一种电梯曳引钢带缺陷检测装置及方法与流程
本发明涉及电梯门故障监测领域,尤其涉及一种电梯曳引钢带缺陷检测装置及方法。
背景技术:
1、近年来,随着城市建设的不断发展,电梯作为垂直交通工具在建筑物中的重要性日益突显。在电梯系统中,曳引钢带作为电梯运行的关键部件,其性能直接关系到电梯的安全、运行效率和使用寿命。曳引钢带的主要功能是传递电梯驱动力,并保持电梯轿厢的平稳运动。传统的电梯曳引钢带通常由内部的多根钢丝和外部的保护层组成,其中保护层一般采用聚氨酯等材料。这种设计具有提高电梯运行效率、降低运行噪音、相对较长的使用寿命和良好的舒适性等优点,因此在曳引电梯中得到广泛应用。然而,由于电梯曳引钢带在频繁使用的过程中,其表面会发生一定程度的磨损,甚至可能出现表面裂缝、钢丝裸露等故障缺陷。这些缺陷可能导致电梯运行不稳定,甚至存在潜在的安全隐患。因此,对在役电梯曳引钢带表面进行快速、高效、定量地检测成为亟待解决的技术难题。
2、目前已有一些相关技术用于电梯曳引钢带的检测,但仍存在一些不足。例如,发明专利“一种精确度较高的钢带平整度测量装置”(申请号202210238942.8)设计给出了一种基于激光传感器的工业钢带的平整度检测装置:1.装置局限性:只能测量钢带平整度,无法检测其他表面缺陷,如划痕、氧化或腐蚀,限制了在应用场景中的全面性。2.技术适用性有限:仅适用于表面完全由钢材构成的钢带,对于其他材质或涂层的钢带无法准确测量,限制了其在多样化应用中的通用性。实用新型专利“一种具有钢带位置检测装置的别墅电梯”(申请号202223267440.2)针对使用曳引钢带的电梯,设计了一种钢带安装位置的检测装置,存在电梯曳引钢带检测不足的问题:装置主要关注安装位置,但无法监测曳引钢带在使用中的表面缺陷或质量问题,限制了对整体质量状态的全面评估。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明目的在于提供一种电梯门故障监测系统和方法,解决了上述提到的技术问题:
3、全面性的缺陷检测:通过引入激光轮廓传感器,该专利能够获取电梯曳引钢带及其附近裸露的中滚轮表面的截面轮廓点云数据,利用点云数据,专利中采用多项步骤进行缺陷检测,包括提取符合条件的点云子集、计算峰峰值、标准差等指标,并判断这些指标是否超过预设的阈值,从而判定是否存在缺陷;
4、通用性的技术适用性:采用激光轮廓传感器获取点云数据,这种技术不仅可以应用于表面完全由钢材构成的钢带,也适用于其他材质或涂层的钢带,点云数据的处理方法不仅限于特定类型的材料,而是基于点云数据的特性,具有一定的通用性。
5、全面性的电梯曳引钢带状态评估:专利中的检测方法不仅仅关注电梯曳引钢带的安装位置,还通过检测表面缺陷,实现了对电梯曳引钢带在使用中整体质量状态的全面评估,通过设定阈值和超限帧数,专利能够判定电梯曳引钢带是否存在破损或磨损的缺陷,从而提供更为全面的质量信息。
6、(二)技术方案
7、为实现上述目的,本发明提供如下技术方案:一种电梯门故障监测系统和方法,包括以下步骤:
8、启动准备:将电梯曳引钢带穿过上滚轮、中滚轮、下滚轮,并固定竖直连接板,启动电梯并启动本发明的电梯曳引钢带缺陷检测装置;
9、数据采集:计算机接收电梯启动信号,设定超限帧数f为0,同时计算机读取激光轮廓传感器一帧的点云数据{(xi,zi)},i=1,2,…,n;
10、点云数据判断:计算机对激光轮廓传感器采集到的一帧点云数据进行判断,判断点云数据数量n是否大于等于设定的值k*m,如果是,则继续;否则,舍弃该帧数据并返回步骤数据采集;
11、点云数据处理:在计算机中计算最大和最小z坐标的平均值并设置筛选条件q,对点云数据进行处理,提取满足特定条件的点,形成点云子集{(x1i,z1i)},并统计满足条件的点的个数w;
12、特征提取:在计算机中针对点云子集{(x1i,z1i)}中的z坐标进行计算,包括平均值峰峰值zd和标准差sz;
13、超限判定:在计算机中判断平均值峰峰值zd、标准差sz是否超限,判断至少有一个指标超限时,将超限帧数f加一并进入下一步,否则回到步骤数据采集;
14、电梯停止判断:判断计算机是否接收到电梯停止信号,如果是,则进入下一步;否则,回到步骤数据采集;
15、缺陷判断:在计算机中判断超限帧数f是否超过给定的阈值fh,当超限帧数f超过给定的阈值fh时,判断该电梯曳引钢带表面存在破损或磨损的缺陷,否则,认为表面合格;
16、结果存储:计算机对所有电梯曳引钢带表面缺陷检测的三维点云和结果进行数字化存储。
17、优选的,步骤数据采集中,包括如下具体步骤:接收电梯启动信号:计算机通过连接到电梯系统的接口或传感器,接收到电梯启动的信号;设定超限帧数f为0:在开始采集点云数据之前,计算机设定用于判断超限的帧数f为0;读取激光轮廓传感器一帧点云数据:计算机与激光轮廓传感器连接,通过通信协议或接口读取一帧点云数据
18、{(xi,zi)},i=1,2,…,n,用以表示当前帧中电梯曳引钢带及其附近裸露的中滚轮表面的截面轮廓。
19、优选的,步骤点云数据处理中,包括如下具体步骤:
20、计算最大和最小的z坐标的平均值:设定为该帧所有点云数据{(xi,zi)}中最大的100个点的z坐标的平均值并计算;设定为该帧所有点云数据{(xi,zi)}中最小的100个点的z坐标的平均值并计算;
21、筛选条件设定:设定筛选条件为q,具体设置为
22、点云数据判断:对于每个点(xi,zi),判断其高度方向坐标zi是否满足筛选条件q,如果满足条件,将该点(xi,zi)添加到点云子集中,形成一个新的集合{(x1i,z1i)},判断为否,则剔除该数据,其中i表示集合中点的索引,i=1,2,…,w,其中w为该帧点云数据中满足上述条件的点的个数。
23、优选的,特征提取步骤中,所有z坐标平均值的表达式为:
24、优选的,特征提取步骤中,所有z坐标的最大值减去最小值得到的峰峰值zd的表达式为:zd=zmax-zmin。
25、优选的,特征提取步骤中,所有z坐标的标准差sz的表达式为:
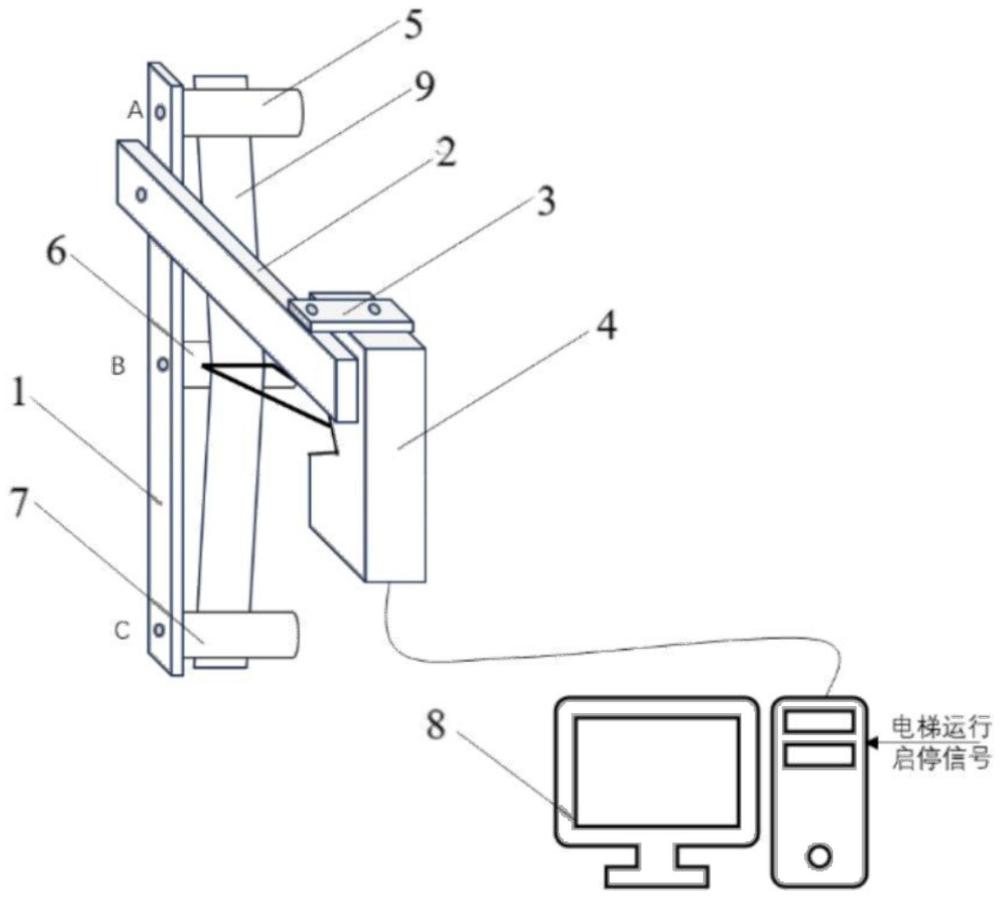
26、一种电梯曳引钢带缺陷检测装置,包括:竖直连接板,所述竖直连接板的左侧上部固定有横向连接板,所述横向连接板的前侧上部固定有转接板,所述转接板的右侧下端固定有激光轮廓传感器,所述竖直连接板的右侧上部、中部和下部依次固定有上滚轮、中滚轮和下滚轮,所述激光轮廓传感器与计算机端电连接;所述激光轮廓传感器发出的线激光与中滚轮的轴线平行。
27、(三)有益效果
28、本发明目的在于提供一种电梯门故障监测系统和方法,通过激光轮廓传感器实现电梯曳引钢带表面缺陷的快速检测,并采用高帧率的数据采集,能够在电梯从最高处运行至最低处并返回的一个往返过程中迅速获取大量数据,并利用计算机进行实时数据处理和分析,通过特定算法判断缺陷,从而在短时间内完成对电梯曳引钢带表面缺陷的检测,该自动化的检测过程降低了人工成本和时间消耗;以及通过及时发现和处理电梯曳引钢带表面的磨损、裂缝等缺陷,可以降低电梯运行中出现故障的风险,减少潜在的安全隐患;该装置对电梯系统几乎没有干扰,不影响电梯正常运行,通过设计合理的装置结构和使用激光技术,确保检测的过程不会对电梯系统造成负面影响。
- 还没有人留言评论。精彩留言会获得点赞!