计算墙面的平整度。
20、进一步的,一面墙壁对应有至少一个墙面平整度检查点,墙面平整度检查点重合在飞行路线中。
21、进一步的,所述服务器中还设置有自动运行模块,所述自动运行模块包括自动路径生成单元、临时定点保存单元和系统监测单元;
22、所述系统监测单元适于监测所述无人机的电量参数;
23、所述无人机在根据行径路线飞行过程中,若所述无人机的剩余电量仅够返航至起始点时,临时定点保存单元对当前的位置进行临时保存,得到临时定位点;
24、所述自动路径生成单元适于根据行径路线构建临时返航路线并控制所述无人机返航充电;以及在无人机的电量补充完成后,根据临时返航路线控制所述无人机飞行至临时定位点继续工作并删除临时数据。
25、第二方面,本发明实施例提供一种土建工程用墙体平整度检测方法,包括以下步骤:
26、根据建筑物的施工图纸构建出建筑物的三维模型,并从三维模型中提取出若干个视觉参照部位;
27、自动识别出建筑物房间内的墙面,并根据每个墙面的参数制定出至少一个墙面平整度检查点;
28、将上述视觉参照部位以及平整度检查点按照顺序依次连接构成行径路线;
29、通过用户端控制所述无人机按照行径路线飞行,并在无人机进行房间的墙面平整度检查点后自动获取墙面的深度图像并转化为点云数据;
30、通过点云数据构建墙面的三维模型,并计算墙面的平整度;
31、将计算的结果发回至所述用户端供用户进行查看。
32、本发明实施例提供的上述技术方案的有益效果至少包括:
33、本发明通过构建出建筑物的三维模型后从三维模型中提取出若干个视觉参照部位作为无人机的飞行路线,同时自动识别出建筑物房间内的墙面,并根据每个墙面的参数制定出墙面平整度检查点与飞行路线相连接形成行径路线,在检测过程中,无人机根据行径路线飞行即可完成全部的房间内墙面的平整度检测工作,不仅检测速度快而且检测精度高,有效减少了的人工的使用提升了检测效率。
34、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
35、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
技术特征:
1.一种土建工程用墙体平整度检测系统,包括无人机(1)和与之通信连接的云端服务器(2),所述无人机(1)搭载有用于获取深度图像的深度相机(11),并将获取的深度图像上传至所述云端服务器(2),其特征在于,所述云端服务器(2)设置有建筑模型构建模块(6)、路径规划模块(7)、路径导航模块(8)和平整度检测模块(9);
2.如权利要求1所述的一种土建工程用墙体平整度检测系统,其特征在于,所述路径规划模块(7)包括参照物提取单元(71)、参照物特征提取单元(72)和视觉路径规划生成单元(73);
3.如权利要求2所述的一种土建工程用墙体平整度检测系统,其特征在于,所述路径导航模块(8)包括特征识别单元(81)和视觉导航单元(82);
4.如权利要求3所述的一种土建工程用墙体平整度检测系统,其特征在于,行径路线包括所述无人机(1)在建筑物房间外的飞行路线以及在房间内的飞行路线,其中,在房间内的飞行路线中还包括若干个墙面平整度检查点。
5.如权利要求4所述的一种土建工程用墙体平整度检测系统,其特征在于,所述平整度检测模块(9)包括点云数据采集单元(91)、点云数据检查单元(92)、点云模型构建单元(93)和平整度计算单元(94);
6.如权利要求4所述的一种土建工程用墙体平整度检测系统,其特征在于,一面墙壁对应有至少一个墙面平整度检查点,墙面平整度检查点重合在飞行路线中。
7.如权利要求1~6任一项所述的一种土建工程用墙体平整度检测系统,其特征在于,所述服务器中还设置有自动运行模块(10),所述自动运行模块(10)包括自动路径生成单元(101)、临时定点保存单元(102)和系统监测单元(103);
8.一种土建工程用墙体平整度检测方法,应用如权利要求1~6任一项所述的一种土建工程用墙体平整度检测系统,其特征在于,包括以下步骤:
技术总结
一种土建工程用墙体平整度检测系统及检测方法,涉及墙体平整度检测技术领域,包括无人机和云端服务器,无人机搭载有用于获取深度图像的深度相机,并将获取的深度图像上传至云端服务器,云端服务器设置有建筑模型构建模块、路径规划模块、路径导航模块和平整度检测模块,本发明通过构建出建筑物的三维模型后从三维模型中提取出若干个视觉参照部位作为无人机的飞行路线,同时自动识别出建筑物房间内的墙面,并根据每个墙面的参数制定出墙面平整度检查点与飞行路线相连接形成行径路线,在检测过程中,无人机根据行径路线飞行即可完成全部的房间内墙面的平整度检测工作,不仅检测速度快而且检测精度高,有效减少了的人工的使用提升了检测效率。
技术研发人员:谢瑞,胡键,姬永铁,李波,茹幸,张聪,宛佳俊
受保护的技术使用者:中国建筑第二工程局有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!