一种用于注塑汽车前端模块载架的机械手的制作方法
1.本实用新型涉及汽车配件制造技术领域,尤其涉及一种用于注塑汽车前端模块载架的机械手。
背景技术:
2.随着全球汽车制造技术向模块化、集成化方向发展,对汽车模块化的一个主要趋势是汽车的前端的模块化。车辆的前端模块是集成有发动机罩挂钩、发动机罩锁、两侧前大灯及冷却模块散热器等的一个单元,而前端模块载架是组装前端零部件的框架结构,组装后的整体形成前端模块。
3.为了实现汽车的轻量化,前端模块载架一般是采用钣金件和塑料进行一体注塑成型,为了方便前端模块载架与其它零部件连接,一般采用若干金属垫圈注塑入前端模块载架中,使前端模块载架上形成若干耐磨的金属通孔用于连接。在前端模块载架的注塑过程中,需要先将钣金件和若干垫圈准确的安装在注塑模具中对应的位置上,然后进行注塑。
4.如果采用人工操作的话,钣金件和若干垫圈的安装效率较低,且安装精度得不到把控;而且,在注塑完成后,前端模块载架虽以定型,但仍具有较高的温度,无法人工及时将前端模块载架从模具中取出;前端模块载架开模时散发出来的塑料气味对人体也有较大的危害;因此,急需提供一种能够将钣金件和若干垫圈快速准确的安装在注塑模具中,并在开模后,能够及时将前端模块载架取出的机械手。
技术实现要素:
5.有鉴于此,本实用新型提出了一种用于注塑汽车前端模块载架的机械手,解决了在前端模块载架注塑时,人工在注塑模具上安装钣金件和垫圈,效率低和准确度差的问题。
6.本实用新型的技术方案是这样实现的:本实用新型提供了一种用于注塑汽车前端模块载架的机械手,其包括架体,架体具有若干平面,架体的第一平面与机器人手臂固定连接,还包括钣金件拾取装置和若干垫圈取卸装置,其中,
7.钣金件拾取装置竖直固定设置于架体的第二平面上,钣金件拾取装置远离架体的一端选择性沿钣金件拾取装置的轴向延伸方向移动;
8.若干垫圈取卸装置均间隔设置架体的第二平面上,垫圈取卸装置包括取料筒和卸料机构;
9.取料筒竖直固定设置于架体第二平面上,卸料机构滑动设置于取料筒内,卸料机构选择性沿取料筒的轴向延伸方向移动。
10.在以上技术方案的基础上,优选的,所述垫圈取卸装置还包括若干卡取机构,若干卡取机构围绕取料筒的中心线环形阵列设置于取料筒远离架体的一端筒壁上;卡取机构的一端选择性穿过取料筒的筒壁,位于取料筒的内部,并与垫圈的外圈过盈接触。
11.在以上技术方案的基础上,优选的,所述垫圈取卸装置还包括第一支架和第一直线驱动单元,其中,
12.第一支架竖直固定设置于架体的第二平面上,取料筒固定设置于第一支架远离架体的一端;
13.第一直线驱动单元固定设置于第一支架上,第一直线驱动单元轴向方向与卸料机构的轴向方向重合,第一直线驱动单元的输出端与卸料机构接近第一支架的一端固定连接。
14.在以上技术方案的基础上,优选的,所述卸料机构包括卸料柱,卸料柱滑动设置于取料筒中,卸料柱接近架体的一端与第一直线驱动单元的输出端固定连接;卸料柱远离架体的一端选择性与垫圈的端面接触。
15.在以上技术方案的基础上,优选的,所述卸料机构还包括负压发生单元,所述卸料柱远离架体的端面上围绕卸料柱的中心线环形阵列竖直设置有若干气孔;气孔远离架体的一端选择性与垫圈的端面接触,气孔接近架体的一端与负压发生单元连通。
16.在以上技术方案的基础上,优选的,所述卸料机构还包括两个气密圈和管接头,其中,
17.两个气密圈间隔设置,且均滑动套设与卸料柱上,取料筒中部的内径大于卸料柱的直径,两个气密圈均与取料筒中部的内壁固定连接;
18.卸料柱的外壁上设置有环形槽,环形槽位于取料筒内部,并位于两个气密圈之间,若干气孔均与环形槽连通;
19.管接头固定设置于取料筒的外壁上,管接头的一端与负压发生单元连通,管接头另一端穿过取料筒的筒壁与环形槽连通。
20.在以上技术方案的基础上,优选的,所述卡取机构包括固定件、浮动件和弹性件,其中,
21.固定件固定设置于取料筒的筒壁上,固定件接近取料筒中心线的端面上设置有盲孔,盲孔与取料筒的内部连通;
22.浮动件和弹性件均设置于盲孔中,弹性件的两端分别与浮动件和盲孔的孔底固定连接;
23.浮动件与盲孔的孔壁滑动连接,浮动件的部分位于取料筒的内部。
24.在以上技术方案的基础上,优选的,所述钣金件拾取装置包括第二支架、拾取机构、第二直线驱动单元和若干导柱,其中,
25.第二支架竖直固定设置于架体第二平面上,拾取机构平行设置于第二支架远离架体的一侧;
26.第二直线驱动单元竖直固定设置于第二支架上,第二直线驱动单元的输出端朝向拾取机构,并拾取机构竖直固定连接;
27.若干导柱间隔竖直设置于第二支架上,并与第二支架滑动连接,导柱远离架体的一端与拾取机构竖直固定连接。
28.在以上技术方案的基础上,优选的,所述拾取机构包括安装板、若干定位柱和若干第一吸盘,其中,
29.安装板位于第二支架远离架体的一侧,并与架体第二平面平行,第二直线驱动单元的输出端和若干导柱均与安装板竖直固定连接;
30.若干定位柱和若干第一吸盘均间隔竖直固定设置安装板远离架体的板面上。
31.在以上技术方案的基础上,优选的,还包括若干第二吸盘和若干载架定位装置,若干第二吸盘和若干载架定位装置均间隔竖直固定设置于架体第三平面上。
32.本实用新型的一种用于注塑汽车前端模块载架的机械手相对于现有技术具有以下有益效果:
33.(1)通过设置钣金件拾取装置和若干垫圈取卸装置,钣金件拾取装置竖直固定设置于架体的第二平面上,钣金件拾取装置远离架体的一端选择性沿钣金件拾取装置的轴向延伸方向移动;若干垫圈取卸装置均间隔设置架体的第二平面上,垫圈取卸装置包括取料筒和卸料机构;取料筒竖直固定设置于架体第二平面上,卸料机构滑动设置于取料筒内,卸料机构选择性沿取料筒的轴向延伸方向移动;本实用新型提高将钣金件和垫圈安放至注塑模具中的效率,以及安放位置的准确度,全程无需人工与注塑模具接触,减少了在前端模块载架注塑时对人体健康的影响。
34.(2)设置的卡取机构,弹性件可以采用压簧,浮动件可为球体,当垫圈进入取料筒时,浮动件可将垫圈卡在取料筒中,使架体在运动时垫圈不会从取料筒中脱离。
35.(3)设置的卸料机构,待取料筒远离架体的一端位于注塑模具上放置垫圈对应的位置时,通过第一直线驱动单元推动卸料柱,将垫圈从取料筒中推出;为了防止垫圈直接从取料筒蹦出,可通过负压发生单元将垫圈吸附在卸料柱远离架体的端面上,直到垫圈与注塑模具接触后停止负压发生单元的工作,使得能够平稳快速准确的将垫圈放置于注塑模具上。
附图说明
36.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
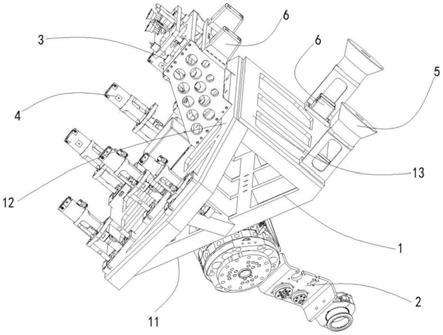
37.图1为本实用新型的一种用于注塑汽车前端模块载架的机械手的结构示意图;
38.图2为本实用新型的一种用于注塑汽车前端模块载架的机械手的轴测图;
39.图3为本实用新型的一种用于注塑汽车前端模块载架的机械手中钣金件拾取装置的结构示意图;
40.图4为本实用新型的一种用于注塑汽车前端模块载架的机械手中垫圈取卸装置的结构示意图;
41.图5为本实用新型的一种用于注塑汽车前端模块载架的机械手中卸料机构的结构示意图;
42.图6为本实用新型的一种用于注塑汽车前端模块载架的机械手中卡取机构的爆炸图;
43.图7为本实用新型的一种用于注塑汽车前端模块载架的机械手中垫圈的结构示意图;
44.图8为本实用新型的一种用于注塑汽车前端模块载架的机械手的工作示意图。
45.图中:1、架体,11、第一平面,12、第二平面,13、第三平面,2、机器人手臂,3、钣金件拾取装置,31、第二支架,32、拾取机构,321、安装板,322、定位柱,323、第一吸盘,33、第二直
线驱动单元,34、导柱,4、垫圈取卸装置,41、取料筒,42、卸料机构,421、卸料柱,4211、气孔,4212、环形槽,422、气密圈,423、管接头,43、卡取机构,431、固定件,432、浮动件,433、弹性件,44、第一支架,45、第一直线驱动单元,5、第二吸盘,6、载架定位装置。
具体实施方式
46.下面将结合本实用新型实施方式,对本实用新型实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式仅仅是本实用新型一部分实施方式,而不是全部的实施方式。基于本实用新型中的实施方式,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施方式,都属于本实用新型保护的范围。
47.如图1-8所示,本实用新型的一种用于注塑汽车前端模块载架的机械手,包括架体1、钣金件拾取装置3、若干垫圈取卸装置4、若干第二吸盘5和若干载架定位装置6;架体1具有若干平面,架体1的第一平面与机器人手臂2固定连接;钣金件拾取装置3竖直固定设置于架体1的第二平面12上,钣金件拾取装置3远离架体1的一端选择性沿钣金件拾取装置3的轴向延伸方向移动;若干垫圈取卸装置4均间隔设置架体1的第二平面12上,垫圈取卸装置4包括取料筒41和卸料机构42;取料筒41竖直固定设置于架体1第二平面12上,卸料机构42滑动设置于取料筒41内,卸料机构42选择性沿取料筒41的轴向延伸方向移动;若干第二吸盘5和若干载架定位装置6均间隔竖直固定设置于架体1第三平面13上。
48.本实用新型在使用时,架体1和机器人手臂2可采用现有技术,架体1具有若干平面,第二平面12与第三平面13垂直,第一平面的两端分别连接第二平面12远离第三平面13的一端和第三平面13远离第二平面12的一端,架体1的主要工作面为第二平面12与第三平面13,第一平面仅与机器人手臂2连接,机器人手臂2控制架体1运动;第二平面12上的钣金件拾取装置3可以拾取钣金件,并将钣金件放置于注塑模具上对应的位置;第二平面12上的若干垫圈取卸装置4可以拾取若干垫圈,并将若干垫圈同时放置于注塑模具上对应的位置;待前端模块载架注塑完成后,使架体1的第三平面13朝向注塑模具,第三平面13上的载架定位装置6可以对注塑模具内的前端模块载架起着定位作用,然后通过若干第二吸盘5将前端模块载架从注塑模具中取出。本实用新型提高将钣金件和垫圈安放至注塑模具中的效率,以及安放位置的准确度,同时还能后将注塑完成的前端模块载架从注塑模具中取出,全程无需人工与注塑模具接触,减少了在前端模块载架注塑时对人体健康的影响。
49.在本实用新型的一个具体实施例中,钣金件拾取装置3是将钣金件放置于注塑模具中对应位置的装置,钣金件拾取装置3包括第二支架31、拾取机构32、第二直线驱动单元33和若干导柱34;第二支架31竖直固定设置于架体1第二平面12上,拾取机构32平行设置于第二支架31远离架体1的一侧;第二直线驱动单元33竖直固定设置于第二支架31上,第二直线驱动单元33的输出端朝向拾取机构32,并拾取机构32竖直固定连接;若干导柱34间隔竖直设置于第二支架31上,并与第二支架31滑动连接,导柱34远离架体1的一端与拾取机构32竖直固定连接。
50.优选的,拾取机构32包括安装板321、若干定位柱322和若干第一吸盘323;安装板321位于第二支架31远离架体1的一侧,并与架体1第二平面12平行,第二直线驱动单元33的输出端和若干导柱34均与安装板321竖直固定连接;若干定位柱322和若干第一吸盘323均间隔竖直固定设置安装板321远离架体1的板面上;第二吸盘5和第一吸盘323均可采用真空
吸盘,定位柱322可以插入钣金件上的孔洞中实现定位。
51.在本实用新型的一个具体实施例中,垫圈取卸装置4是将垫圈放置于注塑模具上对应位置的装置,垫圈取卸装置4还包括若干卡取机构43、第一支架44和第一直线驱动单元45;若干卡取机构43围绕取料筒41的中心线环形阵列设置于取料筒41远离架体1的一端筒壁上;卡取机构43的一端选择性穿过取料筒41的筒壁,位于取料筒41的内部,并与垫圈的外圈过盈接触;第一支架44竖直固定设置于架体1的第二平面12上,取料筒41固定设置于第一支架44远离架体1的一端;第一直线驱动单元45固定设置于第一支架44上,第一直线驱动单元45轴向方向与卸料机构42的轴向方向重合,第一直线驱动单元45的输出端与卸料机构42接近第一支架44的一端固定连接。
52.卸料机构42包括卸料柱421和负压发生单元(图中未展示);卸料柱421滑动设置于取料筒41中,卸料柱421接近架体1的一端与第一直线驱动单元45的输出端固定连接;卸料柱421远离架体1的一端选择性与垫圈的端面接触;卸料柱421远离架体1的端面上围绕卸料柱421的中心线环形阵列竖直设置有若干气孔4211;气孔4211远离架体1的一端选择性与垫圈的端面接触,气孔4211接近架体1的一端与负压发生单元连通。优选的,卸料机构42还包括两个气密圈422和管接头423,两个气密圈422间隔设置,且均滑动套设与卸料柱421上,取料筒41中部的内径大于卸料柱421的直径,两个气密圈422均与取料筒41中部的内壁固定连接;卸料柱421的外壁上设置有环形槽4212,环形槽4212位于取料筒41内部,并位于两个气密圈422之间,若干气孔4211均与环形槽4212连通;管接头423固定设置于取料筒41的外壁上,管接头423的一端与负压发生单元连通,管接头423另一端穿过取料筒41的筒壁与环形槽4212连通。
53.卡取机构43包括固定件431、浮动件432和弹性件433;固定件431固定设置于取料筒41的筒壁上,固定件431接近取料筒41中心线的端面上设置有盲孔411,盲孔411与取料筒41的内部连通;浮动件432和弹性件433均设置于盲孔411中,弹性件433的两端分别与浮动件432和盲孔411的孔底固定连接;浮动件432与盲孔411的孔壁滑动连接,浮动件432的部分位于取料筒41的内部。
54.弹性件433可以采用压簧,浮动件432可为球体,当垫圈进入取料筒41时,浮动件432可将垫圈卡在取料筒41中,使架体1在运动时垫圈不会从取料筒41中脱离;此时,垫圈的接近架体1的端面与气孔4211远离架体1的一端接触;待取料筒41远离架体1的一端位于注塑模具上放置垫圈对应的位置时,通过第一直线驱动单元45推动卸料柱421,将垫圈从取料筒41中推出;为了防止垫圈直接从取料筒41蹦出,可通过负压发生单元将垫圈吸附在卸料柱421远离架体1的端面上,直到垫圈与注塑模具接触后停止负压发生单元的工作,至此,垫圈被平稳快速准确的放置于注塑模具上。
55.以上所述仅为本实用新型的较佳实施方式而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1