一种皮带机紧急控制系统及方法与流程
本申请涉及皮带机控制,特别地,涉及一种皮带机紧急控制系统及方法。
背景技术:
1、在皮带机作业过程中,若出现皮带划伤、料斗下料不畅、运送料量突然增多和皮带打滑等紧急情况时,需要迅速关闭皮带机,使得皮带机停止运行,以保护人身和设备安全。
2、目前,主要通过拉绳带动弹簧运动,弹簧压住开关按钮,以紧急关闭皮带机,但是,弹簧和开关按钮为机械机构,使用较长时间后,容易出现损坏,导致紧急关闭皮带机的工作无法完成。
技术实现思路
1、本申请的实施例提供了一种皮带机紧急控制系统及方法,通过电路结构对皮带机进行制动,不容易出现损坏。
2、本申请的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本申请的实践而习得。
3、根据本申请实施例的第一方面,提供了一种皮带机紧急控制系统,包括:
4、拉绳,设有用于检测拉绳拉力的拉力检测机构;
5、制动电路,用于制动皮带机;
6、控制器,根据拉力检测机构的拉力检测结果,控制制动电路,对皮带机进行制动。
7、在本申请的一些实施例中,基于前述方案,所述制动电路包括:
8、第一制动电路,响应于控制器发送的第一信号,对皮带机进行制动;
9、第二制动电路,响应于控制器发送的第二信号,对皮带机进行制动,所述第二信号对应的拉力检测结果大于所述第一信号对应的拉力检测结果。
10、在本申请的一些实施例中,基于前述方案,所述第一制动电路包括:
11、第一继电器,响应于所述第一信号,对所述第一继电器进行闭合;
12、第二继电器,响应于所述第一继电器的闭合信号,对所述第二继电器进行闭合;
13、第三继电器,响应于所述第二继电器的闭合信号,连通皮带机的跳闸回路。
14、在本申请的一些实施例中,基于前述方案,所述第一继电器的线圈连接控制器,所述第一继电器的动触点连接所述第二继电器的线圈,所述第二继电器的动触点连接所述第三继电器的线圈。
15、在本申请的一些实施例中,基于前述方案,所述第二制动电路包括:
16、第四继电器,响应于所述第二信号,对所述第四继电器进行闭合;
17、第五继电器,响应于所述第四继电器的闭合信号,对所述第五继电器进行闭合,响应于所述第五继电器的闭合信号,第三继电器连通皮带机的跳闸回路。
18、在本申请的一些实施例中,基于前述方案,所述第四继电器的线圈连接控制器,所述第四继电器的动触点连接所述第五继电器的线圈,所述第五继电器的动触点连接所述第三继电器的线圈。
19、在本申请的一些实施例中,基于前述方案,还包括:
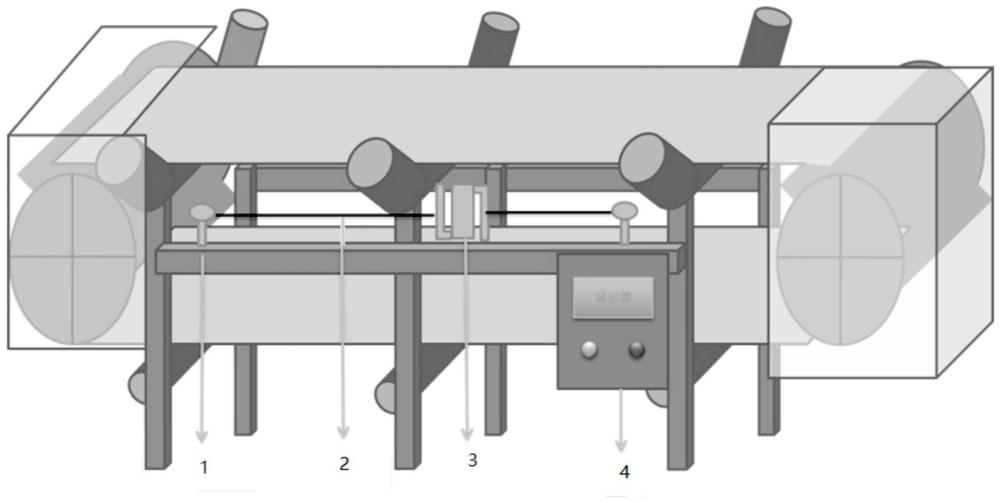
20、支架,用于安装拉绳,设在皮带机行进方向的两侧。
21、在本申请的一些实施例中,基于前述方案,所述支架包括:
22、两个固定杆,每个固定杆上设有固定头,拉绳两端分别连接一个固定头。
23、在本申请的一些实施例中,基于前述方案,还包括:
24、复位电路,对第一制动电路和第二制动电路进行复位。
25、根据本申请的第二方面,提供了一种皮带机紧急控制方法,包括:
26、拉动拉绳,拉力检测机构检测拉绳拉力,将拉力检测结果发送给控制器;
27、控制器根据拉力检测结果,控制制动电路,对皮带机进行制动。
28、在本申请的一些实施例中,基于前述方案,所述控制器根据拉力检测结果,控制制动电路,对皮带机进行制动,包括:
29、响应于控制器发送的第一信号,第一制动电路对皮带机进行制动;
30、响应于控制器发送的第二信号,第二制动电路对皮带机进行制动。
31、在本申请的一些实施例中,基于前述方案,所述响应于控制器发送的第一信号,第一制动电路对皮带机进行制动,包括:
32、响应于控制器发送的第一信号,闭合第一继电器;
33、响应于第一继电器的闭合信号,闭合第二继电器;
34、响应于第二继电器的闭合信号,闭合第三继电器;
35、响应于第三继电器的闭合信号,闭合皮带机的跳闸回路,对皮带机进行制动。
36、在本申请的一些实施例中,基于前述方案,所述响应于控制器发送的第二信号,第二制动电路对皮带机进行制动,包括:
37、响应于控制器发送的第二信号,闭合第四继电器;
38、响应于第四继电器的闭合信号,闭合第五继电器;
39、响应于第五继电器的闭合信号,闭合第三继电器;
40、响应于第三继电器的闭合信号,闭合皮带机的跳闸回路,对皮带机进行制动。
41、本申请的有益效果如下:
42、根据拉绳的拉力,控制器通过制动电路对皮带机进行制动,由于制动电路为电路结构,在使用较长时间后,也不容易损坏,使得紧急制动皮带机的工作能够顺利完成。
43、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种皮带机紧急控制系统,其特征在于,包括:
2.根据权利要求1所述的一种皮带机紧急控制系统,其特征在于,所述制动电路包括:
3.根据权利要求2所述的一种皮带机紧急控制系统,其特征在于,所述第一制动电路包括:
4.根据权利要求3所述的一种皮带机紧急控制系统,其特征在于,所述第一继电器的线圈连接控制器,所述第一继电器的动触点连接所述第二继电器的线圈,所述第二继电器的动触点连接所述第三继电器的线圈。
5.根据权利要求3所述的一种皮带机紧急控制系统,其特征在于,所述第二制动电路包括:
6.根据权利要求5所述的一种皮带机紧急控制系统,其特征在于,所述第四继电器的线圈连接控制器,所述第四继电器的动触点连接所述第五继电器的线圈,所述第五继电器的动触点连接所述第三继电器的线圈。
7.根据权利要求1所述的一种皮带机紧急控制系统,其特征在于,还包括:
8.根据权利要求1所述的一种皮带机紧急控制系统,其特征在于,还包括:
9.一种皮带机紧急控制方法,其特征在于,包括:
10.根据权利要求9所述的一种皮带机紧急控制方法,其特征在于,所述控制器根据拉力检测结果,控制制动电路,对皮带机进行制动,包括:
技术总结
本申请公开了一种皮带机紧急控制系统及方法,所述系统包括:拉绳,设有用于检测拉绳拉力的拉力检测机构;制动电路,用于制动皮带机;控制器,根据拉力检测机构的拉力检测结果,控制制动电路,对皮带机进行制动。本申请通过电路结构对皮带机进行制动,不容易出现损坏。
技术研发人员:陈雨,杜梦龙,张欣垒,王立峰,李福轩,曹堂山,宋海杰,张晓东
受保护的技术使用者:首钢京唐钢铁联合有限责任公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!