驱控一体机的制作方法
1.本技术涉及注塑机技术领域,特别涉及一种驱控一体机。
背景技术:
2.现有技术中,驱控一体机的控制板上的伺服电机功率端子接入伺服电机,由于伺服电机功率端子排布不合理,且伺服电机带入的负载是感性负载,接入的伺服电机之间的干扰很大,使得驱控一体机不能准确的控制机械手位置,易产生警报,已经影响到了驱控一体机的正常工作。
技术实现要素:
3.有鉴于此,本技术提供了一种驱控一体机,用于解决现有技术中驱控一体机不能准确的控制机械手位置,易产生警报,已经影响到了驱控一体机的正常工作的问题。
4.为达上述之一或部分或全部目的或是其他目的,本技术提出一种驱控一体机,包括:
5.底壳;
6.设置于所述底壳上方的上盖;
7.设置于所述底壳和上盖之间的功率板;
8.设置于所述功率板和所述上盖之间的控制板;
9.其中,所述功率板上设置有若干相同的伺服电子输入端子,用于接入伺服电机模块;所述伺服电子输入端子分别设置在所述功率板两侧,且各侧所述伺服电子输入端子等间隔设置。
10.在本实施例所述的驱控一体机中,所述功率板两侧的所述伺服电子输入端子对应设置,且两侧的所述伺服电子输入端子之间的等间隔设置。
11.在本实施例所述的驱控一体机中,所述功率板的第一侧设置三个所述伺服电子输入端子,所述功率板的第二侧设置有两个所述伺服电子输入端子和一个总电源输入端口;所述第一侧的三个所述伺服电子输入端子和所述功率板的第二侧设置的两个所述伺服电子输入端子和一个总电源输入端口一一对应设置。
12.在本实施例所述的驱控一体机中,所述功率板设置有用于避位的避位缺口,所述总电源输入端口设置在靠近所述避位缺口的位置。
13.在本实施例所述的驱控一体机中,所述功率板为一体结构。
14.在本实施例所述的驱控一体机中,各个所述伺服电子输入端子均单独接地。
15.在本实施例所述的驱控一体机中,驱控一体机包括散热器,所述各个所述伺服电子输入端子通过所述散热器接地。
16.在本实施例所述的驱控一体机中,所述功率板上还设置有若干控制芯片,一个所述芯片控制1-3个所述伺服电子输入端子。
17.在本实施例所述的驱控一体机中,所述功率板上还设置有两个控制芯片,一个所
述控制芯片控制三个所述伺服电子输入端子,另一个所述控制芯片控制两个所述伺服电子输入端子。
18.在本实施例所述的驱控一体机中,所述上盖和所述控制板通过螺栓螺母配合固定;
19.所述螺母靠近所述上盖的一端面设置有止挡部,所述止挡部设置于所述控制固定孔内,用于将螺栓与所述控制板隔离开。
20.相比现有技术,本技术的有益效果在于:通过将伺服电机模块接入到在功率板两侧等间隔设置的相同的伺服电子输入端子,排除了伺服电机模块带入的感性负载而产生的相互干扰,使得驱控一体机能够准确的控制机械手的位置,提高工作的效率。同时,也使得驱控一体机的结构更加的紧凑,节约空间,减少成本。
附图说明
21.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
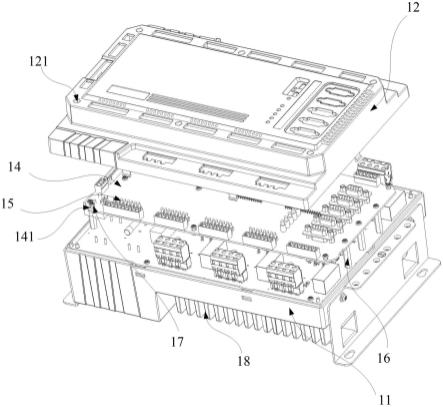
22.图1为一个实施例中的用于驱控一体机的固定模块的结构示意图。
23.图2为图1中用于驱控一体机的固定模块的部分结构示意图。
24.图3为图1中固定件的结构示意图。
25.图4为图1中功率板的结构示意图。
26.其中:
27.11、底壳;
28.12、上盖;121、上盖固定孔;
29.13、功率板;131、伺服电子输入端子;132、总电源输入端口;133、避位缺口;
30.14、控制板;141、控制固定孔;
31.15、插针;
32.16、固定单元;161、第一组固定单元;162、第二组固定单元;163、第三组固定单元;
33.17、固定件;171、螺栓;172、螺母;173、止裆部;1731、导向斜面;
34.18、散热器。
具体实施方式
35.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
36.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
37.请参考图1,本技术一个实施例提供一种驱控一体机,包括:
38.底壳11;
39.设置于底壳11上方的上盖12;
40.设置于底壳11和上盖12之间的功率板13;
41.设置于功率板13和上盖12之间的控制板14;控制板14和功率板13通过插针15电性连接;
42.设置于功率板13和控制板14之间的固定结构,用于固定功率板13和控制板14,固定结构包括若干固定单元;固定单元一端固定设置于控制板14上,另一端固定设置于功率板13上。
43.在本实施例中,通过设置固定结构将控制板14和功率板13固定,当控制板 14或功率板13振动时,由于固定结构的设置,功率板13和固定板在平面上不会出现明显的相对位移,在上下方向上也不会出现相对的跳动,使得保持控制板14 与功率板13电性连接的插针15的稳定,从而提高了控制板14与功率板13电性连接的稳定性。
44.需要说明的是,上下方向指的是垂直与功率板13或者控制板14的方向,平面上的位移指的是沿功率板13或者控制板14所在平面的位移。
45.在一个实施例中,固定单元16为塑胶固定单元,即固定单元16的材质为塑胶材质。在本实施例中,通过固定单元设置为用塑胶材质制成,阻隔或者隔绝了功率板13上大功率的强电的影响,提高了控制板14工作的准确度。
46.请参考图2,在一个实施例中,固定结构16包括第一组固定单元161、第二组固定单元162和第三组固定单元163;
47.第一组固定单元161设置于控制板14的第一端;
48.第二组固定单元162设置于控制板14的第二端;
49.第三组固定单元163设置于第一组固定单元161和第二组固定单元162之间,且第三组固定单元163中固定单元的数量分别少于第一组固定单元161与第二组固定单元162的数量。
50.在本实施例中,通过设置三组固定单元,将控制板14和功率板13固定,由于第三组固定单元163设置于控制板14内部,起到辅助支撑的作用,数量少于第一组和第二组固定单元162,可以节省固定材料,节省成本。
51.请参考图1和图2,在一个实施例中,的用于驱控一体机的固定模块包括用于固定上盖12和控制板14的固定件17。
52.进一步的,上盖12上设置有上盖固定孔121,控制板14上设置有控制固定孔141;固定件17通过上盖固定孔121和控制固定孔141将上盖12与固定板固定。在本实施例中,通过固定件17和上盖12与控制板14上的结构配合,从而将上盖12和固定板固定在一起。
53.请参考图3,在一个实施例中,上盖12和控制板14通过螺栓171螺母172 配合固定。即,固定件17包括螺栓171和螺母172,由于螺栓171螺母172价格便宜,且适用性强,通过螺栓171螺母172配合好的上盖12和控制板14,可以节省成本,且更换维修便利。
54.请参考图3,在一个实施例中,螺母172靠近上盖12的一端面设置有止挡部,止挡部设置于控制固定孔141内,用于将螺栓171与控制板14隔离开。在本实施例中,当转动螺栓171时,将与止裆部173发生相对转动,从而隔绝了螺栓171 直接与控制板14直接接触,减少
了螺栓171内螺纹的磨损,使得螺栓171取出更加的便捷,从而提高了上盖12和控制板14顺利装拆的便捷性。
55.具体的,所述止裆部173一相对两侧为矩形,另一相对两侧为弧形。
56.进一步的,为了提高止裆部173与控制固定孔141安装的便捷性,所述止挡部靠近所述上盖12的一端设有便于安装的导向斜面1731。
57.在另一个实施例中,止挡部外周侧为椭圆形,控制固定孔141内周侧为与止挡部外周侧匹配的椭圆形。
58.在一个实施例中,所述功率板上设置有若干相同的伺服电子输入端子,用于接入伺服电机模块;所述伺服电子输入端子131分别设置在所述功率板两侧,且各侧所述伺服电子输入端子131等间隔设置。
59.在本实施例中,通过将伺服电机模块接入到在功率板两侧等间隔设置的相同的伺服电子输入端子,排除了伺服电机模块带入的感性负载而产生的相互干扰,使得驱控一体机能够准确的控制机械手的位置,提高工作的效率。同时,也使得驱控一体机的结构更加的紧凑,节约空间,减少成本。
60.在一个实施例中,所述功率板两侧的所述伺服电子输入端子131对应设置,且两侧的所述伺服电子输入端子131之间的等间隔设置。
61.具体的,所述功率板的第一侧设置三个所述伺服电子输入端子131,所述功率板的第二侧设置有两个所述伺服电子输入端子131和一个总电源输入端口 132;所述第一侧的三个所述伺服电子输入端子131和所述功率板的第二侧设置的两个所述伺服电子输入端子131和一个总电源输入端口132一一对应设置。
62.更具体的,所述功率板设置有用于避位的避位缺口133,所述总电源输入端口132设置在靠近所述避位缺口133的位置。
63.在本实施例中,通过将两侧的伺服电子输入端子131的间隔设置的相同,使得两侧设置的伺服电机模块之间的距离相同,进一步排除了伺服电机模块带入的感性负载而产生的相互干扰,使得驱控一体机能够准确的控制机械手的位置,提高工作的效率。
64.在一个实施例中,各个所述伺服电子输入端子131均单独接地。具体的,驱控一体机还包括散热器18,所述各个所述伺服电子输入端子131通过所述散热器 18接地。在本实施例中,通过各个点单独接地,防止局部交差干扰,进一步排除了伺服电机模块带入的感性负载而产生的相互干扰,使得驱控一体机能够准确的控制机械手的位置,提高工作的效率。
65.在一个实施例中,所述功率板为一体结构。在本实施例中,由于所述功率板为一体结构,相比拼接的更加的牢靠稳固,抗震性更强,更能承受不稳定因素的干扰,提高了驱控一体机工作的稳定性。
66.在一个实施例中,所述功率板上还设置有若干控制芯片,一个所述芯片控制 1-3个所述伺服电子输入端子131。具体的,所述功率板上还设置有两个控制芯片,一个所述控制芯片控制三个所述伺服电子输入端子131,另一个所述控制芯片控制两个所述伺服电子输入端子131。
67.在本实施例中,一个控制芯片可以控制三个伺服电子输入端子131,使得五个伺服电子输入端子131可以通过两个控制芯片控制,提高了功率板的集成度,缩小了体积,提高了空间的利用率。同时,由于集成度的提高,体积的减小,使得控制芯片和伺服电子输入端
子131可以均可以设置在同一块功率板上,不用将功率板设置成多块,使得功率板更加的牢固,抗震性更强,更能承受不稳定因素的干扰,提高了驱控一体机工作的稳定性。
68.以上所揭露的仅为本技术较佳实施例而已,当然不能以此来限定本技术之权利范围,因此依本技术权利要求所作的等同变化,仍属本技术所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1