浸润压合装置的制作方法
1.本发明涉及纤维树脂基复合材料技术领域,特别涉及一种浸润压合装置。
背景技术:
2.浸润压合装置是用于精密控制两个辊筒间距或压力的高精度装置,控制精度高于0.01mm,既要实现间隙模式控制,也要实现压力模式控制。为了实现间隙控制和压力控制,现有的浸润压合装置,均是采用一端加压(液压或气压或伺服电机),另外一端靠支撑控制两辊的间隙,使得现有的浸润压合装置在压力状态下(特别是高压力下),间隙支撑的调节会发生弹性变形,间隙重复精度偏差太大,导致间隙控制的精度较低。
技术实现要素:
3.本发明实施例提供一种浸润压合装置,能够有效提高间隙控制精度,提高加工物料的成品率。
4.本发明实施例提供一种浸润压合装置,包括第一伺服油缸组件、第二伺服油缸组件、刚性连接件、上辊、导轨和下辊,所述第一伺服油缸组件和所述第二伺服油缸组件均通过所述刚性连接件与所述上辊连接,用于控制所述上辊沿所述导轨上下移动;所述下辊设置在所述上辊的正下方,所述第一伺服油缸组件和所述第二伺服油缸组件设置在所述上辊的两侧。
5.可选的,所述上辊沿第一方向进行旋转,所述下辊沿第二方向进行旋转,其中,所述第二方向为所述第一方向的反方向。
6.可选的,所述导轨为直线导轨,所述导轨设置在所述上辊的两侧。
7.可选的,所述第一伺服油缸组件包括第一位移传感器、第一压力传感器、第一伺服阀和第一运动控制器,所述第一位移传感器用于获取所述上辊的位移数据,所述第一压力传感器用于获取所述上辊的压力数据,所述第一伺服阀用于将第一设定压力输出,所述第一运动控制器用于控制所述上辊的移动距离。
8.可选的,所述第二伺服油缸组件包括第二位移传感器、第二压力传感器、第二伺服阀和第二运动控制器,所述第二位移传感器用于获取所述上辊的位移数据,所述第二压力传感器用于获取所述上辊的压力数据,所述第二伺服阀用于将第二设定压力输出,所述第二运动控制器用于控制所述上辊的移动距离。
9.可选的,所述下辊设置在固定框架上。
10.可选的,所述第一伺服油缸组件包括设置在所述上辊上方的第一油缸。
11.可选的,所述第一油缸的每个腔中均设置有所述第一压力传感器。
12.可选的,所述第二伺服油缸组件包括设置在所述上辊上方的第二油缸。
13.可选的,所述第二油缸的每个腔中均设置有所述第二压力传感器。
14.本发明实施例中的上述一个或至少一个技术方案,至少具有如下技术效果:
15.基于上述技术方案,浸润压合装置包括第一伺服油缸组件、第二伺服油缸组件、刚
性连接件、上辊、导轨和下辊,所述第一伺服油缸组件和所述第二伺服油缸组件均通过所述刚性连接件与所述上辊连接,用于控制所述上辊沿所述导轨上下移动;所述下辊设置在所述上辊的正下方,所述第一伺服油缸组件和所述第二伺服油缸组件设置在所述上辊的两侧,如此,通过第一伺服油缸组件和第二伺服油缸组件来控制上辊沿导轨上下移动,使得第一伺服油缸组件和第二伺服油缸组件均是单独控制,且第一伺服油缸组件和第二伺服油缸组件设置在上辊的两侧,可以有效的对抗如偏载等带来的外界扰动,从而能够有效提高间隙控制的精度,提高加工物料的成品率。
16.另外,由于第一伺服油缸组件和第二油缸组件均包含位移传感器、压力传感器、伺服阀和动控制器,而位移传感器用于获取上辊的位移数据,压力传感器用于获取上辊的压力数据,再通过伺服阀用于将设定压力输出,运动控制器用于控制上辊的移动距离;如此,使得第一服油缸组件和第二油缸组件同步采用压力控制方式来控制上辊进行移动,能够有效提高压力控制的精度,进而提高加工物料的成品率。
附图说明
17.图1为本发明实施例提供的浸润压合装置的侧视图;
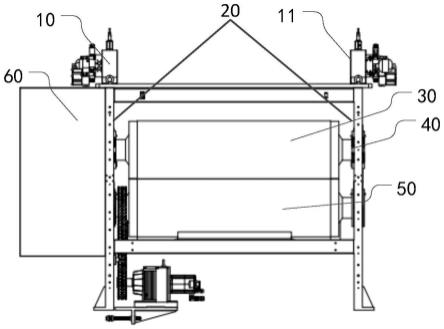
18.图2为本发明实施例提供的浸润压合装置的整体结构图;
19.图3为本发明实施例提供的第一伺服油缸组件的结构示意图。
具体实施方式
20.下面结合附图对本发明实施例技术方案的主要实现原理、具体实施方式及其对应能够达到的有益效果进行详细的阐述。
21.实施例
22.请参考图1和图2,本发明实施例提供一种浸润压合装置,包括第一伺服油缸组件10、第二伺服油缸组件11、刚性连接件20、上辊30、导轨40和下辊50,第一伺服油缸组件10和第二伺服油缸组件11均通过刚性连接件20与上辊30连接,用于控制上辊30沿导轨40上下移动;下辊50设置在上辊30的正下方,第一伺服油缸组件10和第二伺服油缸组件11设置在上辊30的两侧。
23.本说明书实施例中,第一伺服油缸组件10、第二伺服油缸组件11、刚性连接件20、上辊30、导轨40和下辊50均设置在固定架60上。
24.如图2所示,刚性连接件20包括第一刚性连接件和第二刚性连接件201,其中,第一伺服油缸组件10通过第一刚性连接件与上辊30的前端连接,第二伺服油缸组件11通过第二刚性连接件201与上辊30的后端连接,通过第一伺服油缸组件10和第二伺服油缸组件11可以控制上辊30沿导轨40上下移动,且还能控制上辊30的倾斜度,通常控制上辊30的倾斜度为0此时上辊30与水平面平行。
25.本说明书实施例中,上辊30沿第一方向进行旋转,下辊50沿第二方向进行旋转,其中,第二方向为第一方向的反方向。其中,第一方向可以是顺时针方向或逆时针方向,在第一方向为顺时针方向时,第二方向为逆时针方向;在第一方向为逆时针方向时,第二方向为顺时针方向。
26.具体来讲,在通过第一伺服油缸组件10和第二伺服油缸组件11控制上辊30上下移
动的过程中,上辊30同时沿第一方向进行旋转。
27.具体地,为了精确控制上辊30进行上下移动,导轨40可以设置为直线导轨,导轨40可以设置在上辊30的两侧,以降低上辊30从导轨40中脱离的概率。
28.本说明书实施例中,参见图3,第一伺服油缸组件10包括第一位移传感器、第一压力传感器、第一伺服阀和第一运动控制器,第一位移传感器用于获取上辊30的位移数据,第一压力传感器用于获取上辊30的压力数据,第一伺服阀用于将第一设定压力输出,第一运动控制器用于控制上辊30的移动距离。
29.相应的,第二伺服油缸组件11包括第二位移传感器、第二压力传感器、第二伺服阀和第二运动控制器,第二位移传感器用于获取上辊30的位移数据,第二压力传感器用于获取上辊30的压力数据,第二伺服阀用于将第二设定压力输出,第二运动控制器用于控制上辊30的移动距离。
30.在实际应用过程中,以第一伺服油缸组件10为例,在通过第一位移传感器获取到上辊30的位移数据,以及获取预先设定的上辊30和下辊50之间的预设间隙之后,再根据预设间隙和位移数据,确定上辊30的目标移动位置,通过第一运动控制器控制上辊30进行移动,并控制上辊30移动至目标移动位置,此时,可以通过第一伺服油缸组件10采用间隙控制方式来控制上辊30进行移动;相应地,第二伺服油缸组件11同样采用上述方式来同步控制上辊30移动至目标移动位置,由于第一伺服油缸组件10和第二伺服油缸组件11设置在上辊30的两侧,以降低由于第一伺服油缸组件10或第二伺服油缸组件11单独控制上辊30移动导致上辊30出现偏转而不能准确移动至目标移动位置的概率,从而能够有效提高间隙控制的精度,提高加工物料的成品率。
31.以及,在通过第一压力传感器获取到上辊30的压力数据,以及获取预先设定的待施加压力之后,根据压力数据和待施加压力,确定待调整压力;通过第一伺服阀来输出待调整压力至上辊30,以使得施加至上辊30的实际压力为待施加压力,此时,可以通过第一伺服油缸组件10采用压力控制方式来控制上辊30进行移动;相应地,第二伺服油缸组件11同样采用上述方式来同步给上辊30施加压力,由于第一伺服油缸组件10和第二伺服油缸组件11设置在上辊30的两侧,以降低由于第一伺服油缸组件10或第二伺服油缸组件11单独控制上辊30移动导致上辊30出现偏转而不能准确移动至目标移动位置的概率,从而能够有效提高压力控制的精度,提高加工物料的成品率。
32.在另一实施例中,为了进一步实现对上辊30的精确控制,浸润压合装置可以设置n个伺服油缸组件,其中,n为不小于3的整数。以及,在设置n个伺服油缸组件时,n个伺服油缸组件可以均匀分布在上辊30的外侧。
33.由于第一伺服油缸组件10和第二伺服油缸组件11均是独立设置的,使得第一伺服油缸组件10和第二伺服油缸组件11均可以自行控制,而且第一伺服油缸组件10和第二伺服油缸组件11均包含运动控制器、伺服阀和位移传感器,使得第一伺服油缸组件10和第二伺服油缸组件11的响应速度较高,从而能够有效对抗如偏载等带来的外界扰动,从而能够有效提高间隙控制的精度,提高加工物料的成品率。
34.另外,第一伺服油缸组件10和第二伺服油缸组件11中每个油缸组件的两个伺服轴可以任意的耦合跟随,从而可以相互比较来确定每个轴之间的同步度,从而可以对上辊30和下辊50之间的间隙进行精确控制。
35.本说明书实施例中,下辊50设置在固定框架上,且下辊50还沿第二方向进行旋转。
36.本说明书实施例中,如图3所示,第一伺服油缸组件10包括设置在上辊30上方的第一油缸100,第一油缸100分为上腔101和下腔102,上腔101和下腔102中均设置有第一压力传感器,用于实时获取第一油缸100中的压力。当然,第一油缸100还可以分为3个或3个以上的腔,本说明书不作具体限制。
37.本说明书实施例中,第二伺服油缸组件11包括设置在上辊30上方的第二油缸,在第二油缸的每个腔中设置有第二压力传感器,用于实时获取第二油缸中的压力,第二伺服油缸组件11的具体结构参考第一伺服油缸组件10的结构。
38.本发明实施例中的上述一个或至少一个技术方案,至少具有如下技术效果:
39.基于上述技术方案,浸润压合装置包括第一伺服油缸组件、第二伺服油缸组件、刚性连接件、上辊、导轨和下辊,所述第一伺服油缸组件和所述第二伺服油缸组件均通过所述刚性连接件与所述上辊连接,用于控制所述上辊沿所述导轨上下移动;所述下辊设置在所述上辊的正下方,所述第一伺服油缸组件和所述第二伺服油缸组件设置在所述上辊的两侧,如此,通过第一伺服油缸组件和第二伺服油缸组件来控制上辊沿导轨上下移动,使得第一伺服油缸组件和第二伺服油缸组件均是单独控制,且第一伺服油缸组件和第二伺服油缸组件设置在上辊的两侧,可以有效的对抗如偏载等带来的外界扰动,从而能够有效提高间隙控制的精度,提高加工物料的成品率。
40.另外,由于第一伺服油缸组件和第二油缸组件均包含位移传感器、压力传感器、伺服阀和动控制器,而位移传感器用于获取上辊的位移数据,压力传感器用于获取上辊的压力数据,再通过伺服阀用于将设定压力输出,运动控制器用于控制上辊的移动距离;如此,使得第一服油缸组件和第二油缸组件同步采用压力控制方式来控制上辊进行移动,能够有效提高压力控制的精度,进而提高加工物料的成品率。
41.本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本发明旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本公开未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
42.应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制
43.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1