一种高速码垛系统的制作方法
本技术涉及冲压件堆放领域,具体是一种高速码垛系统。
背景技术:
1、现有的冲压件自动码垛技术在速度上存在局限性,因其一般采用一抓一放或两抓一放的方式,因此多适用于速度较慢的大型零件,对于一模多件的高速冲压线,特别是多工位和级进模冲压线,目前尚不存在具有良好性价比的自动码垛解决方案,如果要达到同样的码垛速度,需要数倍于本方案的空间和设备预算。
技术实现思路
1、本实用新型公开了一种高速码垛系统,使用单条物流线路达到高速码垛的效果。
2、为了解决上述技术问题,本实用新型采用的技术方案是:
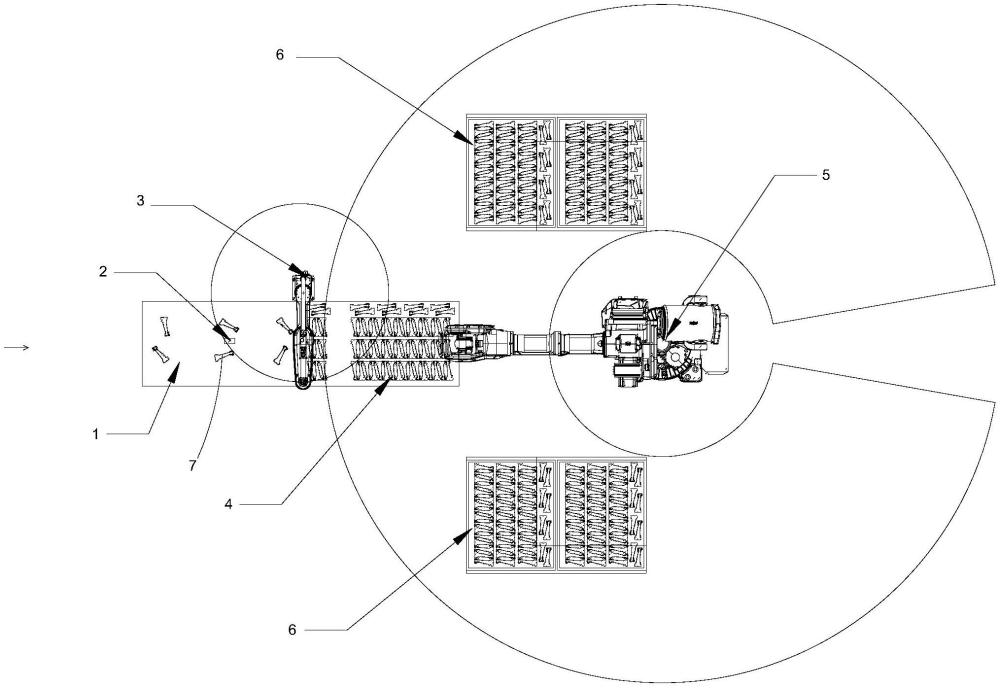
3、本实用新型公开一种高速码垛系统,包括下料皮带机,下料皮带机的进料处设有定位装置,下料皮带机的前端设有摆放机器人,下料皮带机的末端设有码垛皮带,码垛皮带的前端设有码垛机器人,码垛机器人的两侧设有料箱。
4、进一步的,定位装置为视觉定位相机。
5、进一步的,下料皮带机的皮带的一端与伺服电机连接,步进距离为l1。
6、进一步的,码垛皮带与伺服电机连接,码垛皮带的步进距离为l2。
7、进一步的,码垛皮带位于下料皮带机的上端或后端。
8、进一步的,摆放机器人和码垛机器人的数量为1个或多个。
9、本实用新型的有益效果是:
10、本实用新型成本低,采用两步法进行装箱,摆放机器人不需要向料箱内放入零件,因此可以极快的速度将零件位置整理到位,然后由码垛机器人一次同时抓取多件产品,实现了高速码垛。
技术特征:
1.一种高速码垛系统,其特征在于,包括下料皮带机,下料皮带机的进料处设有定位装置,下料皮带机的前端设有摆放机器人,下料皮带机的末端设有码垛皮带,码垛皮带的前端设有码垛机器人,码垛机器人的两侧设有料箱。
2.根据权利要求1所述一种高速码垛系统,其特征在于,定位装置为视觉定位相机。
3.根据权利要求1所述一种高速码垛系统,其特征在于,下料皮带机的皮带的一端与伺服电机连接,步进距离为l1。
4.根据权利要求1所述一种高速码垛系统,其特征在于,码垛皮带与伺服电机连接,码垛皮带的步进距离为l2。
5.根据权利要求1所述一种高速码垛系统,其特征在于,码垛皮带位于下料皮带机的上端或后端。
6.根据权利要求1所述一种高速码垛系统,其特征在于,摆放机器人和码垛机器人的数量为1个或多个。
7.根据权利要求1所述一种高速码垛系统,其特征在于,码垛机器人的输出端设有若干个吸盘。
技术总结
本技术公开一种高速码垛系统,包括下料皮带机,下料皮带机的进料处设有定位装置,下料皮带机的前端设有摆放机器人,下料皮带机的末端设有码垛皮带,码垛皮带的前端设有码垛机器人,码垛机器人的两侧设有料箱,本技术使用单条物流线路达到高速码垛的效果。
技术研发人员:刘志勇,邓尉,张强
受保护的技术使用者:上海广矩自动化设备有限公司
技术研发日:20230904
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!