一种双工位焊接机的制作方法
1.本实用新型属于机械技术领域,特别是一种双工位焊接机。
背景技术:
2.pet材料的引用领域比较广泛,在pet材料生产出来时,pet板材的厚度有限,其厚度不够用于生产超过其厚度的产品,因此需要将多个pet板材焊接在一起,然后重新对其进行分切,从而得到需要的pet板材厚度。
3.在焊接过程中,一般需要将两个pet板的表面进行融化,然后将两个pet板挤压在一起,但是在焊接过程中,需要保持一段时间以使其粘合的更加牢固,因此,用于加热pet板的加热机构处于不是用状态,只能够等待两个pet板焊接完成后,才能够输入新的pet板,才能够继续操作,在效率上比较低。
技术实现要素:
4.本实用新型的目的是针对现有的技术存在上述问题,提出了一种双工位焊接机,具有提高焊接效率的特点。
5.本实用新型的目的可通过下列技术方案来实现:
6.一种双工位焊接机,其特征在于,包括
7.能够沿第一方向移动的加热组件;
8.两个分别设置在所述加热组件两侧的压合机构,所述压合机构包括
9.辅助组件,所述辅助组件包括用于放置并固定待压合pet板的放置部,所述放置部能够沿第二方向移动;
10.主动压合组件,所述主动压合组件包括用于固定pet板的固定部,所述固定部能够沿第二方向移动;和
11.输入组件,所述输入组件用于将pet板输送至所述固定部上;
12.其中,所述加热组件能够移动至所述放置部与所述固定部之间,所述加热组件能够对所述固定部上的pet板、放置部上的pet板加热以使表面融化。
13.在上述双工位焊接机中,所述加热组件包括
14.加热板,所述加热板能够沿所述第一方向移动,所述加热板具有相对设置的两个加热面;和
15.第一驱动件,所述第一驱动件与所述加热板传动连接,用于带动所述加热板沿所述第一方向移动。
16.在上述双工位焊接机中,所述辅助组件还包括
17.至少一个导轨部,所述放置部相对滑动的设置在所述导轨部上方;
18.第一齿条,所述第一齿条沿第二方向设置,
19.第二驱动件,所述第二驱动件通过齿轮结构与所述第一齿条传动连接,所述第二驱动件固定在所述放置部上;和
20.第一真空海绵吸盘,所述第一真空海绵吸盘固定在所述放置部上。
21.在上述双工位焊接机中,所述固定部上固定有第二真空海绵吸盘;所述主动压合组件还包括第三驱动件,所述第三驱动件与所述固定部固定连接且用于带动所述固定部沿第二方向移动。
22.在上述双工位焊接机中,所述输入组件还包括
23.固定架;
24.输送辊道,所述输送辊道设置在所述固定架上;
25.机械手,所述机械手用于将pet板转移至输送辊道上;
26.承接架,所述承接架设置在所述输送辊道的输出端,所述承接架能够在第一位置和第二位置之间活动;
27.连接件,所述连接件一端铰接在所述固定架上,且另一端与所述承接架固定相连;
28.第四驱动件,所述第四驱动件与所述承接架传动连接,用于带动所述承接架在第一位置和第二位置之间活动;
29.移动架,所述移动架能够沿第一方向移动;
30.第五驱动件,所述第五驱动件与所述移动架传动连接,用于带动移动架沿第二方向移动;
31.若干吸盘,所述吸盘固定在所述移动架上;
32.其中,在第一位置时,所述承接架的较高一端与所述输送辊道的输出端相接,且所述承接架倾斜设置;在第二位置时,所述承接架竖直设置。
33.在上述双工位焊接机中,所述压合机构还包括用于调节辅助组件上pet在第一方向上位置的调节组件,所述调节组件包括
34.推板;
35.第二齿条,所述第二齿条沿所述第一方向设置;
36.第六驱动件,所述第六驱动件固定在所述推板上,所述第六驱动件通过齿轮结构与所述第二齿条传动连接,用于带动所述推板沿第一方向移动。
37.与现有技术相比,本实用新型具有以下优点:
38.由于两个pet板粘合过程中需要一段时间,以使其粘合并冷却固定,因此同时在加热组件的两侧都设置了压合机构,在其中一个压合机构中的pet板在粘合固定时,加热组件转移至另一个压合机构中进行加热使用,从而大大的提升了焊接效率。
附图说明
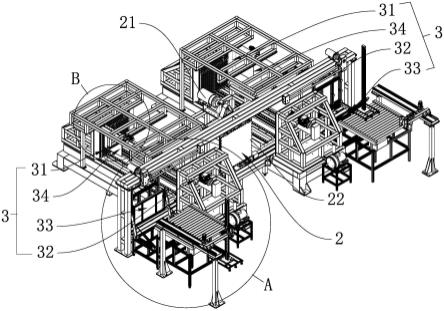
39.图1是本技术中的一种立体结构示意图;
40.图2是本技术中的一种俯视结构示意图;
41.图3是本技术中的一种侧视结构示意图;
42.图4是图1中a处的一种放大结构示意图;
43.图5是图2中b处的一种放大结构示意图。
44.图中,
45.2、加热组件;21、第一驱动件;22、加热板;
46.3、压合机构;
47.31、辅助组件;311、放置部;312、导轨部;313、第一齿条;314、第二驱动件;315、第一真空海绵吸盘;
48.32、主动压合组件;321、固定部;322、第二真空海绵吸盘;323、第三驱动件;
49.33、输入组件;331、固定架;332、输送辊道;333、机械手;334、承接架;335、连接件;336、第四驱动件;337、移动架;338、第五驱动件;339、吸盘;
50.34、调节组件;341、推板;342、第二齿条;343、第六驱动件。
具体实施方式
51.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
52.如图1至图4所示,一种双工位焊接机,包括能够沿第一方向a1移动的加热组件2和两个分别设置在加热组件2两侧的压合机构3,压合机构3包括辅助组件31、主动压合组件32和输入组件33,辅助组件31包括用于放置并固定待压合pet板的放置部311,放置部311能够沿第二方向a2移动;主动压合组件32包括用于固定pet板的固定部321,固定部321能够沿第二方向a2移动;输入组件33用于将pet板输送至固定部321上;其中,加热组件2能够移动至放置部311与固定部321之间,加热组件2能够对固定部321上的pet板、放置部311上的pet板加热以使表面融化。
53.本技术中,将pet板放置在输入组件33内,并通过输入组件33将pet板输送至放置部311与固定部321之间,然后固定部321朝向pet板方向移动并与pet板接触,然后固定部321将pet板固定住并从输入组件33上带离,然后主动压合组件32的固定部321与辅助组件31的放置部311配合,以使固定部321上的pet板转移到放置部311上,然后继续通过输入组件33输入新的pet板,在新的pet板输入至主动压合组件32的固定部321上后,启动加热组件2,加热组件2移动至两个pet板之间,并通过移动放置部311和固定部321,使位于放置部311上的pet板和固定部321上的pet板与加热组件2接触,以使pet板表面略微融化,然后放置部311与固定部321带动pet板脱离加热组件2,加热组件2从两者之间移动出,然后固定部321带动pet板朝向放置部311上的pet板移动并使两个pet板粘合在一起。后续可以重复以上操作,直至将多个pet板焊接在一起。
54.由于两个pet板粘合过程中需要一段时间,以使其粘合并冷却固定,因此同时在加热组件2的两侧都设置了压合机构3,在其中一个压合机构3中的pet板在粘合固定时,加热组件2转移至另一个压合机构3中进行加热使用,从而大大的提升了焊接效率。
55.具体地,加热组件2包括加热板22和第一驱动件21,加热板22能够沿第一方向a1移动,加热板22具有相对设置的两个加热面;第一驱动件21与加热板22传动连接,用于带动加热板22沿第一方向a1移动。
56.本技术中,第一驱动件21为驱动电机,驱动电机通过同步带轮结构与加热板22传动连接,在驱动电机驱动转动后,可带动加热板22沿着第一方向a1上来回移动。
57.本实施例中提到的同步带轮结构属于常规机械中的传动结构,在这边不在详细赘述。
58.优选的,设置一个上导轨和下导轨,加热板22的上下两端分别与上导轨和下导轨滑动连接,以使加热板22移动更加稳定。
59.具体地,辅助组件31还包括至少一个导轨部312、第一齿条313、第二驱动件314和第一真空海绵吸盘315,放置部311相对滑动的设置在导轨部312上方,第一齿条313沿第二方向a2设置,第二驱动件314通过齿轮结构与第一齿条313传动连接,第二驱动件314固定在放置部311上,第一真空海绵吸盘315固定在放置部311上。
60.本技术中,在pet板通过纺织部上的第一真空海绵吸盘315进行固定,在固定后通过可通过第二驱动件314通过齿轮结构带动自身沿着第一齿条313移动,从而实现带动放置部311的移动。在带动pet板移动过程中,可通过的导轨部312承载pet板。
61.本实施例中,齿条处于固定不动的状态。
62.具体地,固定部321上固定有第二真空海绵吸盘322;主动压合组件32还包括第三驱动件323,第三驱动件323与固定部321固定连接且用于带动固定部321沿第二方向a2移动。
63.本技术中,通过第二真空海绵吸盘322将pet板吸附固定,然后通过第三驱动件323带动固定部321沿着第二方向a2移动。
64.本实施例中,第二驱动件314为推杆电机,推杆电机的推杆与固定部321相连。
65.具体地,输入组件33还包括固定架331、输送辊道332、机械手333、承接架334、连接件335、第四驱动件336、移动架337、第五驱动件338和若干吸盘339,输送辊道332设置在固定架331上;机械手333用于将pet板转移至输送辊道332上;承接架334设置在输送辊道332的输出端,承接架334能够在第一位置和第二位置之间活动;连接件335一端铰接在固定架331上,且另一端与承接架334固定相连;第四驱动件336与承接架334传动连接,用于带动承接架334在第一位置和第二位置之间活动;移动架337能够沿第一方向a1移动;第五驱动件338与移动架337传动连接,用于带动移动架337沿第二方向a2移动;吸盘339固定在移动架337上;其中,在第一位置时,承接架334的较高一端与输送辊道332的输出端相接,且承接架334倾斜设置;在第二位置时,承接架334竖直设置。
66.本技术中,可将装有pet板移动至输送轨道的下方,然后通过机械手333将pet板转移至输送辊道332上,通过输送辊道332输送,此时承接架334处于第一位置,承接架334的一端与输送辊道332的输出端相接,在pet板通过输送辊道332输送到承载架时,依靠重力,pet板自动落入承载架上,然后通过第四驱动机构推动承载件改变到第二位置上,此时pet板与吸盘339接触并通过吸盘339吸住,承载件转移至第一位置上,然后通过第五驱动件338驱动移动架337移动,使移动架337移动至固定部321的前侧。
67.本实施例中,第四驱动件336为气缸,第五驱动件338为驱动电机,驱动电机通过同步带轮结构与移动架337传动连接,同步带轮结构属于现有技术,在此不在详细赘述结构。
68.具体地,压合机构3还包括用于调节辅助组件31上pet在第一方向a1上位置的调节组件34,调节组件34包括推板341、第二齿条342和第六驱动件343,第二齿条342沿第一方向a1设置;第六驱动件343固定在推板341上,第六驱动件343通过齿轮结构与第二齿条342传动连接,用于带动推板341沿第一方向a1移动。
69.本技术中,第六驱动件343通过齿轮结构使自身沿着第二齿条342的长度方向移动,从而带动推板341沿着第二齿条342的长度方向移动,即沿着第一方向a1移动,通过推板
341推动位于放置部311上的pet板,从而调整pet板的位置。
70.本实施例中,第二齿条342处于固定不动状态。第六驱动件343为驱动电机。齿轮结构为机械传动结构中比较常见的结构,在此不在详细赘述。
71.需要说明,本发明实施例中所有方向性指示(诸如上、下、左、右、前、后
……
)仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
72.另外,在本发明中涉及“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。同时,全文中出现的“和/或”的含义为,包括三个方案,以“a和/或b”为例,包括a方案,或b方案,或a和b同时满足的方案。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
73.以上部件均为通用标准件或本技术领域人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。
74.本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1