一种手套脱模机安装结构的制作方法
1.本技术涉及手套加工的技术领域,尤其是涉及一种手套脱模机安装结构。
背景技术:
2.丁腈手套的生产线通常是在生产车间内架设导轨,导轨上可拆卸有安装有多个手模,导轨带动手模移动至各个加工工序处。手模在经过浸渍乳化与干燥后表面形成套设于手模上的手套,手套成型后经过卷边工序将手套远离手指的一端向靠近手指的方向卷起,然后导轨将手模带至手套脱模机处进行脱模。
3.现有公告号为cn214163737u的中国实用新型专利文件公开了一种手套生产线自动脱模装置,包括机架、安装于机架上并沿水平方向延伸的导轨,以及放置于手模下方的固定架,导轨上输送有手模,固定架上通过链轮与链条传动连接有安装座,安装座上朝手摸的朝向滑动连接有滑移座,固定架对应链条进程的位置设置有导向板,滑移座上设置有与导向板侧壁抵接的导向柱,滑移座上铰接有位于手模相对两侧的摆臂以及驱动摆臂摆动的开合机构,摆臂对应手模的位置设置有脱模手指,且固定架上还设置有将手套远离手指一端卷起部分落在脱离手指上的卷边恢复组件,导向板在手模输送的过程中将滑移座向远离手模方向导向,使得脱模手指将手套远离手指的一端进行脱模。
4.针对上述中的相关技术,固定架为手套脱模机的框架,安装座朝导轨的输送方向循环传动,经由导向板的导向每个滑移座在安装座上移动的距离一定,使得脱模手指最初与手模对应的位置一定,但手套具有多种大小与长度尺寸,当导轨上的手模浸泡乳胶形成不同长度的手套或更换至不同尺寸时,脱模手指与手模相对的位置可能存在偏差,导致脱模手指不易与手套配合,影响手套脱模的效率。
技术实现要素:
5.为了提高脱模手指与手模之间的适应性,本技术提供一种手套脱模机安装结构。
6.本技术提供一种手套脱模机安装结构,采用如下的技术方案:
7.一种手套脱模机安装结构,包括固定架,还包括安装于固定架上的轨道轮,以及设置于固定架相对两端并与轨道轮配合的滑轨,所述轨道轮沿垂直于导轨传输方向滚动连接于滑轨上,所述轨道轮与固定架之间设置有调节轨道轮与固定架之间垂直距离的高度调节件,所述滑轨上设置有对固定架与导轨之间水平距离进行限定的距离调节件,且所述滑轨上设置有限制轨道轮在滑轨上移动的限位件。
8.通过采用上述技术方案,固定架通过与轨道轮及滑轨配合能够滑动连接于滑轨上以适应与导轨之间的距离,并通过距离调节件对距离进行限定,使得脱模手指适应手模的高度,通过高度调节件能够调节固定架与导轨之间沿竖直方向上的距离,使得脱模手指适应手套的长度,从而提高脱模手指与手模之间的适应性,且通过限位件能够提高手套脱模时手套脱模机的稳定性。
9.可选的,所述轨道轮上设置有安装座,所述轨道轮转动连接于安装座上,所述所述
固定架相对的两端分别设置有与滑轨对应的安装杆,所述高度调节件包括安装于安装座上并滑动穿设过安装杆的第一杆,以及分别螺纹连接于第一杆靠近与远离安装座两端外壁上的第一螺母。
10.通过采用上述技术方案,第一螺母抵接于安装杆上表面与下表面能够限制安装杆在第一杆上的位置,从而调节安装杆在第一杆上的位置,进而调节固定架与导轨之间的直线距离。
11.可选的,每个所述安装座上的安装杆设置有两个。
12.通过采用上述技术方案,两个安装杆能够使安装座与安装杆之间连接的更加稳定。
13.可选的,所述距离调节件包括固定于滑轨上的立板、沿手套脱模方向滑动穿设于立板上并与固定架相抵的第二杆,以及螺纹连接于第二杆外壁上并分别与立板相对两侧外壁抵接的第二螺母。
14.通过采用上述技术方案,通过调节第二螺母的位置而调节第二杆在立板上的位置,从而对固定架的位置进行限定。
15.可选的,所述滑轨上连接有连接板,所述限位件包括连接于连接板上的第三杆、上下滑动套设于第三杆外壁上的抵接块,以及螺纹连接于第三杆外壁上并与抵接块上表面相抵的第三螺母,所述抵接块下表面抵接于安装杆上表面。
16.通过采用上述技术方案,将第三螺母抵紧抵接块上表面能够将轨道轮向下压紧滑轨,从而增大轨道轮与滑轨之间的摩擦力,使得轨道轮定位于滑轨上。
17.可选的,所述连接板上放置有配重块,所述配重块上设置有滑动穿设过抵接块的导向杆。
18.通过采用上述技术方案,导向杆能够对抵接块的移动进行导向,提高抵接块的稳定性。
19.可选的,所述滑轨的一侧设置有同步轨,所述同步轨沿导轨长度延伸方向设置有同步杆,所述连接板靠近滑轨的一端设置有滑动连接于同步杆上的同步块,且所述同步杆上设置有限制同步块滑动的限制件。
20.通过采用上述技术方案,同步杆在同步轨上滑动能够使抵接块适应固定架的移动。
21.可选的,所述限制件包括与同步块沿滑轨延伸方向两侧抵接的抱箍,所述抱箍滑动套设于同步杆上,且所述抱箍上设置有使抱箍抱紧同步杆的调节螺栓与调节螺母。
22.通过采用上述技术方案,通过将抱箍抱紧同步杆能够对抱箍进行定位,且旋松调节螺栓与调节螺母能够使抱箍松弛,从而调节抱箍的位置,使同步杆能够进行移动。
23.综上所述,本技术包括以下至少一种有益效果:
24.1.通过高度调节件能够使脱模手指适应手模的高度,通过距离调节件能够使脱模手指适应手套的长度,从而提高脱模手指与手模之间的适应性,提高手套脱模的效率;
附图说明
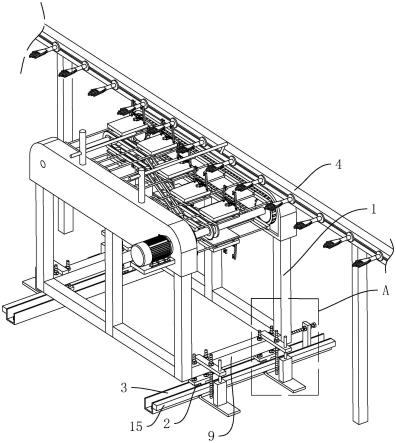
25.图1是本技术实施例的整体结构示意图;
26.图2是图1中a处的放大结构示意图;
27.图3是本技术实施例同步轨的剖视图;
28.图4是图3中b处的放大结构示意图。
29.附图标记说明:1、固定架;2、轨道轮;3、滑轨;4、导轨;5、高度调节件;51、第一杆;52、第一螺母;6、距离调节件;61、立板;62、第二杆;63、第二螺母;7、限位件;71、第三杆;72、抵接块;73、第三螺母;8、安装座;9、安装杆;10、连接板;11、配重块;12、导向杆;13、同步轨;14、活动腔;15、同步杆;16、同步块;17、限制件;171、抱箍;18、延伸片;19、调节螺栓;20、调节螺母。
具体实施方式
30.以下结合附图1-4对本技术作进一步详细说明。
31.本技术实施例公开一种手套脱模机安装结构。参照图1,手套脱模机安装结构包括滑轨3、与滑轨3配合的轨道轮2,以及与轨道轮2连接的手套脱模机的固定架1。滑轨3具有两个并通过螺栓固定于地面上,两个滑轨3分别与固定架1沿导轨4传输方向的相对两端对应,且滑轨3的长度延伸方向垂直导轨4的传输方向,固定架1每端连接的轨道轮2设置有两个,轨道轮2沿滑轨3长度延伸方向滚动连接于导轨4上。
32.参照图2和图3,轨道轮2连接有安装座8,且轨道轮2转动连接于安装座8上,为了使脱模手指适应手模的高度,轨道轮2与安装座8之间具有用于调节轨道轮2与安装架之间垂直距离的高度调节件5。
33.具体的,固定架1相对的两端下部均固定连接有安装杆9,安装杆9与滑轨3一一对应,安装杆9的长度延伸方向平行于滑轨3长度延伸方向,且安装杆9位于安装座8的正上方。高度调节件5包括通过螺栓固定于安装座8上的第一杆51,以及螺纹连接于第一杆51外壁上的第一螺母52。
34.其中,第一杆51的轴线沿竖直方向延伸,第一杆51沿竖直方向向上穿设过安装杆9,且每个安装座8上的第一杆51沿安装杆9长度延伸方向设置有两个,每个安装杆9上的第一螺母52设置有两个,两个第一螺母52分别抵紧于安装杆9的上表面与下表面,以限制安装杆9在第一杆51上滑动,从而通过第一螺母52调节安装杆9在第一杆51竖直方向上的位置,即能够调节固定架1与安装座8之间的垂直距离,从而将脱模手指的位置适应手模的高度。
35.参照图2和图3,为了使脱模手指适应手套的长度,滑轨3上具有调节固定架1与导轨4之间水平距离的距离调节件6。具体的,距离调节件6包括固定于滑轨3一端上的立板61、沿滑轨3延伸方向滑动穿设于立板61上的第二杆62,以及螺纹连接于第二杆62外壁上的第二螺母63。
36.其中,立板61沿竖直方向向上延伸并固定于固定架1靠近导轨4的一侧,第二杆62的一端端壁与固定架1靠近导轨4的一侧外侧壁相抵。每个第二杆62上的第二螺母63设置有两个,两个第二螺母63分别与立板61靠近与远离固定架1的两侧相抵,以对第二杆62进行定位。通过调节第二杆62在立板61上的位置,以调节立板61以及固定架1之间的水平距离,从而调节固定架1与导轨4之间的水平距离,使得脱模手指的位置适应手套的长度。
37.参照图2和图3,为了提高固定架1的稳定性,滑轨3上具有限制轨道轮2在滑轨3上滚动的限位件7。具体的,滑轨3一侧外壁上连接有与地面抵接的连接板10,限位件7包括固定于连接板10上表面的第三杆71,上下滑动套设于第三杆71外壁上的抵接块72,以及螺纹
连接于第三杆71外壁上的第三螺母73。
38.其中,第三杆71的轴线沿竖直方向延伸,且第三杆71上端向上超出安装杆9上表面。抵接块72的一端延伸至抵接块72下表面与安装杆9上表面抵接,每个第三杆71外壁上的第三螺母73设置有一个并抵紧于抵接块72上表面,从而抵接块72给予轨道轮2向下的力,以使轨道轮2向下抵紧滑轨3,从而提高轨道轮2与滑轨3之间的摩擦力,限制轨道轮2在滑轨3上移动。
39.当需要调节固定架1与导轨4之间的水平距离时,旋松第三螺母73以使抵接块72能够与抵接块72分离,从而使固定架1能够在导轨4上滑动。当固定架1与导轨4之间的水平距离调节完成后,将抵接块72抵紧安装杆9上表面,以使固定架1定位。
40.参照图3,为了提高抵接杆的稳定性,连接板10上表面放置有具有一定重量的配重块11,配重块11上表面固定有沿竖直方向向上穿设过抵接块72的导向杆12,配重块11在无外力作用下通过自身重力定位于连接板10上,且导向杆12呈轴线沿竖直方向延伸的圆杆状结构,抵接块72上下移动时同时滑动套设于第三杆71与导向杆12外壁上,从而能够对抵接块72的移动进行导向。
41.抵接块72的位置与数量均与安装座8一一对应,且与安装座8对应的抵接块72位于安装座8的两个第一杆51之间,以使抵接块72靠近轨道轮2对轨道轮2的作用力增强。
42.参照,1和图3,为了使轨道轮2移动时,抵接块72也能够一同移动,两个滑轨3相互远离的一侧均固定有同步轨13,同步轨13位于滑轨3的上侧,且同步轨13具有开口朝下的活动腔14,活动腔14内固定有同步杆15,同步杆15呈圆杆状结构,且同步杆15的轴线方向平行于滑轨3的长度延伸方向。连接板10靠近滑轨3的一端固定有竖直向上延伸至活动腔14内的同步块16,同步块16沿滑轨3的长度延伸方向滑动于活动腔14内,同步块16上端呈与同步杆15配合的半弧形型结构,以使轨道轮2移动时,连接板10能够移动至与轨道轮2相对的位置上,且同步杆15上具有限制同步块16滑动的限制件17,以对连接板10进行限位。
43.参照图4,限制件17包括滑动套设于同步杆15外壁上的抱箍171,每个同步块16对应两个抱箍171,两个抱箍171分别抵接于同步块16沿滑轨3长度延伸方向上的两侧侧壁,从而限制同步块16在同步轨13内滑动。
44.抱箍171具有一定的弹性并且抱箍171内壁具有与同步杆15外壁接触的橡胶层,且抱箍171开口处的两侧均具有向下延伸的延伸片18,两个相对的延伸片18之间穿设有同一个调节螺栓19,调节螺栓19螺纹连接有调节螺母20,调节螺母20旋进时两个相对的延伸片18相互靠近,使得抱箍171抱紧同步杆15以对抱箍171定位,调节螺母20旋松时抱箍171与同步杆15外壁之间的摩擦力变小,抱箍171能够在同步杆15外壁上滑动。
45.本技术实施例一种手套脱模机安装结构的实施原理为:通过调节第一螺母52在第一杆51上的位置以调节安装座8与安装杆9之间的位置,使得脱模手指适应手模的高度;滑动第二杆62并通过第二螺母63将第二杆62定位于立板61上,并将固定架1与第二杆62抵接,使得脱模手指适应待脱模手套的长度;通过将连接板10滑动至与安装座8相对的位置上,使抵接块72抵接于安装杆9并位于安装座8的两个第一杆51之间,并通过第三螺母73井抵接块72向下抵紧安装杆9,带动轨道轮2与滑轨3之间的摩擦力增大,使轨道轮2定位于滑轨3上。
46.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1