一种自爬式多功能吊装系统及空心墩双柱同步施工方法与流程
本发明涉及建筑施工领域,特别是指一种自爬式多功能吊装系统及空心墩双柱同步施工方法。
背景技术:
1、在高层建筑施工过程中,建筑材料的周转、倒运往往成为工程进度快慢的关键为了方便各种建筑材料的运输,通常会在施工现场搭设吊装系统。常规的吊装系统安全硬防护为散支散拼,现场安拆,频繁使用塔吊配合人工搭拆,搭拆频繁。高空作业风险大,且搭拆时下方作业完全停滞,搭拆周期长,费用高。安全硬防护阶段性搭设,无法随结构攀升实时就近防护,超高层高空坠物风险大。
技术实现思路
1、本发明提出一种自爬式多功能吊装系统及空心墩双柱同步施工方法,能够依靠已安装的钢管格构柱,安装一层、爬升一层。
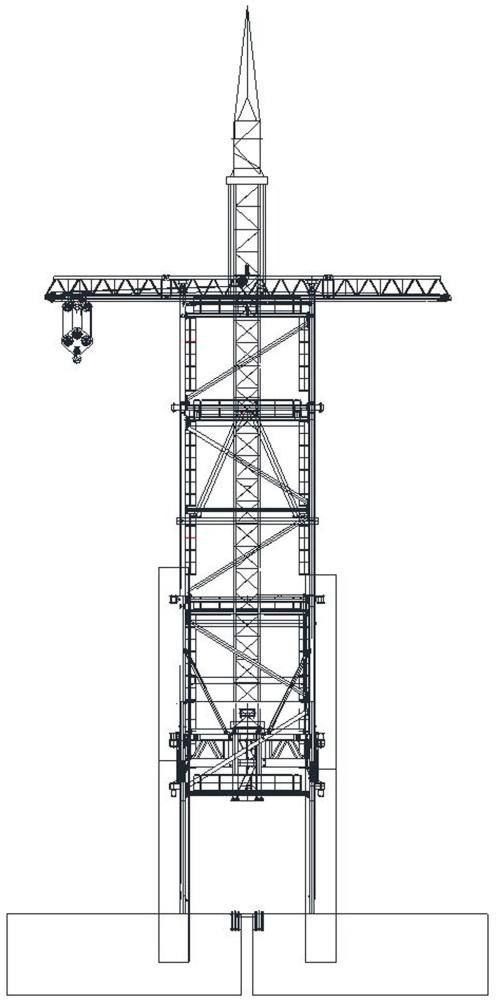
2、本发明的技术方案是这样实现的:一种自爬式多功能吊装系统,吊装系统包括架体组件、支撑组件、塔吊组件、提升组件、起重组件和智能控制器,所述智能控制器连接控制塔吊组件、提升组件和起重组件,所述架体组件和支撑组件设置在已安装的墩柱和钢管格构柱上,所述墩柱和钢管格构柱安装在承台上;
3、所述墩柱包括塔机基座和标准节,塔机基座和标准节上均包含相互连接的钢管格构柱;
4、所述架体组件由下至上依次安装的多个移动架,及移动架顶端的支撑臂,每个移动架包括立柱钢管、水平撑和斜撑;
5、所述支撑组件包括安装在移动架上用于搭接到墩柱和钢管格构柱的旋转支撑腿。
6、作为优选,所述架体组件包括第一移动架、第二移动架和第三移动架,以及移动架顶端的支撑臂,每个移动架包括立柱钢管、水平撑和斜撑;所述起重组件包括起重臂及其上的卷扬机、行走小车、起重钢丝绳及吊钩。
7、多功能吊装系统安装步骤包括:
8、第一步:安装塔机基座、独立高度的标准节;
9、第二步:安装塔机基座与第一移动架的连接梁;
10、第三步:安装第一移动架的立柱钢管,并与连接梁连接;
11、第四步:安装第一移动架的立柱钢管间水平撑和斜撑;
12、第五步:安装第一移动架的旋转支撑腿;
13、第六步:安装起重卷扬机底座斜撑杆和卷扬机;
14、第七步:安装第一移动架中的平台栏杆与爬梯;
15、第八步:按照第一移动架的方法,安装第二移动架的立柱钢管与水平撑;
16、第九步:安装第二移动架的立柱钢管间竖向斜撑及旋转支撑腿;
17、第十步:安装第三移动架的立柱钢管间水平撑、斜撑及操作平台;
18、第十一步:在第三移动架顶部安装支撑臂;
19、第十二步:在支撑臂上安装起重臂,在起重臂上安装行走小车、起重钢丝绳及吊钩。
20、作为优选,所述移动架为三个,包括由下至上依次设置的第一移动架、第二移动架和第三移动架,第一移动架下端固定连接在承台上,第三移动架上端安装起重组件。
21、作为优选,所述承台中心位置固定设置墩柱,墩柱两侧设有辅助安装移动架的支撑组件,支撑组件包括竖直的底柱和连接底柱的横杆;所述墩柱包括底部的塔机基座及其上方连接的固定连接的标准节,塔机基座和标准节的四角位置均为起主要支撑作用的钢管格构柱,塔机基座和标准节的钢管格构柱之间固定连接。
22、作为优选,所述塔机基座的钢管格构柱通过基座预埋件固定在承台上,所述移动架的立柱钢管下端通过塔机爬架预埋件承台上,立柱钢管之间通过水平撑和斜撑连接和固定;所述承台为对称且有一定间距设置的两个,塔机基座的四个基座预埋件分别设置在两个承台上,每个承台上设有一个独立的支撑组件,每个支撑组件包括四个呈正方形分布的底柱及其上连接的横杆。
23、作为优选,所述第一移动架的内侧与塔机基座的钢管格构柱之间通过水平的连接梁连接,第一移动架的外侧通过旋转支撑腿支撑在底柱上;所述第二移动架和第三移动架的内侧通过旋转支撑腿支撑在标准节的钢管格构柱上。
24、作为优选,所述架体组件中的支撑臂为三角桁架支撑臂,起重臂为三角桁架起重臂,每个移动架上还设有平台栏杆与爬梯。
25、一种空心墩双柱同步施工方法,施工方法采用自爬式多功能吊装系统工作,所述多功能吊装系统安装钢管格构柱的施工步骤包括:
26、第一步:根据设计图纸文件进行单片钢管组装;
27、第二步:利用提升系统提升单片钢管;
28、第三步:单片钢管定位、焊接;
29、第四步:与上述三步相同的步骤吊装和安装另一侧钢管;
30、第五步:将两片钢管根据图纸文件拼装成钢管格构;
31、第六步:利用导向板、千斤顶和全站仪进行精装定位,待钢管格构柱调试完成后,并将上下两层钢管格构柱焊接。
32、作为优选,所述提升系统由千斤顶、钢绞线、下顶点、提升承重梁组成,千斤顶为连续式液压千斤顶,安装在塔机基座两侧,单片钢管由连续式液压千斤顶支撑提升承重梁进行提升。
33、与现有技术相比,本发明的优点在于:将钢管在地面组装成榀,由2台8t同步卷扬机导四线进行双吊点同时起吊提升,通过变幅机构进行移动成榀的钢管并安装。智能爬升同样依靠已安装的钢管格构柱,安装一层、爬升一层。四台数控同步连续液压千斤顶→爬升动力,每台油顶穿九根共36根钢绞线→爬升牵引,通过反复张拉钢绞线达到爬升效果。
技术特征:
1.一种自爬式多功能吊装系统,其特征在于:吊装系统包括架体组件、支撑组件、塔吊组件、提升组件、起重组件和智能控制器,所述智能控制器连接控制塔吊组件、提升组件和起重组件,所述架体组件和支撑组件设置在已安装的墩柱和钢管格构柱上,所述墩柱和钢管格构柱安装在承台上;
2.根据权利要求1所述的一种自爬式多功能吊装系统,其特征在于:所述架体组件包括第一移动架、第二移动架和第三移动架,以及移动架顶端的支撑臂,每个移动架包括立柱钢管、水平撑和斜撑;所述起重组件包括起重臂及其上的卷扬机、行走小车、起重钢丝绳及吊钩。
3.根据权利要求2所述的一种自爬式多功能吊装系统,其特征在于:多功能吊装系统安装步骤包括:
4.根据权利要求3所述的一种自爬式多功能吊装系统,其特征在于:所述移动架为三个,包括由下至上依次设置的第一移动架、第二移动架和第三移动架,第一移动架下端固定连接在承台上,第三移动架上端安装起重组件。
5.根据权利要求4所述的一种自爬式多功能吊装系统,其特征在于:所述承台中心位置固定设置墩柱,墩柱两侧设有辅助安装移动架的支撑组件,支撑组件包括竖直的底柱和连接底柱的横杆;所述墩柱包括底部的塔机基座及其上方连接的固定连接的标准节,塔机基座和标准节的四角位置均为起主要支撑作用的钢管格构柱,塔机基座和标准节的钢管格构柱之间固定连接。
6.根据权利要求5所述的一种自爬式多功能吊装系统,其特征在于:所述塔机基座的钢管格构柱通过基座预埋件固定在承台上,所述移动架的立柱钢管下端通过塔机爬架预埋件承台上,立柱钢管之间通过水平撑和斜撑连接和固定;所述承台为对称且有一定间距设置的两个,塔机基座的四个基座预埋件分别设置在两个承台上,每个承台上设有一个独立的支撑组件,每个支撑组件包括四个呈正方形分布的底柱及其上连接的横杆。
7.根据权利要求6所述的一种自爬式多功能吊装系统,其特征在于:所述第一移动架的内侧与塔机基座的钢管格构柱之间通过水平的连接梁连接,第一移动架的外侧通过旋转支撑腿支撑在底柱上;所述第二移动架和第三移动架的内侧通过旋转支撑腿支撑在标准节的钢管格构柱上。
8.根据权利要求7所述的一种自爬式多功能吊装系统,其特征在于:所述架体组件中的支撑臂为三角桁架支撑臂,起重臂为三角桁架起重臂,每个移动架上还设有平台栏杆与爬梯。
9.一种空心墩双柱同步施工方法,其特征在于:施工方法采用自爬式多功能吊装系统工作,所述多功能吊装系统安装钢管格构柱的施工步骤包括:
10.根据权利要求9所述的一种空心墩双柱同步施工方法,其特征在于:所述提升系统由千斤顶、钢绞线、下顶点、提升承重梁组成,千斤顶为连续式液压千斤顶,安装在塔机基座两侧,单片钢管由连续式液压千斤顶支撑提升承重梁进行提升。
技术总结
本发明提出了一种自爬式多功能吊装系统及空心墩双柱同步施工方法,吊装系统包括架体组件、支撑组件、塔吊组件、提升组件、起重组件和智能控制器,所述智能控制器连接控制塔吊组件、提升组件和起重组件,所述吊装系统设置在已安装的墩柱和钢管格构柱上。本发明将钢管在地面组装成榀,由同步卷扬机导四线进行双吊点同时起吊提升,通过变幅机构进行移动成榀的钢管并安装。智能爬升同样依靠已安装的钢管格构柱,安装一层、爬升一层。四台数控同步连续液压千斤顶为爬升动力,钢绞线爬升牵引,通过反复张拉钢绞线达到爬升效果。
技术研发人员:王俊杰,刘力源,王宏伟,牛光坤,付永天,周靖鸿,唐俊杰,王敏
受保护的技术使用者:四川川交路桥有限责任公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!