开口型舒适提手模具结构的制作方法
1.本实用新型属于模具结构技术领域,具体涉及一种开口型舒适提手模具结构。
背景技术:
2.目前,市面上食用油,饮料,调味品等包装瓶都会使用一种提手方便使用者提住,这种提手一般由套环部分1、手提部分12,以及他们之间的连接带11构成,市面上的这种提手模具的脱模方式大致分为二种:
3.一种是用于生产提手所有面均是脱模正斜度的提手模具(见附图26),手提部位12一般是竖立的片状体(见附图1),这也就是市面上最常见到的提手,这种提手的每一个面相对开模方向同样也是脱模方向都是正斜度,这种提手模具的脱模只需模具开模后正常顶出提手脱离模具即完成一个完整的脱模过程(见附图26),由于所有面都是正脱模斜度,所以提手的手提部位12只能做成竖立的片状体。这种结构的提手在消费者使用的时候一直有被这个片状体两端13咯到手而感觉疼痛的问题,但因为生产效率高,模具结构简单体积小,生产成本低所以一直占据着提手产品行业的主导地位。
4.另一种是用于生产提手套环部位1、连接带部位11正脱模斜度但手提部位12为负脱模斜度的提手模具(见附图27),此提手手提部位为横截面为u型的环形开口14结构,此结构也是本实用新型中环形开口结构提手中的一种,u型的环形开口14部位脱模方向与开模方向垂直或接近垂直,这种提手模具的脱模方式一般为模具开模后,通过驱动机构61驱动滑块6,滑块6带动u型内芯棒4滑出,然后顶出提手脱离模具完成一个完整的脱模步骤(见附图27),由于滑块6及u型内芯棒4滑动时全过程是不离开模具型腔板的,也就是与模具型腔板的距离一直是0的,为了滑动时不撞到模具型腔板,这种提手u型部位的开口宽度的设计必须等于或者大于u型芯棒4的最大厚度,这种提手由于手提部分12是u型的(见附图3),手提部分12为与使用者手接触受力的部位是圆弧形过渡的,所以这种提手提着就没那么咯手了,但本实用新型人实际测试后发现u型底部虽然不咯手了,但u型开口两端边缘还是会有点咯手,毕竟人的手指弯曲后的内部空间更接近于一个整圆型,但总体舒适度比第一种舒适了很多。这个提手的模具缺点是模具必须有滑块结构6和驱动滑块的机械结构61,这种结构对模具的精度要求非常高,模具成本会直线上升,而且多一个滑块驱动移动步骤导致生产速度也直线下降,模具寿命降低,另外滑块6和驱动结构61会占用很大的体积,所以同样的模具长宽尺寸腔数就不能做多,最后导致产品成本高很多所以在市面上也只能是小众化产品不能大批量推广。
5.本实用新型人在2020年6月12日提交的申请号为202021084876.6的“能依靠弹性收缩和扩展并自动契合手型的开口型舒适提手”实用新型专利,此提手的手提部分12为c型环形开口结构(见附图2),也是属于本实用新型环形开口结构的一种,经过本实用新型人实际测试后感觉这个外形接近圆形的c型形状是最适合人体手指弯曲后的形状,不管如何用力提都不会有边缘咯手的感觉并且随着用力加大c型的环形开口还会内缩以更适合人体手指弯曲的手型,但由于c型芯棒4直径(见附图2中的h7)大于c型的环形开口了(见附图2中的
h6),所以如果按第二种滑块结构的方式做,c型内芯棒拔出c型部分时就会撞到模具型腔,显然使用第二种做法做这种开口小内部大的结构是不合理的,当然还有一种做法就是c型内芯棒4使用滑块6不从c型的环形开口14抽出而是从c型部分轴向抽出(见附图28),这种结构滑块6的移动行程必须大于手提部分12的轴向长度,正常人的手掌宽度基本上都超过80mm,所以提手的这个宽度加上边缘宽度加上机构余量至少都超过110mm了,如此长的滑块行程,加上又是通用化大批量应用的产品,模具设计人员基本都是避开这种设计的,因为导致的模具成本、体积、生产效率和产品生产成本都是很高的,根本就不适合大批量低成本的生产。关于本人在2020年6月12日提交的申请号为202021084876.6的“能依靠弹性收缩和扩展并自动契合手型的开口型舒适提手”实用新型专利,本实用新型人针对这个提手也是先设计好模具脱模结构,并制作测试模具经过多次实际生产试验论证了可行性才递交了专利,所以这个提手的本质在于必须要先设计好模具脱模结构才能生产出这个提手,否则就如同空中楼阁一般只是有设计图稿但不能进行实际生产而毫无意义。
技术实现要素:
6.一种开口型舒适提手模具结构,包括模具静型腔板和模具动型腔板,所述开口型舒适提手上具有环形开口,其特征在于:所述模具静型腔板和模具动型腔板上设有与型腔适配的芯棒,所述芯棒相对于模具静型腔板或模具动型腔板之间可以在零到脱模间距内做直线或者曲线相对运动,其目的是使开模后芯棒带动环形开口脱离模具静型腔板或者模具动型腔板并形成预定的间距h,此间距h可以使所述的环形开口脱离芯棒的时候与模具静型腔板或者模具动型腔板之间不会产生干涉,此间距h可以使所述的芯棒在脱离环形开口的时候与模具静型腔板或者模具动型腔板之间不会产生干涉,此间距h也可以容纳所述的环形开口在脱离芯棒时所产生被撑大的膨胀空间,此间距h也可以使所述的环形开口绕芯棒或者与芯棒一起往开模方向旋转而不会与模具静型腔板或者模具动型腔板产生干涉。
7.所述芯棒可以与环形开口一起自由旋转,开模后芯棒与环形开口一起旋转的方向趋向于开模方向或者脱模正方向,其目的是使环形开口脱离芯棒的方向不与模具静型腔板或者模具动型腔板产生干涉。
8.所述芯棒设计为整圆,环形开口可以绕芯棒旋转也可以与芯棒一起旋转,环形开口的壁厚设计成开口部位厚度最薄,越向中部越厚,使得环形开口在绕芯棒旋转或与芯棒一起旋转预定的角度后与模具静型腔板或者模具动型腔板之间产生预定的间隙,另外也使环形开口脱离芯棒的方向角度趋向于开模方向而不与模具静型腔板或者模具动型腔板产生干涉。
9.所述芯棒通过安装弹簧在开模的时候辅助芯棒带动环形开口快速的离开模具静型腔板或者模具动型腔板并形成间距h。
10.所述芯棒使用驱动机构在开模时直接驱动芯棒带动环形开口快速离开模具静型腔板或者模具动型腔板并形成间距h。
11.所述芯棒设置顶杆顶动芯棒带动环形开口离开模具静型腔板或者模具动型腔板并形成间距h。
12.所述芯棒带动环形开口在脱离模具静型腔板或者模具动型腔板并形成间距h后,可以使用驱动机构驱动芯棒做设定方向的直线或者曲线移动。
13.所述芯棒与顶杆安装在同一组,顶杆设置多级顶出方式分级顶出提手。
14.所述套环部分与套环内芯之间通过设计具有落差的凹凸槽使其相互之间具有卡合力,其目的是使环形开口脱离芯棒时能被套环内芯卡合住的套环部分通过连接带拉拽住,此卡合力小于于模具顶出力。
15.本实用新型的有益效果为:本实用新型在不降低生产效率和不提高生产成本的前提下解决了提手手提部位截面为环型开口结构的负脱模斜度的提手的脱模的问题。
附图说明
16.图1、通用型全部正脱模斜度的提手的立体示意图;
17.图2、本实用新型手提部位c型负脱模斜度的提手的结构示意图;
18.图3、本实用新型手提部位u型负脱模斜度的提手的结构示意图;
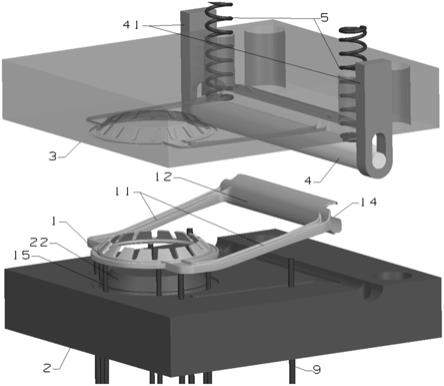
19.图4、本实用新型手提部分环形开口的模具合模状态结构示意图;
20.图5、本实用新型手提部分环形开口的模具开模状态结构示意图;
21.图6、本实用新型手提部分环形开口的模具开模状态结构示意图;
22.图7、本实用新型手提部分环形开口的模具开模状态结构示意图;
23.图8、本实用新型手提部分环形开口的模具开模状态结构示意图;
24.图9、本实用新型手提部分环形开口的模具开模状态结构示意图;
25.图10、本实用新型手提部分环形开口的模具顶出状态结构示意图;
26.图11、本实用新型手提部分环形开口的模具开模状态结构示意图;
27.图12、本实用新型手提部分环形开口的模具多级顶出状态结构示意图;
28.图13、本实用新型手提部分环形开口的模具多级顶出状态结构示意图;
29.图14、本实用新型手提部分环形开口的模具多级顶出状态结构示意图;
30.图15、本实用新型手提部分环形开口的模具合模状态结构示意图;
31.图16、本实用新型手提部分环形开口的模具开模状态结构示意图;
32.图17、本实用新型手提部分环形开口的模具顶出状态结构示意图;
33.图18、本实用新型手提部分环形开口的模具多级顶出状态结构示意图;
34.图19、本实用新型手提部分环形开口的模具多级顶出状态结构示意图;
35.图20、本实用新型手提部分环形开口的模具开模状态结构示意图;
36.图21、本实用新型手提部分环形开口的模具开模状态结构示意图;
37.图22、本实用新型手提部分环形开口的模具开模状态结构示意图;
38.图23、本实用新型手提部分环形开口的模具开模状态结构示意图;
39.图24、本实用新型手提部分环形开口的模具顶出状态结构示意图;
40.图25、本实用新型手提部分环形开口脱模变形结构示意图;
41.图26、通用型正脱模斜度提手模具顶出状态结构示意图;
42.图27、手提部分环形开口的模具通过驱动滑块脱模的结构示意图;
43.图28、手提部分环形开口的模具通过驱动滑块脱模的结构示意图;
具体实施方式
44.下面结合附图对发明的具体实施方式作进一步的详细说明。
45.为了彻底了解本实用新型实施例,将在下列的描述中提出详细的结构和方式。显然,本实用新型实施例的施行并不限定于本领域的技术人员所熟习的特殊细节。本实用新型的较佳实施例详细描述如下,然而除了这些详细描述外,本实用新型还可以具有其他实施方式。
46.见图4至图24,一种开口型舒适提手模具结构,所述的开口型舒适提手分为套环部分1、手提部分12和套环部分1与手提部分12之间的连接带11,套环部分1与连接带11部分的脱模方向一致,也与模具的开模方向一致属于脱模正方向,手提部分12的横截面为一环形开口14,环形中心与开口中心连线与开模方向垂直或者接近垂直为负脱模方向,开口型舒适提手为一次性一体成型,材质为具有弹性的塑胶材质。本实用新型针对开口型舒适提手的手提部分12的环形开口14设计模具脱模方式。要实现本实用新型的脱模方式需用到成型所需的模具静型腔板3、模具动型腔板2以及环形开口14的内衬芯体(以下简称芯棒4)和模具的顶杆9,模具合模状态下,芯棒4被模具静型腔板3和模具动型腔板2夹紧并形成环形开口14的注胶空间。为了说明脱模方式,定义机器开模时静止部分为静板组其包括模具静型腔板3,运动部分为动板组其包括模具动型腔板2,合模状态下动板组和静板组是合在一起并形成一副完整的模具,开模状态下动板组和静板组是分开的,另外需说明的是注射成型后的套环部分1与套环内芯22之间通过设计一定落差的凹凸槽15使其具有一定的卡合力,此卡合力不能大于模具顶出力但需大于环形开口14脱离芯棒4的力。另外开口型舒适提手可以分正反面,一般而言套入容器后朝上的为正面,朝下为反面,开口型舒适提手相对模具方向来说正反面都是可以制作的,如果正面对应模具静型腔板3则套环内芯22安装在模具动型腔板2上,如果正面对应模具动型腔板2则提手的套环内芯22安装在模具静型腔板3上,同理顶杆9也可以顶在提手正面也能顶在提手反面,以下方式都以顶杆顶提手反面进行举例,如顶杆顶提手正面的,只是提手相对模具换个方向,其余部分脱模结构也都一样。
47.以下详细讲述本实用新型的几种实施方式:
48.第一种方式(图4-图10):芯棒4通过定位机构41安装于模具静板组,使其能相对于模具静型腔板3做零到脱模距离的直线(图5)或者曲线运动(图8),芯棒4也能通过定位机构41自旋转(图7),模具在合模状态下芯棒4会被模具静型腔板3和模具动型腔板2压住,此时芯棒4和模具静型腔板3之间的距离为零(图4),芯棒4与模具静型腔板3和模具动型腔板2之间形成环形开口14的注胶空间(图4),产品注塑成型完成后模具开始开模,芯棒4与模具静板组之间通过安装辅助弹簧5用来推动芯棒4(图5),或使用驱动机构直接带动芯棒4(图22),或使用顶出机构顶出芯棒4(图13),其目的是使芯棒4在开模的同时带着环形开口14更快的离开模具静型腔板3直到被定位机构41限位(图5-图8),此时提手的套环部分1被套环内芯22通过凹凸槽15卡合住而使套环部分1固定在模具动型腔板2上,而环形开口14依然包裹着芯棒4(图5),由于芯棒4相对模具静型腔板3的移动已经被限位,随着开模的继续,芯棒4会带着环形开口14离开模具动型腔板2,在离开的同时环形开口14会被连接带11拉拽着绕芯棒4或者与芯棒4一起朝开模方向转动(图6,图7),而套环部分1则被套环内芯22卡合住继续留在模具动型腔板2上,此时环形开口14与套环部分1在开模方向上会分开一定距离(图6),即环形开口14的开始脱模距离,同时连接着套环部分1和手提部分12的连接带11相对开模方向形成一个角度(图6,图7,图8),此角度随开模距离的增大也会更接近于开模方向(图9),此时环形开口14与模具静型腔板3之间有了足够的分离间距(图6,图7,图9,图20,图22
中的h)而不会造成脱模干涉,直到模具的开模宽度超过了连接带11拉伸长度极限,环形开口14就开始从芯棒4上强制拔出,拔出的方向与连接带11平行或接近平行(图9),此方向也更接近开模的方向,对于芯棒4直径(图2中的h7)大于环形开口14的开口宽度(图2中的h6)的提手,芯棒4拔出的时候环形开口14的开口会被撑开(图9),环形开口14外围直径会增大(图9),而此时芯棒4已经和模具静型腔板3有了一定的间距(图6,图7,图9,图20,图22中的h),此间距已经足够容纳环形开口14外围增大了的直径,并且环形开口14包裹着芯棒4偏向于开模方向旋转了一定的角度,所以环形开口14脱离芯棒4已无任何干涉,随着开模继续环形开口14就可以完整的脱离芯棒4(图10),由于提手使用的是带有弹性的塑胶材料,所以拔出后的环形开口14会恢复原状。模具开模完成后提手套环部分1依旧被模具动型腔板2上的套环内芯22通过凹凸槽15卡合住,直到顶杆9把提手套环部分1顶离套环内芯22以完成一个完整的脱模程序(图10)。上述结构如果不加芯棒4和模具静板组之间的弹簧5或者机械驱动,开模的时候芯棒4也会被连接带11的拉拽作用给拉离模具静型腔板3直到定位机构41限位而停止,只是这个方式偶尔会出现芯棒4脱离模具静型腔板3不顺畅而导致产品脱模后环形开口14变形(图25)的问题,对变形度要求不高的也可以采用。
49.第二种方式(图11-图14):芯棒4通过定位机构41安装于模具动板组,使其能相对于模具动型腔板2做零到一定距离的直线或者曲线运动,芯棒4也能通过定位机构自旋转,模具在合模状态下芯棒4会被模具静型腔板3和模具动型腔板2压住,此时芯棒4和模具动型腔板2之间距离为零,芯棒4与模具静型腔板3和模具动型腔板2之间形成环形开口14的注胶空间。产品注塑成型完成后模具开始开模,芯棒4与模具动板组之间可以通过安装弹簧5用来推动芯棒4,或者使用驱动机构带动芯棒4,或者设置顶杆顶动芯棒4(图13),其目的是使芯棒4在开模的同时带着环形开口14更快的离开模具动型腔板2直到芯棒4被定位机构41限位才停止(图11),此时的状态是环形开口14跟随芯棒4离开了模具动型腔板2一定间距(图11中的h),而套环部分1通过凹凸槽15依旧被卡合在动型腔板2上的套环内芯22上(图11),直到开模停止运行顶出程序,顶出程序可以分为多级顶出,第一级为顶杆9顶动连接带11使其改变角度并拉拽环形开口14使环形开口14绕芯棒4旋转或者与芯棒4一起偏向于开模方向旋转(图12),对于芯棒4直径(图2中的h7)大于环形开口14的开口宽度(图2中的h6)的提手,芯棒4拔出的时候环形开口14的开口会被撑开,环形开口14外围直径会增大,而由于此时芯棒4已经带着环形开口14离开了模具动型腔板2一定间距(图11中的h),并偏向于开模方向旋转了一定的角度,所以环形开口14和动型腔板2之间的间距(图11中的h)已经足够容纳环形开口14外围增大了的直径,随着顶杆9继续顶动连接带11,环形开口14就可以完整的脱离芯棒4(图13),由于提手使用的是带有弹性的塑胶材料,所以拔出后的环形开口14会恢复原状,环形开口14拔出芯棒4后,套环部分1依旧卡合在套环内芯22上(图13),此时再运行第二级顶出程序将套环部分1顶出套环内芯22使提手完全脱离(图14),以上如果不先顶连接带11而是全部顶杆9一起顶出,可能的结果就是套环部分1被提前顶出套环内芯22,使套环内芯22不能卡合住套环部分1而失去对连接带11的牵绊作用,结果会导致环形开口14直接绕芯棒4被顶动旋转而不能脱离。上述结构如果不加芯棒4和模具动板组之间的弹簧5助力或者机械驱动,也可以采用比上述顶出方式再多加一级的顶出方式来进行脱模,其方式是设置多级顶出,第一级为顶杆9顶出芯棒4,芯棒4带动环形开口14脱离模具动型腔板2直到顶出停止或者芯棒4被限位停止,接下第二级和第三级的顶出就同上述所述顶出方式的
第一级和第二级一样就不再叙述。上述结构如果不加芯棒4和模具动板组之间的弹簧5助力,也不设置顶出芯棒4结构,开模完成后直接启动一级顶出程序,那顶杆9顶动连接带11的时候芯棒4也会被连接带11的拉拽作用给拉离模具动型腔板2直到限位而停止,只是这个方式偶尔会出现芯棒4脱离模具动型腔板2不顺畅而导致产品环形开口14脱模变形(图25)的问题,对变形度要求不高的也可以采用。
50.第三种方式(图15-图19):芯棒4设计为整圆,芯棒4可以自由旋转,环形开口14可以绕芯棒4一起旋转也可以在芯棒4静止下绕其旋转,环形开口14的横截面壁厚设计成开口部位厚度最薄(图15中的h1),越向中部越厚(图15中的h2),其目的是环形开口14在旋转一定角度后会使其与模具静型腔板3或者模具动型腔板2之间产生一定的间隙(图16中的h3,图18中的h4)。此种方式的芯棒4可以安装在模具静板组和动板组。如果芯棒4安装在静板组(图15-图17),随着模具的开模,由于套环部分1通过凹凸槽15卡合在动板组的套环部分内芯22上,所以套环部分1会通过连接带11拉拽模具静型腔板3上包裹着芯棒4的环形开口14,由于环形开口14的壁厚设计,使得环形开口14在连接带11的拉拽下可以绕芯棒4旋转也可以与芯棒4一起旋转(图16),旋转后的环形开口14外围会与模具静型腔板3形成一定间隙(图16中的h3),并且接连带11对环形开口14的拉力方向也更接近开模方向,随着开模距离增大,环形开口14会被连接带11直接拉拽出芯棒4,芯棒4拔出时环形开口14与模具静型腔板3之间的间隙(图16中的h3)能容纳一部分的外围撑开变形量,直到开模结束后顶杆9顶动套环部分1脱离套环内芯22使提手整体脱离(图17)完成一个完整的脱模程序。如果芯棒是安装在动板组的(图18-图19)则需要运行多级顶出程序,开模完成后运行一级顶出程序顶杆9直接顶连接带11,由于环形开口14的壁厚设计,连接带11被顶杆9顶出的同时会拉拽环形开口14绕芯棒4旋转也可以与芯棒4一起旋转(图18),旋转后的环形开口14外围会与动型腔板形成一定间隙(图18中的h4),并且接连带11对环形开口14的拉力方向也更接近顶出方向,随着对连接带11顶出距离增大,环形开口14被连接带11拉拽并直接从芯棒4拔出,芯棒4拔出时环形开口14与模具静型腔板3之间的间隙(图18中的h4)能容纳一部分的外围撑开变形量,接下来运行二级顶出程序,顶杆9顶动套环部分1脱离套环内芯22使提手整体脱离(图19)。以上这种脱模方式的模具结构更加简单,只是环形开口14厚度分布和外围形状会有所限制,如果环形开口14的开口部位厚度(图15中的h1)和中段部分厚度(图15中的h2)落差不是很大的情况下,环形开口14的旋转带来的和模具静型腔板3或者模具动型腔板2之间的间隙(图16中的h3,图18中的h4)不足于容纳环形开口14脱离芯棒4时的直径膨胀,所以环形开口14只能是改变拔出角度后硬扯出芯棒4和的模具静型腔板3或者模具动型腔板2之间的间隙的,这种脱模方式环形开口14容易变形,针对变形度要求不高的可以使用。
51.第四种方式(图20-24):芯棒4通过定位机构41安装于模具动板组(图20,图22),使其能相对于模具动型腔板2之间做零到一定间距的直线(图22)或者曲线(图20)运动,芯棒4也能通过定位机构41自旋转,模具在合模状态下芯棒4会被模具静型腔板3和模具动型腔板2压住,此时芯棒4和模具动型腔板2的间距2为零,芯棒4与模具静型腔板3和模具动型腔板2之间形成环形开口14的注胶空间,提手注塑成型完成后模具开始开模,芯棒4与模具动板组之间可以通过安装弹簧5用来推动芯棒4(图20),或者使用驱动机构42驱动芯棒4(图22),其目的是使芯棒4在开模的同时带着环形开口14更快的离开模具动型腔板2并形成预定的间距(图20,图22中的h),此距离使芯棒4主动移出环形开口14时不与模具型腔板产生干涉,并
且也给芯棒4主动脱离环形开口14时导致的环形开口14外围直径增大提供了空间,此时的套环部分1依旧通过凹凸槽15被卡合在套环内芯22上(图20,图22),随着开模的继续,芯棒在定位机构41的继续驱动下(图21),或者在驱动机构42的驱动下(图23)脱离环形开口14,直到开模结束顶杆9顶动套环部分1脱离套环内芯22完成一个完整脱模方式(图24)。以上结构也可以通过定位机构41将芯棒4安装在模具静板组,后续脱模方式都只是反个方向,这里就不再做叙述。此种脱模方式结构有点复杂,但脱出的提手产品变形最少。
52.以上的几种脱模方式其核心点就是通过各种不同的方法使开模后的芯棒4带动环形开口14与模具静型腔板3或者模具动型腔板2之间形成一定的间距h,有这个间距h就能容纳环形开口14脱离芯棒4时外围的膨胀,也使芯棒4脱离环形开口14时不与模具型腔板产生干涉,另外使用各种方法改变环形开口14脱离芯棒4时的方向使之更接近与开模方向或者脱模正方向,如果不改变其脱离方向,那环形开口14脱离芯棒4的方向是和型腔板相互干涉的,另外都是靠套环内芯体22通过凹凸槽15卡合住提手套环部分1,其目的是使环形开口脱离芯棒时能被套环内芯卡合住的套环部分通过连接带拉拽住。以上第一种,第二种和第三种脱模方式如果设置芯棒4不能自由转动,假设芯棒4是纯圆的,那环形开口14会绕芯棒4旋转,如果芯棒4不是纯圆的,那环形开口14会强制绕芯棒4旋转而会导致一点小变形,对变形度要求不高的也可以采用。
53.以上提及的第一种脱模方式的模具相对全部是正脱模斜度的提手模具在体积、生产速度、生产成本上几乎无变化,所以本实用新型人认为这个方式是最合理的方式并具备产品大规模推广的条件。第二种脱模方式的模具相对全部是正脱模斜度的提手模具在生产速度上基本没什么变化,但由于多级顶出导致顶杆加长而使模具高度增大,模具复杂度增加。而第三种脱模方式的模具相对全部是正脱模斜度的提手模具在体积、生产速度、生产成本上也是没变化的,只是环形开口14容易变形,对变形要求不高的可以采用。第四种的脱模方式的模具相对全部是正脱模斜度的提手模具在体积上有所增大、模具也相对复杂,但脱出的提手产品变形最小。
54.最后应当说明的是:以上实施例仅用以说明本实用新型的技术方案而非对其限制,尽管参照上述实施例对本实用新型进行了详细的说明,所属领域的普通技术人员依然可以对本实用新型的具体实施方式进行修改或者等同替换,这些未脱离本实用新型精神和范围的任何修改或者等同替换,均在申请待批的权利要求保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1