一种泡沫箱自动化去除胶带回收工艺的制作方法
1.本发明涉及资源回收与再利用领域,尤其是涉及一种泡沫箱自动化去除胶带回收工艺。
背景技术:
2.可发性聚苯乙烯泡沫塑料(eps)被广泛应用于工业、农业等各个生产领域和民用及生活中,其量大面广,制成的泡沫箱广泛用于食品、生物制剂、化工原料等一切需要低温冷藏运输的物品以及玻璃陶瓷等易碎的产品,经使用后的废旧泡沫箱的可回收量也十分巨大。
3.现有技术中对泡沫进行回收利用是先把泡沫箱粉碎成再生颗粒后再进行下一步处理,而作为包装箱,泡沫箱上往往留有对泡沫箱进行封装的胶带,需要去除胶带后对泡沫箱后进行粉碎,得到泡沫碎粒进行回收利用,目前是人工对胶带进行撕除,然后将泡沫箱放入粉碎机进行粉碎处理,费时费力,生产力低下。
技术实现要素:
4.本发明的目的在于提供一种泡沫箱自动化去除胶带回收工艺,以解决了现有技术中需要人工手动撕去泡沫箱上的胶带,耗费大量人力的技术问题。
5.本发明实施例提供了一种泡沫箱自动化去除胶带回收工艺,包括以下步骤:
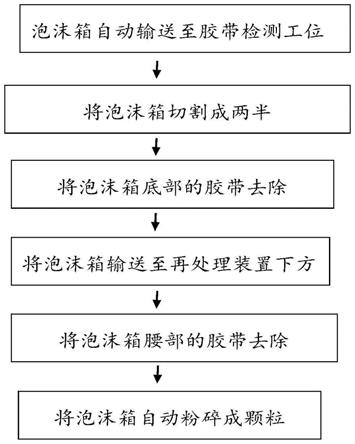
6.步骤1.泡沫箱自动输送至胶带检测工位:设置工作台、传送带、切割装置、分离装置、再处理装置、光学传感器和粉碎箱,首先,将泡沫箱放在传送带上,传送带将泡沫型输送至光学传感器的下方,开口向上的泡沫箱被光学传感器检测箱体上是否存在胶带,光学传感器工作,根据胶带自带的镜面性,通过投光角度不同的第一检知光源、第二检知光源对泡沫箱进行扫描,光信号接收器根据反射光线的接收结果对控制部件发出指令,控制部件对切割装置、分离装置和再处理装置是否工作进行控制;当光学传感器未检测出胶带时,切割装置、分离装置和再处理装置不启动,泡沫箱直接被传送带传送到粉碎箱中进行粉碎;
7.步骤2.将泡沫箱切割成两半:当泡沫箱被光学传感器检测出胶带时,切割装置、分离装置和再处理装置开始工作,泡沫箱被传送带传送到切割装置的位置时,刀片垂直向下,将泡沫箱沿着传送带送方向将泡沫箱分成两半,刀片落下的距离设置为不会接触到传送带,切割好的泡沫箱底部还会有部分连接,以防止泡沫箱底部的胶带被切断;
8.步骤3.将泡沫箱底部的胶带去除:切割工作完成后,传送带将泡沫箱传送到分离装置,在分离装置,分成两半的泡沫箱各自被负压状态的吸盘吸住,分离电机带动左边的一半泡沫箱逆时针旋转,右边的一半泡沫箱顺时针旋转,丝杆电机则带动两半泡沫箱互相远离,分成两半的泡沫箱边旋转边远离,泡沫箱的底部被折断,泡沫箱本体完全分开,粘在泡沫箱底部的胶带被撕下,由于泡沫箱旋转过程中向上运动,胶带来到旋转的第一胶带收集棒,粘在第一胶带收集棒上并被收集在第一胶带收集棒上,由于胶带是不同方向交叉连接的,所以不只是底部的胶带会被揭下,粘在底部胶带上的其他方向的胶带也会被底部胶带
拉起,被底部胶带一并带下来,从而实现对多面的胶带的清除;
9.步骤4.将泡沫箱输送至再处理装置下方:但腰部一圈的胶带若是处于胶带的最底层,没有覆盖在与底部胶带连接的胶带上,则仅靠其他胶带对腰部胶带的粘力很难让腰部胶带拉起,腰部胶带存在残留的可能性,所以在分离装置后设置了再处理装置,对可能存在的腰部胶带进行处理,传送带将彻底分成两半的泡沫箱传送到再处理装置的限位装置处;
10.步骤5.将泡沫箱腰部的胶带去除:然后,通过旋转电机带动限位夹板靠拢,对泡沫箱进行限位,以防止机械爪夹取胶带时推动了泡沫箱从而导致夹取失败,接着移动电缸工作使机械爪向泡沫箱靠拢,机械爪到达泡沫箱后机械爪伸出对胶带处进行夹取,由于泡沫箱去除胶带后是为了粉碎处理,所以机械爪对泡沫箱进行了破坏也不会影响后面的粉碎作业,机械爪夹取了胶带后机械爪升降电缸和移动电缸工作,带动机械爪远离泡沫箱并上升,使胶带被拉动离开泡沫箱,由于机械爪上升,胶带来到第二胶带收集棒处,粘在第二胶带收集棒上并被旋转的第二胶带收集棒收集,然后旋转电机反向旋转,使限位夹板稍微远离,令泡沫箱能够在两块限位夹板之间旋转,使得泡沫箱上腰部一圈的胶带被远离的机械爪拉扯下来,实现对腰部胶带的去除;
11.步骤6.将泡沫箱自动粉碎成颗粒:对泡沫箱多面的胶带清除后,传送带传送泡沫箱来到粉碎箱进行粉碎,获得泡沫颗粒。
12.与现有技术相比较,本发明的有益效果在于:
13.其一,本发明使用时先将泡沫箱切开,然后使用分离电机和螺纹丝杆使分为两半的泡沫箱边互相远离边旋转使位于泡沫箱底部的胶带被揭起,底部的胶带在脱离泡沫箱时,会受到粘在底部胶带上面的其他胶带的阻碍,底部胶带脱离时会将这些胶带拉起,从而使所有胶带脱离泡沫箱,有效的解决了现有技术中需要人力将泡沫箱上的胶带全部清除的技术问题。
14.其二,本发明设有再处理装置,分离装置虽然可以清除去多面上的胶带,但泡沫箱的腰部可能缠有一圈胶带,若是这圈胶带没有粘在底部胶带上方,而是处于底部胶带下,则仅靠其他胶带对腰部胶带的粘力很难让腰部胶带拉起,腰部胶带存在残留的可能性,再处理装置对泡沫箱进行定位,然后使用机械爪对泡沫箱腰部进行抓取,机械爪夹取到胶带后,通过移动电缸使机械爪夹住胶带远离泡沫箱,使胶带从泡沫箱上撕下,从而实现对泡沫箱上多面胶带的彻底清除。
15.其三,本发明设有第一胶带收集棒和第二胶带收集棒,使用时通过驱动第一胶带收集棒和第二胶带收集棒旋转,从而使剥离的胶带接触到第一胶带收集棒和第二胶带收集棒后,收集在第一胶带收集棒和第二胶带收集棒上,从而实现对胶带的收集。
16.其四,本发明的工艺设计巧妙,工序间衔接顺畅,实现了泡沫箱自动输送至胶带检测工位、将泡沫箱切割成两半、将泡沫箱底部的胶带去除、将泡沫箱输送至再处理装置下方、将泡沫箱腰部的胶带去除以及将泡沫箱自动粉碎成颗粒,自动化程度高,实现了泡沫箱自动化去除胶带回收的自动化工艺,一个人可以负责一条生产线,产能大幅提高,获得的泡沫颗粒纯度高,不含胶带,产品品质大大提升,具有显著的经济价值。
附图说明
17.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体
实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
18.图1为本发明的侧视图;
19.图2为本发明的整体结构示意图;
20.图3为本发明中切割装置的立体结构示意图;
21.图4为本发明中切割装置去掉第二固定板的爆炸示意图;
22.图5为本发明中分离装置的后视图;
23.图6为本发明中分离装置去掉第一固定板的立体图;
24.图7为本发明中再处理装置的俯视图;
25.图8为本发明中限位装置的立体结构示意图;
26.图9为本发明中夹取装置的立体结构示意图;
27.图10至图12为本发明中光学传感器的原理示意图;
28.图13为本发明的工艺流程图。
29.附图标记:工作台1、传送带2、切割装置3、第二固定板31、卡止推块311、拉环3111、齿轮32、齿轮驱动电机33、刀片34、刀片固定块35、滑动凹槽351、分离装置4、第一固定板41、梯形凹槽411、气泵42、分离管43、吸盘431、分离电机44、电机容纳箱45、限位管451、梯形凸块452、螺纹丝杆46、丝杆电机47、第一胶带收集棒48、第一胶带收集电机49、再处理装置5、第二胶带收集棒51、第二胶带收集电机52、限位装置53、限位夹板531、限位滑块532、固定轴533、旋转条534、滑杆535、旋转电机536、夹取装置54、机械爪541、夹持爪5411、夹持爪驱动装置5412、机械爪升降电缸542、移动电缸543、光学传感器6、第一检知光源61、第二检知光源62、光信号接收器63、控制部件64、粉碎箱7。
具体实施方式
30.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。
31.通常在此处附图中描述和显示出的本发明实施例的组件可以以各种不同的配置来布置和设计。因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。
32.基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
34.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是
两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
35.下面结合图1至图13所示,本发明实施例提供了一种泡沫箱自动化去除胶带回收工艺,包括以下步骤:
36.步骤1.泡沫箱自动输送至胶带检测工位:设置工作台1、传送带2、切割装置3、分离装置4、再处理装置5、光学传感器6和粉碎箱7,将泡沫箱放在传送带2上,传送带2将泡沫型输送至光学传感器6的下方,首先是开口向上的泡沫箱被光学传感器6检测箱体上是否存在胶带,光学传感器6工作,根据胶带自带的镜面性,通过投光角度不同的第一检知光源61、第二检知光源62对泡沫箱进行扫描,光信号接收器63根据反射光线的接收结果对控制部件64发出指令,控制部件64对切割装置3、分离装置4和再处理装置5是否工作进行控制;当光学传感器6未检测出胶带时,切割装置3、分离装置4和再处理装置5不启动,泡沫箱直接被传送带2传送到粉碎箱7中进行粉碎;
37.步骤2.将泡沫箱切割成两半:当泡沫箱被光学传感器6检测出胶带时,切割装置3、分离装置4和再处理装置5开始工作,泡沫箱被传送带2传送到切割装置3的位置时,刀片34垂直向下,将泡沫箱沿着传送带2传送方向将泡沫箱分成两半,刀片34落下的距离设置为不会接触到传送带2,切割好的泡沫箱底部还会有部分连接,以防止泡沫箱底部的胶带被切断;
38.步骤3.将泡沫箱底部的胶带去除:切割工作完成后,传送带2将泡沫箱传送到分离装置4,在分离装置4,分成两半的泡沫箱各自被负压状态的吸盘431吸住,分离电机44带动左边的一半泡沫箱逆时针旋转,右边的一半泡沫箱顺时针旋转,丝杆电机47则带动两半泡沫箱互相远离,分成两半的泡沫箱边旋转边远离,泡沫箱的底部被折断,泡沫箱本体完全分开,粘在泡沫箱底部的胶带被撕下,由于泡沫箱旋转过程中向上运动,胶带来到旋转的第一胶带收集棒48,粘在第一胶带收集棒48上并被收集在第一胶带收集棒48上,由于胶带是不同方向交叉连接的,所以不只是底部的胶带会被揭下,粘在底部胶带上的其他方向的胶带也会被底部胶带拉起,被底部胶带一并带下来,从而实现对多面的胶带的清除;
39.步骤4.将泡沫箱输送至再处理装置下方:但腰部一圈的胶带若是处于胶带的最底层,没有覆盖在与底部胶带连接的胶带上,则仅靠其他胶带对腰部胶带的粘力很难让腰部胶带拉起,腰部胶带存在残留的可能性,所以在分离装置4后设置了再处理装置5,对可能存在的腰部胶带进行处理,传送带2将彻底分成两半的泡沫箱传送到限位装置53;
40.步骤5.将泡沫箱腰部的胶带去除:然后,通过旋转电机536带动限位夹板531靠拢,对泡沫箱进行限位,以防止机械爪541夹取胶带时推动了泡沫箱从而导致夹取失败,接着移动电缸543工作使机械爪541向泡沫箱靠拢,机械爪541到达泡沫箱后机械爪541伸出对胶带处进行夹取,由于泡沫箱去除胶带后是为了粉碎处理,所以机械爪541对泡沫箱进行了破坏也不会影响后面的粉碎作业,机械爪541夹取了胶带后机械爪升降电缸542和移动电缸543工作,带动机械爪541远离泡沫箱并上升,使胶带被拉动离开泡沫箱,由于机械爪541上升,胶带来到第二胶带收集棒51处,粘在第二胶带收集棒51上并被旋转的第二胶带收集棒51收集,然后旋转电机536反向旋转,使限位夹板531稍微远离,令泡沫箱能够在两块限位夹板531之间旋转,使得泡沫箱上腰部一圈的胶带被远离的机械爪541拉扯下来,实现对腰部胶带的去除;
41.步骤6.将泡沫箱自动粉碎成颗粒:最后,对泡沫箱多面的胶带清除后,传送带2传送泡沫箱来到粉碎箱7进行粉碎,获得泡沫颗粒。
42.优选的,所述传送带2、所述切割装置3、所述分离装置4和所述再处理装置5皆设于所述工作台1上,所述传送带2依次穿过所述切割装置3、所述分离装置4和所述再处理装置5,所述光学传感器6设于所述切割装置3上,所述光学传感器6的识别端朝向所述传送带2的进料端,所述粉碎箱7设于所述传送带2的出料端,开口向上的泡沫箱通过传送带2送料,泡沫箱先被光学传感器6识别箱体上面是否存在胶带,若是箱体上没有胶带,切割装置3、分离装置4和再处理装置5不工作,泡沫箱被传送带2传送依次穿过切割装置3、分离装置4和再处理装置5,直接来到粉碎箱7中进行粉碎;当检测到泡沫箱表面上的胶带时,切割装置3、分离装置4和再处理装置5开始启动,泡沫箱先由传送带2传送到切割装置3,切割装置3从泡沫箱的正上方垂直下降将泡沫箱切割成两半,但切割装置3的切割距离设置为不接触到传送带2表面,使得泡沫箱的底面还有一部分连接,泡沫箱并没有完全一分为二;接着泡沫箱被传送带2传送到分离装置4,分离装置4将泡沫箱的胶带揭下,然后泡沫箱到达再处理装置5,再处理装置5则对可能残留在泡沫箱上的胶带进行处理,对泡沫箱上的胶带清理完全后,再通过传送带2将泡沫箱送到粉碎箱7进行粉碎。
43.优选的,所述分离装置4包括第一固定板41、气泵42、分离管43、分离电机44、电机容纳箱45、螺纹丝杆46、丝杆电机47、第一胶带收集棒48和第一胶带收集电机49,所述气泵42、所述电机容纳箱45、所述螺纹丝杆46和所述丝杆电机47皆设置在所述第一固定板41上,所述气泵42、所述分离管43、所述分离电机44和所述电机容纳箱45皆设有两个,所述气泵42与所述分离管43的内部空腔连通,所述分离管43靠近所述传送带2的一端设有吸盘431,所述分离管43与所述分离电机44传动连接,所述分离电机44设在所述电机容纳箱45内,所述螺纹丝杆46与所述丝杆电机47传动连接,所述电机容纳箱45上设有限位管451,所述限位管451上设有内螺纹,所述螺纹丝杆46表面设有螺纹,所述螺纹丝杆46上两侧的螺纹呈反向设置,所述限位管451的内螺纹与所述螺纹丝杆46表面的螺纹相互配合,所述第一胶带收集棒48和所述第一胶带收集电机49驱动连接,所述第一胶带收集棒48设于所述第一固定板41的中部。由于螺纹丝杆46上两侧的螺纹呈反向设置,所以通过改变丝杆电机47旋转方向,就能实现电机容纳箱45的相互靠拢或相互分离,在工作时,气泵42使分离管43内呈负压状态,从而使得分离管43能够通过吸盘431将泡沫箱吸附起来,分离电机44驱动分离管43向着第一胶带收集棒48旋转,丝杆电机47驱动螺纹丝杆46旋转使得电机容纳箱45相互远离,带动分离电机44和分离管43相互远离,使得分离管43带动泡沫箱边相互远离边向第一胶带收集棒48旋转,泡沫箱底部被分离,泡沫箱底部的胶带在分为两半的泡沫箱相向旋转的作用下从泡沫箱底部被扯下。同时第一胶带收集电机49驱动第一胶带收集棒48旋转,胶带由于泡沫箱旋转而上升到第一胶带收集棒48,胶带与泡沫箱分离后粘在第一胶带收集棒48上,第一胶带收集棒48旋转,和泡沫箱相向旋转共同作用,将胶带从泡沫箱底部开始,完全从泡沫箱上扯下,扯下的胶带粘在了第一胶带收集棒48上,实现了对胶带的收集处理。
44.优选的,所述切割装置3包括第二固定板31、齿轮32、齿轮驱动电机33、刀片34和刀片固定块35,所述第二固定板31设在所述工作台1上,所述刀片固定块35设在所述第二固定板31上,所述刀片固定块35设有容纳所述刀片34的滑动凹槽351,所述齿轮驱动电机33设在所述第二固定板31上,所述齿轮驱动电机33与所述齿轮32传动连接,所述刀片34的刀口设
于所述刀片34的下方,所述刀片34的两侧设有齿牙,所述刀片34设置于所述刀片固定块35和所述齿轮32之间,所述刀片34靠近所述齿轮32的一侧上的齿牙与所述齿轮32相互啮合。工作时,通过齿轮驱动电机33,驱动齿轮32旋转,齿轮32通过和刀片34相互啮合的齿牙驱动刀片34,齿轮32旋转方向不同,实现刀片34的上升和下降。
45.优选的,所述再处理装置5包括第二胶带收集棒51、第二胶带收集电机52、限位装置53和夹取装置54,所述第二胶带收集棒51和所述第二胶带收集电机52传动连接,所述第二胶带收集电机52设在所述限位装置53上,所述夹取装置54包括机械爪541、机械爪升降电缸542和移动电缸543,所述机械爪541和所述机械爪升降电缸542传动连接,所述机械爪升降电缸542设在移动电缸543的输出端,所述机械爪541由两个夹持爪5411和驱动两个所述夹持爪5411靠拢与分开的夹持爪驱动装置5412组成。当泡沫箱经过分离装置4后,粘在泡沫箱底部的胶带以及和泡沫箱底部胶带存在粘接的胶带会被一并撕下,然而,在泡沫箱的腰部一圈若是存在胶带,由于腰部胶带没有位于泡沫箱底部的部分,当腰部胶带覆盖着其他方向的胶带时,其他方向的胶带被拉起时会受到腰部胶带的阻碍,从而将腰部胶带也带着脱离泡沫箱,而当腰部胶带如果处于所有胶带最里层的话,容易出现粘在腰部胶带上的胶带从泡沫箱上撕下,由于其他方向的胶带没有被腰部胶带压住,而没有带着腰部胶带脱离泡沫箱的情况,存在胶带未撕干净的可能,所以设置再处理装置5对可能还残留的腰部胶带进行处理。再处理装置5工作时,首先限位装置53对泡沫箱进行限位,方便机械爪541对泡沫箱腰部的胶带进行夹取,移动电缸543驱动机械爪升降电缸542和机械爪541靠近限位装置53伸到泡沫箱上,夹持爪5411穿过泡沫箱,夹持爪驱动装置5412驱动夹持爪5411靠拢夹住胶带,在移动电缸543的驱动下,机械爪541夹着胶带开始离开泡沫箱,使胶带从泡沫箱上被扯下,同时机械爪升降电缸542驱动机械爪541向上运动,使被分离的胶带与第二胶带收集棒51接触,第二胶带收集电机52驱动第二胶带收集棒51旋转,胶带粘在旋转的第二胶带收集棒51上,实现对胶带的集中处理。
46.优选的,所述限位装置53包括限位夹板531、限位滑块532、固定轴533、旋转条534、滑杆535和旋转电机536,所述固定轴533安装在工作台1上,所述旋转电机536设在所述工作台1上,所述旋转电机536与所述旋转条534传动连接,所述滑杆535设有两根,所述滑杆535的一端与所述旋转条534活动连接,所述滑杆535的另一端设于所述限位夹板531上,所述限位滑块532设在所述限位夹板531上,所述限位滑块532上设有容纳所述固定轴533的通孔,所述限位滑块532在所述固定轴533上滑动。工作时,旋转电机536旋转驱动旋转条534绕着旋转电机536旋转,在旋转条534两端活动连接的滑杆535根据旋转电机536的旋转方向,拉动限位夹板531向内靠拢或是向外推动限位夹板531,从而实现限位夹板531靠拢对泡沫箱进行限位以及限位夹板531的复位。
47.优选的,所述第二固定板31上设有卡止推块311,所述刀片固定块35上设有容纳所述卡止推块311的通孔,所述刀片34靠近所述刀片固定块35的一侧设有凹槽,所述卡止推块311上设有与所述刀片34的凹槽相啮合的凸起。当机器发生故障时或者出现危险时,推动卡止推块311使卡止推块311上的凸起卡着刀片34上的凹槽,即可完成对刀片34的锁止,以保障人员的安全。
48.优选的,所述卡止推块311在背对所述刀片34的一面上设有拉环3111。在对推块进行锁止后,通过拉动拉环3111可以对卡止推块311进行复位,使得对刀片34的卡止和解除锁
止都很方便快捷。
49.优选的,所述电机容纳箱45上设有梯形凸块452,所述第一固定板41上设有容纳所述梯形凸块452的梯形凹槽411。这使得电机容纳箱45在第一固定板41上活动式限位,使电机容纳箱45的移动更加平稳。
50.优选的,所述光学传感器6包括第一检知光源61、第二检知光源62、光信号接收器63和控制部件64,所述光信号接收器63和所述控制部件64电性连接,所述第一检知光源61发出的光线与所检测的泡沫箱所在平面之间的夹角大于0度小于90度,所述的第二检知光源62发出的光线与所检测的泡沫箱所在平面相垂直,所述的第一检知光源61、光信号接收器63位于所述的第二检知光源62的两侧,第一检知光源61和第二检知光源62用于对泡沫箱表面进行光学投射,通过投光角度不同的第一检知光源61、第二检知光源62检测胶带自带的镜面性和胶带边缘,判断有无胶带,通过第一检知光源61、第二检知光源62的红外反射光,检测胶带及其位置,通过第一检知光源61、第二检知光源62的rgb反射光,检测胶带带及其位置,光学控制部件64对光线接收部件63接收的结果发出指令,将胶带画像结果反馈到显示部件上进行显示,对泡沫箱上是否有胶带进行显示,光信号接收器63接收从泡沫箱上的反射光线信号,并将信号传递给控制部件64,使控制部件64对切割装置3、分离装置4和再处理装置5是否开始工作进行控制。
51.最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1