下沉式3D打印机及3D打印方法与流程
本发明涉及3d打印,尤其涉及下沉式3d打印机及3d打印方法。
背景技术:
1、3d打印机将计算机辅助设计与材料加工成型技术相结合,通过控制系统和编程软件将各种材料逐层堆积成实体制品,制品按照光机投影在打印平台上自下而上地堆积形成实际图像。现有技术中的3d光固化打印机依据光机的设置位置主要分为两类,一类是上拉式3d打印机,一类是下沉式3d打印机。
2、其中,现有的下沉式3d打印机在进行3d打印时,打印平台向下移动使树脂槽内的树脂附着于打印平台表面,然后将打印平台上移至指定位置,再由刮刀上的激光测距仪检测液位,并调整刮刀及光机至指定位置,当树脂的液位高度发生变化时,依据刮刀上的激光测距仪的检测数据,调整刮刀与光机移动,可以理解的是,始终以树脂的液位高度为基准进行刮刀刮料和曝光操作。但这种下沉式3d打印机在进行3d打印时,存在以下缺点:
3、1)激光测距仪位于可移动/转动的刮刀上,刮刀的安装精度及运动产生的振动都会影响激光测距仪的检测精度,且激光测距仪会限制刮刀的转动速度;
4、2)由于光机体积及重量较大,使得光机的升降过程会限制下沉式3d打印机的打印速度;
5、3)激光测距仪和光机均为电器元件,需要走线,故设置激光测距仪位于可移动/转动的刮刀上会增大走线难度,光机的升降也会增大走线难度;
6、4)调节刮刀移动和调节光机移动需要依次进行,限制了下沉式3d打印机的打印速度;且重复移动刮刀和光机,使得刮刀和光机需要多次重复定位,定位误差会影响打印精度。
技术实现思路
1、本发明的目的在于提供下沉式3d打印机及3d打印方法,以解决现有的下沉式3d打印机的打印速度低,且打印精度差的问题。
2、为达此目的,本发明采用以下技术方案:
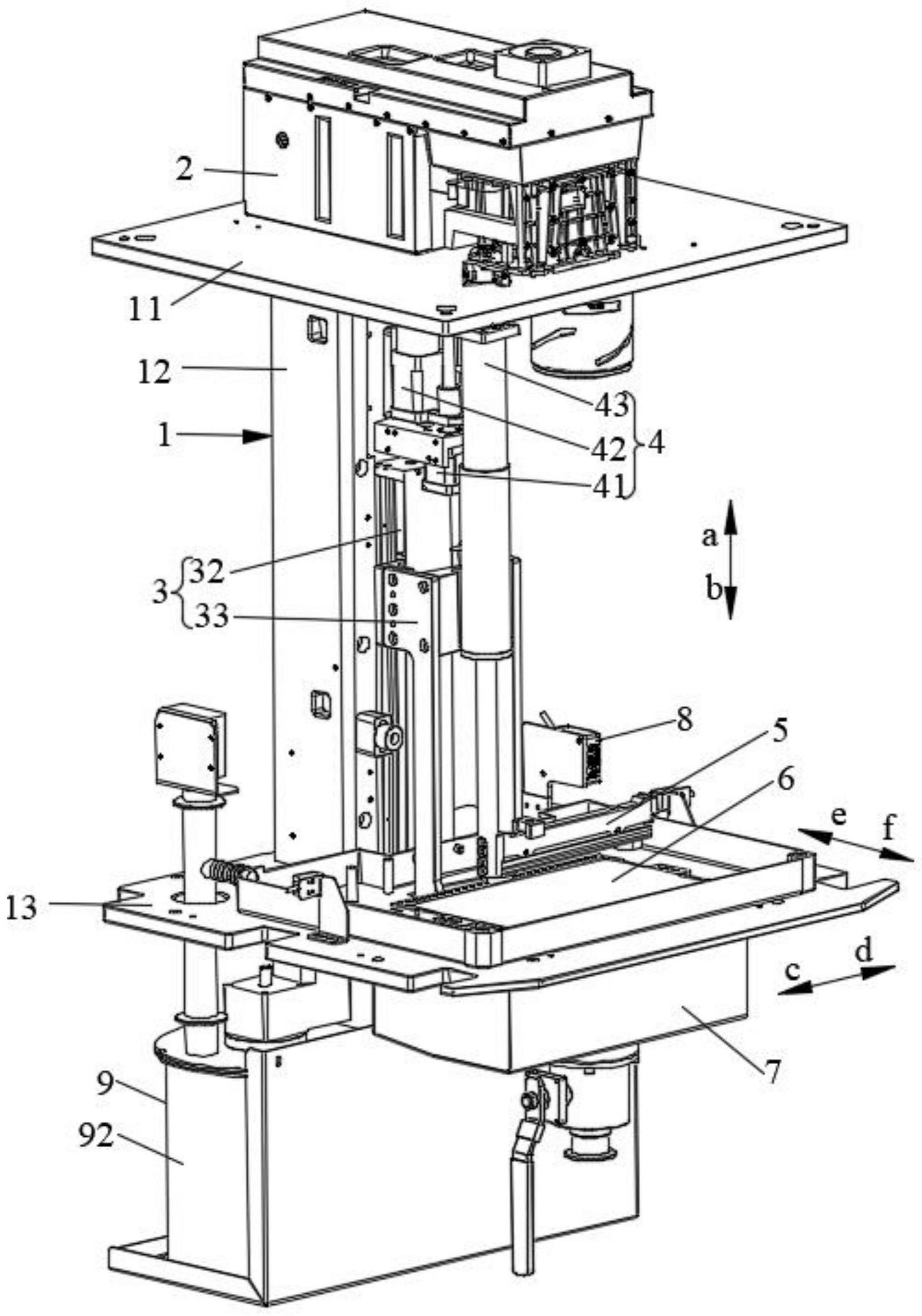
3、下沉式3d打印机,其包括工作台,以及设置于所述工作台的光机、第一驱动机构、第二驱动机构、刮刀、打印平台、树脂槽、激光位移传感器和液位调节机构,所述第一驱动机构的输出端与所述打印平台连接,所述第一驱动机构能够带动所述打印平台沿所述工作台的高度方向升降,所述第二驱动机构的输出轴与所述刮刀连接,所述第二驱动机构能带动所述刮刀沿所述工作台的高度方向升降,且能带动所述刮刀绕所述第二驱动机构的输出轴转动,所述第二驱动机构的输出轴与所述工作台的高度方向平行,所述激光位移传感器用于监测所述树脂槽内的液位高度,所述液位调节机构能够向所述树脂槽内输送树脂,或抽取所述树脂槽内的树脂;
4、所述光机、所述第二驱动机构、所述刮刀、所述打印平台、所述树脂槽和所述液位调节机构沿所述工作台的高度方向自上而下间隔设置。
5、作为优选,所述第一驱动机构包括第一电机、第一滚轴丝杆组件和呈l形的连接件,所述第一电机固定设置于所述工作台,所述第一滚轴丝杆组件包括螺纹配合的第一丝杆和第一丝杆螺母,所述第一电机的输出轴与所述第一丝杆固定连接,所述第一丝杆螺母沿所述工作台的高度方向滑动设置于所述工作台且与所述连接件的一端连接,所述打印平台固定设置于所述连接件的另一端;
6、沿所述工作台的高度方向,所述第一驱动机构位于所述液位调节机构和所述光机之间。
7、作为优选,所述下沉式3d打印机包括工作台还包括控制器,所述控制器与所述光机、所述第一驱动机构、所述第二驱动机构、所述激光位移传感器和所述液位调节机构均电连接。
8、3d打印方法,其用于控制上述的下沉式3d打印机,所述3d打印方法包括:
9、控制所述打印平台从所述树脂槽内获取树脂;
10、控制所述刮刀从第一初始位置沿第一时针方向旋转设定角度刮平所述打印平台上的树脂,使得所述打印平台上的树脂的厚度为设定层厚;
11、控制所述刮刀向上上升第一设定距离;
12、静置所述下沉式3d打印机设定静置时长;
13、控制所述光机曝光打印图片;
14、获取所述树脂槽内树脂的液位高度;
15、判断所述树脂槽内树脂的液位高度是否在设定液位高度范围内;
16、若所述树脂槽内树脂的液位高度在设定液位高度范围内,则控制所述刮刀回到所述第一初始位置,以及控制所述打印平台再次从所述树脂槽内获取树脂同时进行;
17、若所述树脂槽内树脂的液位高度未在设定液位高度范围内,则控制所述刮刀回到所述第一初始位置、控制所述液位调节机构调节所述树脂槽的液位高度在设定液位高度范围内,以及控制所述打印平台再次从所述树脂槽内获取树脂同时进行。
18、作为优选,控制所述打印平台从所述树脂槽内获取树脂的具体步骤包括:
19、控制所述打印平台从第二初始位置向下下降第二设定距离浸入至所述树脂槽内;
20、第一设定时长后,控制所述打印平台向上上升所述二设定距离,到达第二初始位置。
21、作为优选,控制刮刀回到所述第一初始位置的具体步骤包括:
22、控制所述刮刀沿第二时针方向旋转所述设定角度,所述第二时针方向和所述第一时针方向为相反时针方向;
23、控制所述刮刀向下下降所述第一设定距离。
24、作为优选,所述第二驱动机构的输出轴位于所述打印平台沿长度方向的中间位置,且位于所述打印平台沿宽度方向的一侧;
25、所述设定角度大于等于135度。
26、作为优选,控制所述打印平台再次从所述树脂槽内获取树脂的具体步骤包括:
27、控制所述打印平台从第二初始位置向下下降第三设定距离浸入至所述树脂槽内;
28、第一设定时长后,控制所述打印平台向上上升所述第四设定距离;
29、其中,所述第四设定距离=所述第三设定距离-所述设定层厚。
30、作为优选,若所述树脂槽内树脂的液位高度大于设定液位高度范围的最大值,则控制所述液位调节机构抽取所述树脂槽内的树脂,直至所述树脂槽内的树脂的液位高度在设定液位高度范围内;
31、若所述树脂槽内树脂的液位高度小于设定液位高度范围的最小值,则控制所述液位调节机构向所述树脂槽内输送树脂,直至所述树脂槽内的树脂的液位高度在设定液位高度范围内。
32、作为优选,控制所述液位调节机构调节所述树脂槽的液位高度在设定液位高度范围内的调节时长<控制所述打印平台再次从所述树脂槽内获取树脂的总时长。
33、本发明的有益效果:
34、本发明的目的在于提供了下沉式3d打印机及3d打印方法,该下沉式3d打印机包括工作台,以及设置于工作台的光机、第一驱动机构、第二驱动机构、刮刀、打印平台、树脂槽、激光位移传感器和液位调节机构,当进行3d打印时,第一驱动机构带动打印平台沿工作台的高度方向向下移动浸入树脂槽内,然后再带动打印平台沿工作台的高度方向向上移动,此时,打印平台仍然处于树脂槽的树脂内,可以理解的是,在整个打印过程中,打印平台始终处于树脂槽内的树脂内,第二驱动机构带动刮刀旋转刮平打印平台上的树脂,使得打印平台上模型上部成型面新增的树脂的厚度为设定层厚,再通过第二驱动机构带动刮刀向上上升远离打印平台,静置打印平台设定静置时长后,再通过光机曝光打印图片,刮刀回到初始位置,以完成一次3d打印过程,重复上述过程直至3d打印结束。其中,通过将光机固定设置于工作台的最上端,将激光位移传感器固定设置于工作台且激光位移传感器位于树脂槽之上,可以理解的是,在进行3d打印的过程中,光机和激光位移传感器的位置始终不变,仅需要调节打印平台的工作位置,且在进行每一次打印时,刮刀始终位于同一高度位置进行旋转刮平打印平台上的树脂,从而有效避免了现有技术中由于光机和激光位移传感器移动导致的影响打印速度和精度的问题,可以理解的是,光机在对打印平台上的树脂进行曝光打印时,打印平台上的树脂处于静态的恒定液位,能够有效提升打印成型的模型的表面质量,避免模型表面产生横纹,从而有效避免了现有技术中由于光机和激光位移传感器移动导致的影响打印精度的问题,也避免了现有技术中由于光机的体积和重量大导致的影响打印速度的问题,降低了光机和激光位移传感器的走线难度;其次,设置第一驱动机构能够带动打印平台沿工作台的高度方向升降,第二驱动机构能带动刮刀沿工作台的高度方向升降,且能带动刮刀绕第二驱动机构的输出轴转动,可以理解的是,第一驱动机构带动打印平台沿工作台的高度方向从树脂槽内获取树脂的过程与第二驱动机构带动刮刀绕第二驱动机构的输出轴转动和沿工作台的高度方向升降调整至工作位置的过程可同步进行,从而进一步提高了打印速度。
- 还没有人留言评论。精彩留言会获得点赞!