塔式吊车定位防摆无模型自适应控制方法
本发明属于塔式吊车定位防摆控制,具体涉及一种基于无模型自适应控制的塔式吊车定位防摆无模型自适应控制方法。
背景技术:
1、塔式吊车(又称塔吊)在建筑行业中得到广泛使用,由于其自身结构特点和欠驱动特性,在实际工程中控制起来难度较大,存在工作效率低、抗摆动能力差、人员伤害事故风险高等缺点,因此对于塔式吊车系统的自动控制研究是必要的。
2、为解决塔式吊车定位防摆控制问题,国内外学者做了深入研究。现阶段针对塔式吊车定位防摆控制方法主要是基于系统模型而设计的,如发展较为成熟的滑模控制、自适应控制、自抗扰控制、鲁棒控制等控制方法。为了减小吊绳长度变化对控制器的影响,有些公开文献将神经网络与zvd整形器结合,实时更新zvd参数以适应系统动态的变化,增强了系统的鲁棒性。有些公开文献根据塔式吊车的数学模型,通过能量计算,设计了一种自适应控制器,并针对变绳长,不同负载重量做出了相应的改进,实现了塔式吊车的防摆定位,且具有较好的抗干扰能力。有些公开文献设计了一组复合滑模面,在放宽控制器对模型精确度要求的同时,有效地消除了执行器死区的影响。有些公开文献出了一种改进的自抗扰控制算法,在完成控制任务的同时,减少了系统在稳态时的高频振荡,避免"颤振"现象,同时提高了系统的动态性能。有些公开文献设计了一种超螺旋滑模控制算法,能够有效抑制扭矩颤振,在完成控制任务的同时具有较好的抗干扰能力。
3、上述方法中控制器的设计大都依赖于塔吊的数学模型,模型精确度对控制器效果有着很大的影响。然而塔吊建模复杂,模型参数不确定,非线性强,很难得出精确的建模结果。mfac(model-free adaptive control)是由侯忠生教授所提出的一种数据驱动控制方法,在系统的运行过程中,通过利用系统的输入输出数据,将具有非线性关系的原系统等价转化为在每个工作点输入输出呈线性关系的系统,再通过设计的准则函数,根据最优化理论来设计控制器,对非线性系统有较好的控制效果,且已经广泛应用于城市交通、无人机、医疗、电机等各个领域。
技术实现思路
1、为解决现有技术存在的技术问题,本发明提供了一种基于无模型自适应控制的塔式吊车防摆定位控制方法。首先利用塔式吊车的输入输出数据建立了系统等价的偏格式动态线性化数据模型;然后在虚拟偏格式动态线性化数据模型上,根据约束条件下的优化理论,布置无模型自适应控制律及伪梯度估计算法,利用系统输入输出数据的估计算法来估计伪梯度参数;加入微分追踪器,对输入信号进行处理,以解决执行器饱和带来的震颤问题,进一步提高系统的动态性能;最后,通过仿真对控制器的有效性进行了验证。
2、为实现上述目的,本发明所采用的技术方案为:塔式吊车定位防摆无模型自适应控制方法,具体步骤如下:
3、一、利用塔式吊车的输入输出数据,通过驱动建模方法,建立了系统等价的虚拟偏格式动态线性化数据模型;
4、二、在虚拟偏格式动态线性化数据模型上,根据约束条件下的优化理论,布置无模型自适应控制律及伪梯度估计算法,利用系统输入输出数据的估计算法来估计伪梯度参数;
5、三、加入微分追踪器,对输入信号进行处理,以解决执行器饱和带来的震颤问题,进一步提高系统的动态性能;
6、四、通过lipschitz条件和不等式理论分析证明闭环系统的稳定性及系统误差的收敛性。
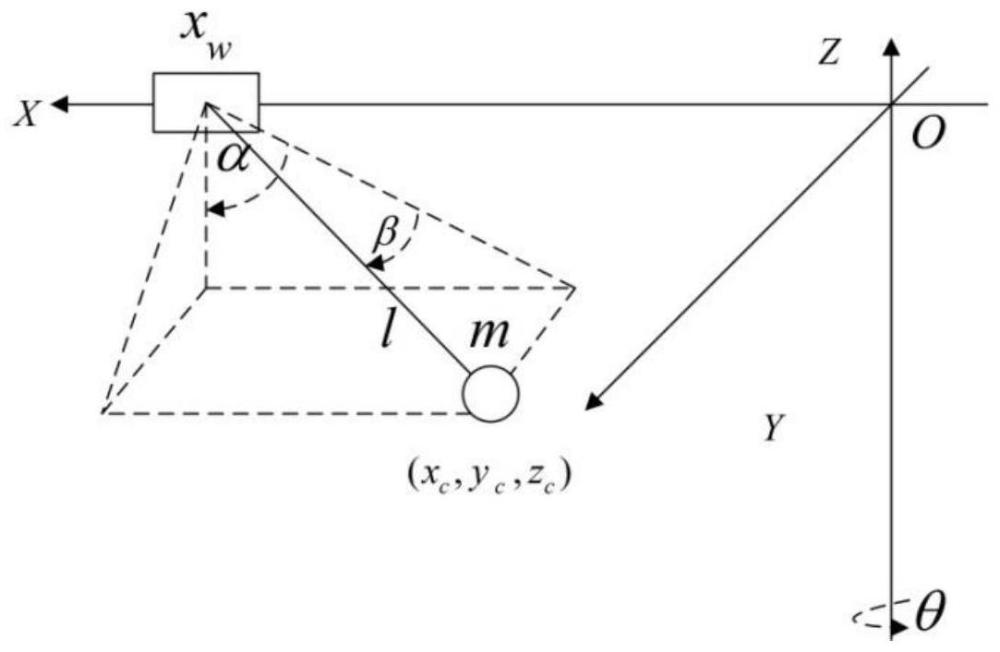
7、在步骤一中,构建塔式起重机系统运动平衡方程,由于实际塔式起重机的系统比较复杂,为了便于进行数学分析,对模型作如下简化:
8、(1)、将吊钩和负载看作质点;
9、(2)、把塔臂与负载之间的连接绳子看作刚性连接,忽略弹性形变和绳子质量;
10、(3)、不计风力和空气阻力;
11、负载在此坐标系下的坐标如下:
12、
13、图中,xw是带动负载的小车在沿起重臂(即在x轴上)的坐标;θ表示起重臂的角度位置;l是负载与小车之间吊绳的长度;m是负载质量;α是吊在xoz平面上投影与z轴的夹角,同时也是负载沿起重臂运动时产生的摆角;β是吊绳在xoz平面上投影与自身的夹角,同时也表示起重臂旋转时负载产生的摆角。
14、根据式(1)求出负载在各方向上的速度分量如下:
15、
16、负载的动能和势能分别如下:
17、
18、p=-mgl cosβcosα (4)
19、拉格朗日算子v为:
20、v=t-p (5)
21、拉格朗日方程如下:
22、
23、
24、根据式(6)和式(7)塔式起重机的动力学模型如下:
25、
26、
27、上式中的l是吊绳长度,g是重力加速度g=9.8m/s2,α,β,xw,θ为系统输出,分别是小车加速度以及塔臂的旋转加速度,同时也是系统的两个控制输入,是吊绳在xoz平面上投影与自身的夹角加速度,是吊在xoz平面上投影与z轴的夹角加速度。
28、对于一般的离散时间非线性系统可以描述如下:
29、y(k+1)=f(y(k),y(k-1),…,y(k-ny),u(k),u(k-1),…,u(k-nu)) (10)
30、其中,u(k)∈r表示k时刻系统的输入;y(k)∈r表示k时刻系统的输出;ny、nu是两个未知的正整数;是未知的非线性函数。
31、ul(k)=[u(k),…,u(k-l+1)]t (11)
32、且满足当k≤0时,有ul(k)=0l,其中,整数l为控制输入线性化长度常数;0l是维数为l的零向量。
33、假设1f(…)关于第(ny+2)个变量到第(ny+l+1)个变量分别存在连续偏导数。
34、假设2系统(10)满足广义lipschitz条件,任k1≠k2,0≤k1,k2,ul(k1)≠ul(k2)有:
35、|y(k1+1)-y(k2+1)|≤b||ul(k1)-ul(k2)|| (12)
36、在式(12)中,b>0是一个可选择常数,y(ki+1)=f(y(ki),…,y(ki-ny),u(ki),…u(ki-nu)),i=1,2。
37、记δul(k)=ul(k)-ul(k-1)。
38、定理1对于满足假设1和假设2的非线性系统(10),给定l,当||δul(k)||≠0时,一定存在一个称为伪梯度(pseudo gradient,pg)的时变参数向量φp,l(k)∈rl,使得系统(10)可转化为如下的pfdl数据模型:
39、
40、且对于任意时刻k,是有界的pg;δul(k)=[δu(k),…,δu(k-l+1)]t;l是控制输入线性化常数。
41、根据式(13),考虑如下估计准则函数:
42、
43、其中,μ>0是权重因子,根据极小化准则函,得到pg估计算法,如下:
44、
45、其中,η∈(0,2]是步长因子,其作用是使控制算法更具有一般性,为未知pgφp,l(k)的估计值,为了增强pg估计算法对时变参数的跟踪性能,对式(15)引入参数重置条件,如下:
46、如果满足或或|δu(k-1)|≤ε,
47、考虑到塔式起重机系统模型的复杂性,令式(11)中滑动窗口的长度l=3,使在通过塔式起重机的输入输出数据进行偏格式动态线性化时得到的每个工作点的线性关系更加贴近实际系统。将l=3代入式(13),得:
48、δy(k+1)=φ1(k)δu(k)+φ2(k)δu(k-1)+φ3(k)δu(k-2) (16)
49、在步骤二中,为消除系统偏差,由式(16)可知,在不同时刻k,时间窗口中不同时刻输入变化量会影响下一时刻输出变化量,根据最优化理论,考虑塔机的非自衡特性,约束条件下的准则函数为:
50、
51、其中,λ>0是权重系数,y*(k+1)是设定目标在k+1时刻的值。
52、将式(16)代入式(17)中,对u(k)求偏导,并令其等于0,得到如下式:
53、
54、
55、由式(18)可知,控制器涉及的参数较多。针对塔式起重机系统,在保证大部分控制性能的前提下,将控制器进行简化,得到如下式:
56、
57、其中,ρ1,ρ2,ρ3均为步长因子。
58、在步骤三中,为了解决执行器饱和造成的震荡,加入微分追踪器,对输入信号进行处理,如下式:
59、
60、其中,h0为滤波因子;h为步长因子;r为快速因子,r越大,跟踪越快,fhan为最速控制函数,如下式:
61、
62、其中h为步长因子;r为快速因子,r越大,跟踪越快;x1为信号的跟踪输出;x2为信号微分的输出;sign()为符号函数;d,d0,a0,y,a1,a2,a,为参数变量,没有实际意义,仅用来方便表示和计算;fsg()表示如下:
63、fsg(x,d)=(sign(x+d)-sign(x-d))/2 (22)
64、在步骤三中,对于满足假设1和假设2的式(16),若采用式(15)和式(19)的无模型自适应控制律,则当系统期望输出是常值,即yd(k+1)=yd(k)=const,时,存在一个λ>λmin>0使得系统期望输出和实际输出的误差逐渐趋于零,即系统输出y(k)和输入u(k)是有界的,具体证明过程如下:
65、假设3:对某一给定的有界期望输出信号y*(k+1),总存在一个有界的u*(k),使得系统在此控制信号的驱动下,其输出等于y*(k+1)。
66、假设4:对任何时刻k以及δu(k)≠0,系统pg的符号保持不变,即满足φp,l(k)>ε>0,或φp,l(k)<-ε,其中,ε是一个小正数。
67、引理1令:
68、
69、若则s(a)<1,其中s(·)为谱半径。
70、第一步:证明时变参数估计值是有界的。
71、由于在设计控制器时并没有对时变参数pg的算法做出调整,因此,由参考文献[16]可知,是有界的,且上界为
72、第二步:证明系统跟踪误差收敛且系统bibo稳定。
73、由于有界,其上界为因此存在λmin>0和有界常数n1,n2,n3,n4,n5,使得当λ>λmin时,满足:
74、
75、
76、
77、则n2+n3<1/3,定义误差为:
78、e(k)=y*-y(k) (26)
79、令:
80、
81、δul(k)=[δu(k),…,δu(k-l+1)]t
82、c=[1,0,…0]t∈rl
83、则δul(k)可以表示为:
84、
85、知a(k)的特征值为0,由引理1可知,s(a(k))=0,在此基础上,总存在一个任意小的正数ε1,满足:
86、1>s(a(k))+ε1≥||a(k)||v (28)
87、令d1=s(a(k))+ε1=ε1,由ul(k),k≤0的定义有||δul(0)||v=0,对式(27)两边取范数,则:
88、
89、由于ρ1,ρ2,ρ3是可调参数,可假设存在一个值b,使得b≥ρ1≥ρ2≥ρ3,再由式(29)得:
90、||δul(k)||v<d1·||δul(k-1)||v+3bn1·|e(k)|+3b·n1·|e(k-1)|+b·n1·|e(k-2)| (30)
91、从实际系统考虑,在相邻的3个时刻内的误差值必定存在一个较大值,假设|e(k)|≥|e(k-1)|≥|e(k-2)|,则式(30)可以转化为如下:
92、
93、将式(16)和式(19)代入式(26)中,得到如下式:
94、
95、对式(32)取范数,得如下式:
96、
97、根据式(23),总可以选择ρ1,ρ2,ρ3,使得:
98、
99、令d2=1-(ρ1+ρ2+ρ3)n2。
100、同理,可得:
101、
102、令d3=(ρ2+2ρ3)n5。
103、
104、令d4=ρ3n5。
105、将式(34),(35),(36)代入式(33)中,得:
106、|e(k+1)|<d2|e(k)|+d3|e(k-1)|+d4|e(k-2)|+d1|φp,l(k)||v·||δu(k-1)||v (37)
107、假设d2|e(k)|,d3|e(k-1)|,d4|e(k-2)|中,d2|e(k)|为较大值,则
108、e(k+1)<3d2|e(k)|+d1·|φp,l(k)||v·||δul(k-1)||v (38)
109、令d5=3d2<1,则d5<1,则:
110、
111、令d6=7bn3,则:
112、
113、令:
114、
115、由式(40),(41)可知|e(k+1)|<g(k+1),如果g(k+1)收敛,知e(k+1)也收敛。
116、
117、
118、由n2+n3<1/3,b<1,知:
119、d5>3-9bn2>9b(n2+n3)-9bn2=9bn3>7bn3=d6 (44)
120、则:
121、
122、故:
123、g(k+2)<d5g(k+1)+h(k)<(d5+d1)g(k+1) (46)
124、由于ε为一个任意小的正数,则如下不等式成立:
125、d1+d5=ε+{3-3(ρ1+ρ2+ρ3)n2)}<1 (47)
126、
127、由式(48)可知g(k+1)收敛,故由上文可知e(k+1)收敛。
128、由式(31),(46),(48)可知:
129、
130、塔式吊车是非线性、多变量、强耦合系统,很难得到系统精确的数学模型。本发明基于塔吊系统的复杂度,采用偏格式动态线性化方法,建立了塔机各系统的动态线性化数据模型;针对塔机的非自衡特性,利用约束条件下的优化理论及无模型自适应控制理论进行控制器的设计并通过lipschitz条件和不等式理论分析证明了闭环系统的稳定性和系统误差的有界性;加入微分追踪器,对输入信号进行处理,解决执行器饱和带来的震颤问题;最后通过仿真验证了控制算法的有效性。
131、本发明与现有技术相比,具体有益效果体现在:
132、一、本发明提出塔式吊车各系统的数据驱动建模方法,得到了各系统的动态线性化数据模型。这种建模方法只需系统的输入输出数据,不需要系统的先验知识,能够克服工程实际应用中塔式吊车精确数学模型难以建立以及现有非线性数学模型存在未建模动态问题,提高系统的非线性建模精度,并为其它复杂非线性欠驱动系统的建模提供了一个新的思路。
133、二、本发明在虚拟动态线性化数据模型基础上,设计了基于数据驱动的塔式吊车无模型自适应定位防摆控制方法。这种方法不需要系统非线性动力学模型,仅根据采集到的系统输入输出信息设计控制器,解决已有控制方法对吊车数学模型以及模型参数的依赖问题,设计方法简单,易于在工程实际中得到应用。
134、三、本发明在控制器设计中加入了微分追踪器,对输入信号进行了处理,解决了已有控制方法造成的执行器饱和问题,消除了运行初期执行器的震荡,延长了执行器寿命。
135、四、本发明通过严格的理论分析证明了闭环系统的稳定性以及系统误差的收敛性。
- 还没有人留言评论。精彩留言会获得点赞!