一种无人驾驶车的垃圾自动倾倒控制方法及系统与流程
本发明涉及清扫车领域,尤其涉及一种无人驾驶车的垃圾自动倾倒控制方法及系统。
背景技术:
1、现有技术中,环卫清扫车的垃圾倾倒过程一般是通过人工操作完成,在垃圾箱内垃圾装满后,环卫工人将垃圾箱从环卫车内拉出,完成垃圾倾倒后,进行垃圾箱的高压冲水清洗操作,完成清洗操作后,将垃圾箱重新装入至环卫清洁车内。显然通过上述方式进行垃圾的倾倒,环卫工人的工作量大,操作效率较低。
2、为了解决上述问题,现有技术中设计了自动倾倒垃圾的装置及控制系统,一般是将环卫清扫车开到指定倾倒位置,通过人工在控制板面上操作,控制环卫清扫车内的垃圾斗(或其它垃圾容纳装置)旋转举升,从而实现垃圾的倾倒。显然其需要通过人工在操作面板上操作,或是在环卫清扫车内设置多个按钮进行相应操作的控制;虽然该种方式可提高操作效率,但是自动化程度较低,便利性不高。
3、此外,清洁设备大多为外设的清洁设备,无法在垃圾倾倒完成后,及时进行垃圾斗的清洗,智能化程度低,影响环卫清扫车整体倾倒垃圾、清洗的整体效率,作用效果较差。
4、因此,现有技术还有待提高。
技术实现思路
1、鉴于上述现有技术的不足,本发明的目的在于提供一种无人驾驶车的垃圾自动倾倒控制方法及系统,旨在解决垃圾箱自动倾倒垃圾时自动化程度低,同时解决现有环卫清扫车需外设清扫设备,导致成本较高的问题。
2、本发明的技术方案如下:一种无人驾驶车的垃圾自动倾倒控制方法,所述方法包括:
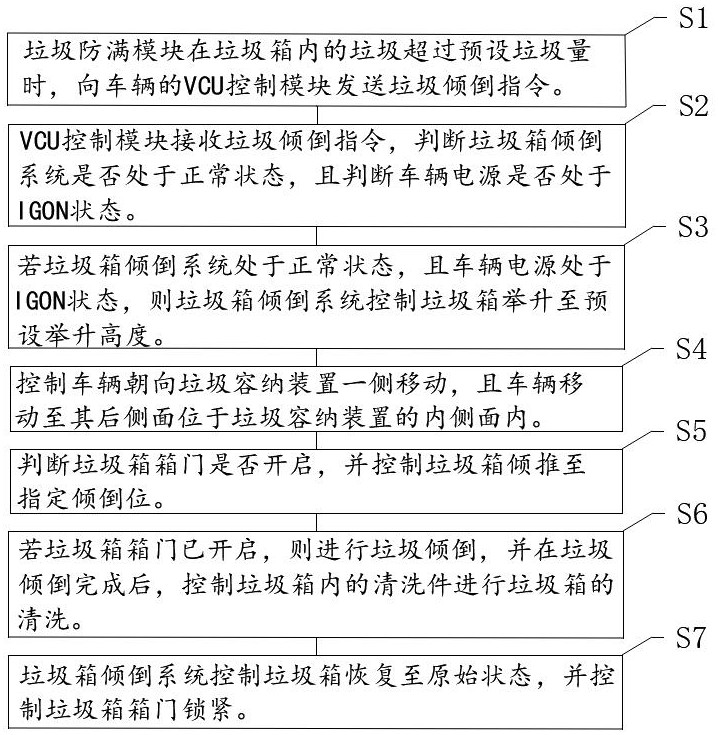
3、vcu控制模块接收垃圾倾倒指令,判断垃圾箱倾倒系统是否处于正常状态,且判断车辆电源是否处于igon状态。
4、若垃圾箱倾倒系统处于正常状态,且车辆电源处于igon状态,则垃圾箱倾倒系统控制垃圾箱举升至预设举升高度。
5、控制车辆朝向垃圾容纳装置一侧移动,且车辆移动至其后侧面位于垃圾容纳装置的内侧面内。以保证垃圾箱在倾倒垃圾时处于垃圾容纳装置内侧,防止垃圾未倾倒至垃圾容纳装置内的问题。
6、判断垃圾箱箱门是否开启,并控制垃圾箱倾推至指定倾倒位。
7、若垃圾箱箱门已开启,则进行垃圾倾倒,并在垃圾倾倒完成后,控制垃圾箱内的清洗件进行垃圾箱的清洗。
8、显然,本发明中的一种无人驾驶车的垃圾自动倾倒控制方法,在接收到垃圾倾倒指令后,会先对车辆内的垃圾箱倾倒系统和车辆电源所处状态进行判断,若符合垃圾倾倒条件,则开启垃圾倾倒、清洗功能,完成垃圾箱内垃圾的快速自动化倾倒,并在垃圾倾倒后完成垃圾箱的快速清洗,可有效提高作用效率。
9、在一实施例中,所述垃圾倾倒指令由垃圾防满模块或自动驾驶模块或遥控模块或云端平台发送给vcu控制模块。一般垃圾防满模块是在垃圾箱内的垃圾超过预设垃圾量(高度)时,向车辆的vcu控制模块发送垃圾倾倒指令,而自动驾驶模块、遥控模块、云端平台可根据需求进行该指令的发送。此外,需要说明的是,云端平台为用于管理无人驾驶车的平台,与无人驾驶车处于通讯连接状态。
10、在一实施例中,若垃圾箱倾倒系统处于非正常状态和/或车辆电源处于非igon状态,则向vcu控制模块反馈故障原因,并进入倾倒系统故障模式。因此,该状态下,垃圾箱内的垃圾倾倒及垃圾箱的清洗功能无法开启。
11、在另一实施例中,控制车辆朝向垃圾容纳装置一侧移动后,车辆的后侧面移动至距离垃圾容纳装置内侧面145mm~155mm。在本实施例中,为150mm。
12、在另一实施例中,在垃圾箱清洗完成后,还包括以下步骤:
13、垃圾箱倾倒系统控制垃圾箱恢复至原始状态,并控制垃圾箱箱门锁紧。此时,已完成垃圾箱内垃圾的自动倾倒和垃圾箱的自动清洗。
14、在一实施例中,所述垃圾箱倾倒系统通过控制举升件将垃圾箱举升至预设举升高度,且通过控制翻转件将垃圾箱倾推至指定倾倒位。作用过程中,垃圾箱倾倒系统在接收到vcu控制模块发送的控制指令后,会控制举升件、翻转件动作,以将垃圾箱调整至指定位置,进行相应作业操作。
15、在一实施例中,所述举升件包括:第一直线驱动装置、与所述第一直线驱动装置输出端连接的传动部、与所述传动部连接的滑动件。
16、在一实施例中,所述翻转件包括:至少一组翻转驱动件、与所述翻转驱动件输出端连接的翻转部,所述翻转部的一端可旋转地连接于车辆上,且与垃圾箱固定连接;所述翻转部与所述滑动件相配合。
17、在另一实施例中,所述清洗件包括:所述清洗件包括:电磁阀、若干个安装于所述垃圾箱顶部的第一清洗喷头、第二清洗喷头;所述第二清洗喷头与垃圾箱顶部的内壁之间的夹角为15°~30°。第一清洗喷头、第二清洗喷头均设置有2个。
18、本发明还提供一种无人驾驶车的垃圾自动倾倒控制系统,包括:vcu控制模块、垃圾箱倾倒系统、垃圾防满模块、自动驾驶模块、遥控模块、云端平台;所述vcu控制模块用于在接收到所述垃圾防满模块或自动驾驶模块或遥控模块或云端平台发送的垃圾倾倒指令后,控制垃圾箱倾倒系统进行垃圾倾倒操作;所述自动驾驶模块或遥控模块还用于向所述vcu控制模块发送车辆运行指令,以控制车辆进行清扫作业。
19、综上所述:本文提出的一种无人驾驶车的垃圾自动倾倒控制方法及系统,具有以下有益效果:
20、1、可实现垃圾箱内垃圾的快速自动化倾倒,和快速自动清洗,无需人工参与,自动化程度高,有效提高垃圾倾倒的准确性和效率;
21、2、无需外设其它垃圾箱清洗装置及系统,便可进行垃圾箱的快速清洗,提高垃圾箱清洗的便利性和清洗效率,降低垃圾箱清洗所需投入的成本;
22、3、可有效缩短力臂,减少举升所需的动力,无需设置驱动力大的驱动装置,有效降低生产成本。
技术特征:
1.一种无人驾驶车的垃圾自动倾倒控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的一种无人驾驶车的垃圾自动倾倒控制方法,其特征在于,所述垃圾倾倒指令由垃圾防满模块或自动驾驶模块或遥控模块或云端平台发送给vcu控制模块。
3.根据权利要求1所述的一种无人驾驶车的垃圾自动倾倒控制方法,其特征在于,若垃圾箱倾倒系统处于非正常状态和/或车辆电源处于非igon状态,则向vcu控制模块反馈故障原因,并进入倾倒系统故障模式。
4.根据权利要求1所述的一种无人驾驶车的垃圾自动倾倒控制方法,其特征在于,控制车辆朝向垃圾容纳装置一侧移动后,车辆的后侧面移动至距离垃圾容纳装置内侧面145mm~155mm。
5.根据权利要求1所述的一种无人驾驶车的垃圾自动倾倒控制方法,其特征在于,在垃圾箱清洗完成后,还包括以下步骤:
6.根据权利要求1所述的一种无人驾驶车的垃圾自动倾倒控制方法,其特征在于,所述垃圾箱倾倒系统通过控制举升件将垃圾箱举升至预设举升高度,且通过控制翻转件将垃圾箱倾推至指定倾倒位。
7.根据权利要求6所述的一种无人驾驶车的垃圾自动倾倒控制方法,其特征在于,所述举升件包括:第一直线驱动装置、与所述第一直线驱动装置输出端连接的传动部、与所述传动部连接的滑动件。
8.根据权利要求7所述的一种无人驾驶车的垃圾自动倾倒控制方法,其特征在于,所述翻转件包括:至少一组翻转驱动件、与所述翻转驱动件输出端连接的翻转部,所述翻转部的一端可旋转地连接于车辆上,且与垃圾箱固定连接;所述翻转部与所述滑动件相配合。
9.根据权利要求1所述的一种无人驾驶车的垃圾自动倾倒控制方法,其特征在于,所述清洗件包括:电磁阀、若干个安装于所述垃圾箱顶部的第一清洗喷头、第二清洗喷头;所述第二清洗喷头与垃圾箱顶部的内壁之间的夹角为15°~30°。
10.一种无人驾驶车的垃圾自动倾倒控制系统,其特征在于,包括:vcu控制模块、垃圾箱倾倒系统、垃圾防满模块、自动驾驶模块、遥控模块、云端平台;
技术总结
本发明公开了一种无人驾驶车的垃圾自动倾倒控制方法及系统,所述方法包括:VCU控制模块接收垃圾倾倒指令,判断垃圾箱倾倒系统是否处于正常状态、车辆电源是否处于IGON状态;若垃圾箱倾倒系统处于正常状态,且车辆电源处于IGON状态,则控制垃圾箱举升至预设举升高度;控制车辆朝向垃圾容纳装置一侧移动,且车辆移动至其后侧面位于垃圾容纳装置的内侧面内;判断垃圾箱箱门是否开启,并控制垃圾箱倾推至指定倾倒位;若垃圾箱箱门已开启,则进行垃圾倾倒,并在垃圾倾倒完成后,进行垃圾箱的清洗。本发明可实现垃圾箱内垃圾的快速自动化倾倒,和其快速自动清洗,无需人工参与,自动化程度高,有效提高垃圾倾倒的准确性和效率。
技术研发人员:蔡宽,李泳德,王金龙,李大川,张元方
受保护的技术使用者:城市之光(深圳)无人驾驶有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!