一种基于应力的3D打印连续性路径规划方法
本发明涉及3d打印领域,具体说是一种基于应力的连续性路径规划方法。
背景技术:
1、3d打印又称增材制造(additive manufacturing,am)是一种使用可粘合材料逐层叠加地制造物体的技术。近年来已广泛应用于机械设计、生物医学工程、放生结构、教育行业等领域。增材制造工艺生成的产品质量受层厚、成型温度、印刷材料、印刷速率和路径规划等参数的影响。其中,路径规划对加工效率、表面光洁度、结构刚度和各向异性等有着重要的影响。
2、到目前位置,已经提出了大量的路径规划算法。其中一些已经集成到商业软件中,如zigzag、hilbert、contour和fermat。目前,contour算法与zigzag算法的结合受到了广泛的关注,因为它既继承了contour算法的表面精度,又继承了zigzag算法的简洁性。然而,上述算法只关注几何精度和打印效率,并未考虑到被制造物体的机械性能。当物体受到外力作用时,路径的各向异性会对其力学性能产生一定的影响。有实验证明,当路径方向与主应力方向平行时,物体的抗拉强度和抗压强度可分别提高176%和21%。因此,在路径规划中考虑路径的各向异性是必要和重要的。
3、针对上述情况,本发明提出了一种具有全局连续性的3d打印应力路径规划方法,该方法可以在保证打印速度和表面精度的同时提升的成型件的力学性能。
技术实现思路
1、本发明主要目的在于提供一种基于应力的3d打印连续性路径规划方法,以解决背景技术中路径的各向异性对成型件影响的问题。
2、本发明采用的技术方案主要包括以下步骤:
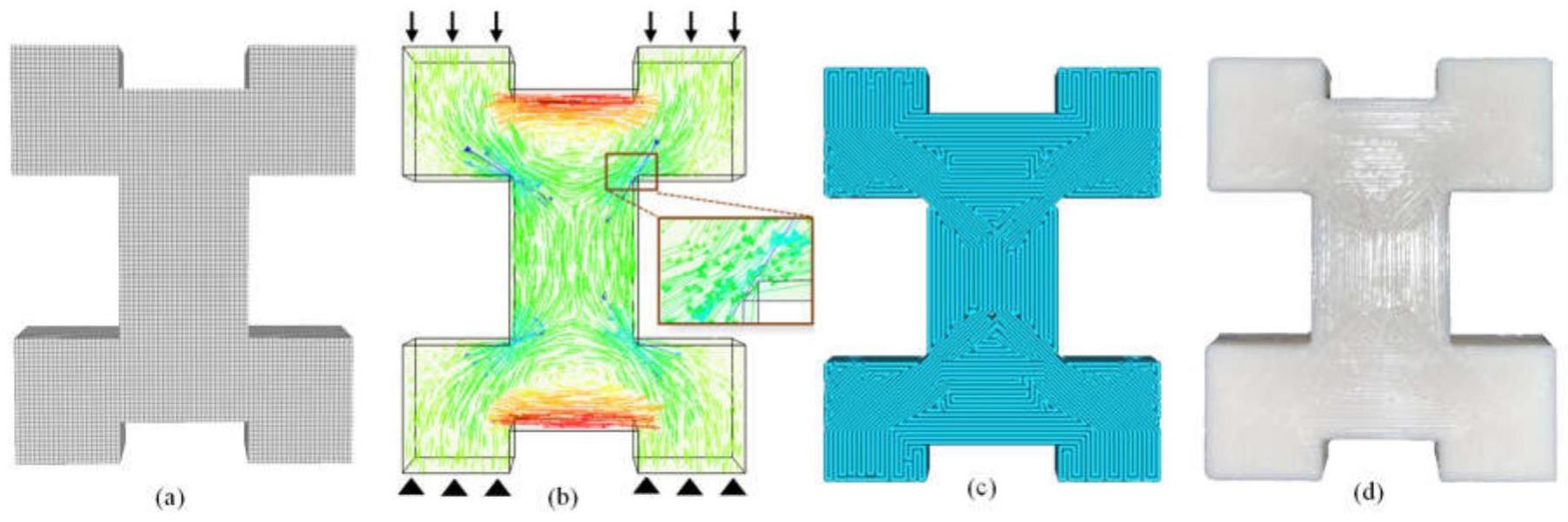
3、步骤1根据预打印路径宽度和层厚对模型进行离散化;
4、为了生成具有自定义的离散单元。首先根据模型的尺寸来生成一个包围盒,再将包围盒离散成数多个六面体单元。其中,单元的长宽为预定路径宽度的二倍(2d),高为层厚(h)。其次,对模型进切片来获得模型在每层切面中的轮廓。最后,在每层切面内,利用引射线法来获得在该轮廓内的六面体单元中心坐标。
5、步骤2应力的平滑性优化;
6、将步骤1获得的由众多六面体单元构成的模型导入到有限元分析软件中,对导入的模型施加载荷和边界条件,用于获得每个六面体单元的应力数据。由于应力的正负代表着方向,因此,当应力趋近于零时,这一部分的单元的应力方向是复杂多变的。接下来设置一个阈值η来获取该部分的单元,对该部分单元的应力方向删除,并将周边邻接单元的应力方向赋值给这些单元来保证应力的平滑性。
7、步骤3连续性应力路径;
8、利用应力来生成应力线,该应力线由众多的离散单元坐标组成。通过应力线向两侧偏置来生成具有闭合回路的路径。偏置距离根据应力线的方向有所不同,当应力线水平或垂直时偏置距离为(d/2),当应力线倾斜时偏置距离为(√2d/4)。最后,利用深度优先遍历算法来对每条相邻的路径形成连接,并合并为一条路径。
9、步骤4不同路径宽度的成型技术;
10、当路径方向为±45°时,如果该路径宽度为(d),这将会形成过度填充,影响成型件的表面精度。因此,通过调整挤出率来优化该方向的路径。
11、本发明的有益效果如下:
12、在平面内本发明采用四边形离散化,该方法可以有效的改善现有应力路径的应力集中区域。另外,引入了全局连续性算法,从某一层看,该算法可以一笔走完所有路径,没有喷头的跳转和空行程,大幅度的提升了打印效率。同时,由于没有空行程所造成的拉丝现象,提高了模型的表面精度。
技术特征:
1.一种应力线生成方法,其特征在于:(1)在模型离散化时,六面体离散单元的边长可根据所需打印路径宽度和层厚进行改变;(2)可根据有限元分析得到的应力数据进行优化,当某个离散单元的应力值很小时,对其进行应力方向平滑处理;(3)可根据优化后的应力方向生成具有较少断点的应力线。
2.一种具有连续性的路径生成方法,其特征在于:(1)可以将应力线生成具有闭合回路的路径;(2)可以根据不同路径之间的邻接关系合并路径,生成具有全局连续的应力路径;(3)可以动态控制打印机的挤出率来满足路径在不同方向下的线宽,从而满足具体的打印需求。
3.根据权利要求1所述的一种生成应力线的方法,在采用六面体来离散模型时其特征在于:六面体的长和宽为预打印路径的二倍,高为预打印的层厚;在断点优化时其特征在于:对个离散单元赋予度数,其中,端点为1,中间单元为2,未纳入应力线的单元为0,最后根据度数使两条应力线合并。
4.根据权利要求2所述的一种连续性路径生成方法,在生成具有闭合回路的路径时其特征在于:在竖直水平方向偏置距离为路径宽度的一半,在倾斜方向偏置距离为路径宽度的√2/4倍;在合并路径时其特征在于:根据每条路径的邻接关系生成邻接矩阵,引入深度优先遍历算法使两两路径之间生成连接关系,最终合并路径。
技术总结
本申请的目的是提供一种基于应力的3D打印连续性路径规划方法,本申请通过获取待打印模型,基于所述待打印模型离散成六面体网格,其网格的边长为打印路径宽度的二倍,高度为预打印的层厚,利用有限元分析得到主应力场。由于路径是在二维四边形网格上生成的,因此主应力方向场被投影到二维域上。针对应力值接近于零的单元的应力方向是任意的,提出了一种均匀主应力方向场的方法,从主应力方向场中提取应力线,采用多种连接规则,消除孤立点,并进行连续性优化。最后,对每条应力线进行偏置生成具有闭环的路径,并将不同路径进行连接,生成全局连续的路径。此外,根据路径方向自适应调整挤出速率,以缓解网格离散化引起的过度填充问题。通过该方法打印的模型在表面质量与曲面精度都保证的前提下具有较强的力学性能。
技术研发人员:徐文鹏,徐豪,王伟明
受保护的技术使用者:河南理工大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!