一种起重机用道路坡度识别装置及方法与流程
本发明涉及一种起重机用道路坡度识别装置及方法,属于工程机械中的起重机。
背景技术:
1、随着技术的发展,工程起重机的大型化已发展到登峰造极的水平。公路行驶的轮式起重机最大起重量做到了2600吨,在工地内转场时的行驶状态下车长已接近20米,车重超过200吨。如此巨大的车辆在道路上行驶移动,不仅仅需要车辆自身有强大的动力来驱动车辆,还需要有良好的路面来支撑车辆。
2、但是,在超大型起重机的实际应用中,为了节省成本、缩短工期,现场道路往往只是简易公路,各种坡道的引坡无法达到标准铺装公路的要求长度。大型车辆行驶时经常会出现车头已经在坡上,车尾还在平路段,这大大提高了司机操作车辆的难度。当发动机全功率输出时,可能出现“窜车”现象,如果仅仅是中等功率输出,当车辆全部上到坡道上时,就可能出现因为驱动力需求激增导致发动机熄火的现象。
3、目前常用的车身姿态监控方案有两种:在车辆上布置单个水平仪、通过发动机的输出功率变化来反推车辆行驶的道路变化情况。
4、如图1所示,在国内外商用车上,通常的做法是在车身上布置一个水平仪(这个水平仪通常内嵌在某个控制器上,如发动机控制器、变速箱控制器、车身控制器等),并在标准路面上对水平仪进行标零校准。校准完成后,水平仪传递的自身倾角信号就是车辆的坡度信号。
5、中国专利文献号cn104791475a,公开(公告)日2015.07.22,公开了一种对实际车速进行微分获得整车实际加速度,基于车辆当前动力传递过程计算出当前车辆应有的加速度,两者的差值视为当前的坡度。
6、中国文献专利号cn105673830b,公开(公告)日2017.09.15,公开了一种利用轮胎转速、刹车踏板状态、离合器工作状态来判断车辆行驶状态,通过车辆行驶方程来判断道路坡度值,并以此来调整变速箱换挡策略的控制方法;
7、不论是利用水平仪监控车身姿态,还是用车辆加速度差值来推算车辆姿态,亦或是用车辆行驶方程判断道路坡度值,都有以下特征:
8、1.数据来源单一。为了节约成本,上述方案中均采用单一信号作为来源来推算车辆当前行驶路面的爬坡度,并通过标定、优化算法等手段来提高信号精确度。然而因为数据来源唯一,一旦数据来源出现错误,计算出来的坡度值必然一起出现错误。
9、2.数据缺乏预测性。与商用车、乘用车相比,起重机尤其是大型起重机自身长度长、重量大,在爬坡时经常会出现车头已经在坡上、车尾还在平地上的现象;此时单个水平仪传感器给出的坡度数值a仅仅是部分坡度值而不是完整的真实的坡度值,而通过输出功率和阻力功率计算出来的车辆坡度更是如此,两种方法计算出来的坡度值与车辆将要进入的坡道坡度b存在明显差异,如果以此数字为依据来调整发动机输出,将会出现明显的动力不足;而且这个问题只有整车全部行驶到坡道上之后才会解决。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种起重机用道路坡度识别装置及方法,通过设置在大型起重机车头、车尾两处的角度传感器来检测车身的物理角度,再将车辆行驶过程中车架自身挠度影响、发动机输出功率变化来反推的行驶阻力变化等因素考虑进去后,极大程度提高了车辆面临的道路坡度变化的测算预估准确程度。
2、为达到上述目的,本发明是采用下述技术方案实现的:
3、第一方面,本发明提供了一种起重机用道路坡度识别装置,包括:
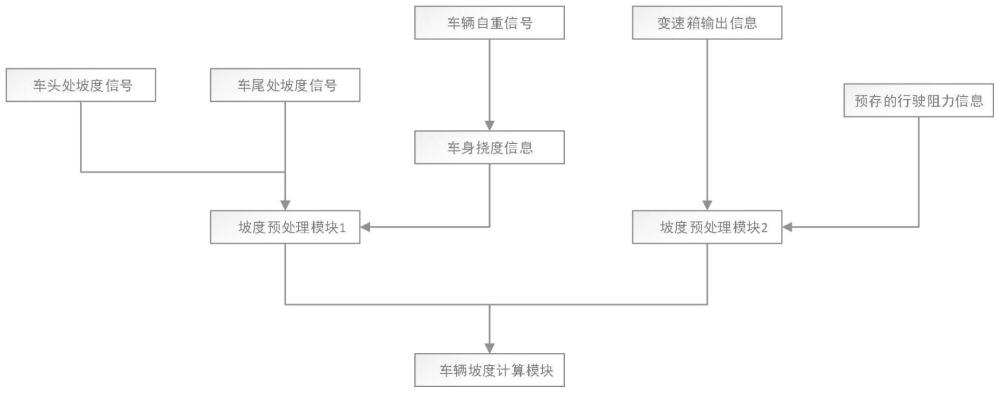
4、设置在车头、车尾的两个角度传感器,用于获取起重机车头、车尾的坡度值;
5、起重机车身控制器,用于检测车辆重量信息;
6、车身挠度-重量计算模块,用于根据获取的车辆重量信息,计算车身挠度信息;
7、坡度修正模块,用于通过车身挠度信息对起重机车头、车尾的坡度值进行修正,获取起重机车头、车尾的坡度修正值;
8、坡度预处理模块1,用于通过起重机车头、车尾的坡度修正值,结合三角形公式,计算得到车辆行驶道路的第一坡度值;
9、坡度预处理模块2,用于根据获取的车辆行驶阻力信息与变速箱输出信息,计算得到车辆行驶道路的第二坡度值;
10、车辆坡度计算模块,用于将第二坡度值与第一坡度值进行对比,计算得到最终的车辆行驶道路坡度值。
11、进一步的,判断模块,用于通过对比起重机车头、车尾的坡度值,判断起重机是完全处在水平路面上、部分在坡道上,还是在坡道上。
12、进一步的,所述角度传感器采用水平仪传感器或陀螺仪传感器。
13、进一步的,所述装置还包括:设置在车身关键部位的多个应变片,用于监控车辆挠度变化。
14、第二方面,本发明提供一种起重机用道路坡度识别方法,包括:
15、获取起重机车头、车尾的坡度值以及车辆重量信息;
16、根据获取的车辆重量信息,计算车身挠度信息;
17、通过车身挠度信息对起重机车头、车尾的坡度值进行修正,获取起重机车头、车尾的坡度修正值;
18、通过起重机车头、车尾的坡度修正值,结合三角形公式,计算得到车辆行驶道路的第一坡度值;
19、根据获取的车辆行驶阻力信息与变速箱输出信息,计算得到车辆行驶道路的第二坡度值;
20、将第二坡度值与第一坡度值进行对比,计算得到最终的车辆行驶道路坡度值。
21、进一步的,所述方法还包括:
22、通过对比起重机车头、车尾的坡度值,判断起重机是完全处在水平路面上、部分在坡道上,还是在坡道上。
23、进一步的,所述方法还包括:
24、通过车辆行驶阻力信息与变速箱输出信息的差值,与车辆行驶道路的第一坡度值进行对比,确认车辆是处于上坡状态还是下坡状态。
25、第三方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现前述任一项所述方法的步骤。
26、第四方面,本发明提供一种计算机装置/设备/系统,包括:
27、存储器,用于存储计算机程序/指令;
28、处理器,用于执行所述计算机程序/指令以实现前述任一项所述方法的步骤。
29、第五方面,本发明提供一种计算机程序产品,包括计算机程序/指令,该计算机程序/指令被处理器执行时实现前述任一项所述方法的步骤。
30、与现有技术相比,本发明所达到的有益效果:
31、1、本发明提供一种起重机用道路坡度识别装置及方法,通过设置在大型起重机车头、车尾两处的角度传感器来检测车身的物理角度,再将车辆行驶过程中车架自身挠度影响、发动机输出功率变化来反推的行驶阻力变化等因素考虑进去后,极大程度提高了车辆面临的道路坡度变化的测算预估准确程度;
32、2、双水平仪传感器可以更加准确的判断出起重机状态;通过判断两个传感器的数值是否存在差异,可以准确的判断起重机是全部在水平地面上、一半在坡上一半在地面上、还是全部在坡上;
33、3、数据计算更加有预见性;车辆自身挠度信息的接入,可以准确计算起重机将要爬的坡道的坡度,计算值不再局限于车辆当前姿态。
- 还没有人留言评论。精彩留言会获得点赞!