一种复合材料纤维筒体缠绕过程中的导引及张力控制机构的制作方法
本发明属于纤维缠绕,具体涉及一种复合材料纤维筒体缠绕过程中的导引及张力控制机构。
背景技术:
1、复合材料具有高强度、高模量、高刚度、优良的减振性、耐疲劳和耐蚀性等优异特点,被广泛用于国防科学技术、新能源行业与土木工程等领域。复合材料使用含量已成为评估航空航天器性能的重要指标之一。
2、在树脂基复合材料的生产技术中,纤维缠绕技术是最早发展、应用最广泛的加工技术,也是最重要的生产技术之一。纤维缠绕技术作为一种成型技术,通过导丝器和筒体芯模之间的相对运动,按照一定的规则将纤维缠绕在筒体芯模上,从而制成复合材料组件。纤维缠绕复合材料的成型工艺是目前使用最广泛、效率最高、成型效果最好的成型工艺,其产品性能均匀、稳定。
3、目前,我国的纤维缠绕技术正处于成熟的发展时期。机械式缠绕机结构简单,制造成本低,可靠性和特异性高,通过执行器之间的机械传动关系,可实现纤维在模具上的缠绕。机械式缠绕机主要针对的是固定形状的模具或指定的纤维纱线轨迹。对于具有特殊形状或复杂纱线布置的组件,大多采用数控式缠绕机,但是不能进行纱线的导引、张力的调节以及x向、y向、z向的运动。
技术实现思路
1、为解决现有技术中存在的技术问题,本发明的目的在于提供一种复合材料纤维筒体缠绕过程中的导引及张力控制机构。
2、为实现上述目的,达到上述技术效果,本发明采用的技术方案为:
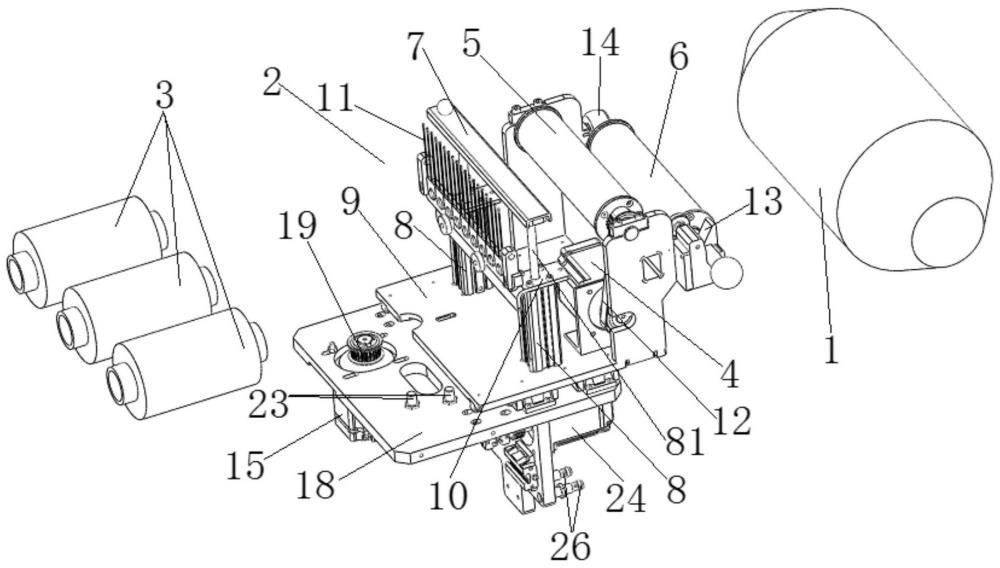
3、一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,包括筒体芯模和若干个纤维纱筒,所述纤维纱筒放置于纱架上,还包括导引及张力控制机构,所述纤维纱筒上的纤维纱线通过导引及张力控制机构缠绕在筒体芯模上,所述导引及张力控制机构能够进行纤维纱线的导引、张力的调节以及x向、y向、z向的运动,其中,x向可实现沿筒体芯模的轴线方向匀速运动,使筒体芯模上的纤维束螺旋状缠绕更加均匀一致,y向的抬升可在停车时将纤维抬离上导辊,以便后续操作,z向可调节纤维纱线从下导辊的出口与筒体芯模之间的距离,获得最佳的缠绕效果。
4、进一步的,所述导引及张力控制机构设置于筒体芯模与纤维纱筒之间,所述导引及张力控制机构包括滑动板、支撑板、x向运动工装、y向升降工装和z向运动工装,所述支撑板设置于滑动板下方,所述滑动板上设置y向升降工装,用于实现y向运动,所述支撑板上设置有x向运动工装,用于实现x向运动,所述滑动板和支撑板上设置有z向运动工装,用于实现z向运动。
5、进一步的,所述导引及张力控制机构还包括张力控制电机、上导辊和下导辊,所述上导辊和下导辊安装于滑动板上,所述纤维纱线由上导辊和下导辊之间穿过,所述张力控制电机与齿轮ⅰ相连,所述齿轮ⅰ通过皮带ⅰ与上导辊相连,所述上导辊由张力控制电机驱动,速度可调,从而控制上导辊面上的纱线的缠绕线速度可调,所述筒体芯模1的速度可调,所述上导辊与筒体芯模具有线速度差,用于控制缠绕时纤维纱线的内部张力。
6、进一步的,所述滑动板相对的两侧安装有锁紧扣和关节轴承,所述下导辊一端通过锁紧扣锁定于滑动板上,其另一端与关节轴承相连,当机器停车需要整理纤维纱线时,将锁紧扣打开,所述下导辊能够绕关节轴承转动,从而将下导辊移开被压紧的纤维纱线。
7、进一步的,所述x向运动工装包括x向运动控制电机、导向滑块和感应开关ⅱ,所述x向运动控制电机与齿轮ⅳ相连,所述齿轮ⅳ与机器底座上的齿条相啮合,所述导向滑块与机器上的滑轨相配合,所述机器上的滑轨能够在导向滑块的导向作用下往复运动,拖动整个机构沿x向运动,运动的极限位置通过设置感应开关ⅱ进行限制。
8、进一步的,所述y向升降工装包括抬杆和抬杆气缸,所述抬杆气缸设置有两组,对称布置于滑动板相对的两侧,两组抬杆气缸同步升降,两组抬杆气缸的伸缩杆分别与抬杆相对的两侧相连接,通过抬杆气缸控制伸缩杆的伸缩实现抬杆的y向升降运动。
9、进一步的,两组抬杆气缸上设置有导引片固定板,所述导引片固定板上设置有若干间隔排布的导引片,通过导引片将纤维纱线平行隔离开来,防止纤维纱线在缠绕传导过程中相互间的纠结干扰。
10、进一步的,所述z向运动工装包括z向运动控制电机、z向导轨和z向滑块,所述z向运动控制电机设置于支撑板上,所述z向导轨设置有两条,对称布置于滑动板底部相对的两侧,所述支撑板上设置有与z向导轨相适配的若干个z向滑块,每条z向导轨能够在同侧的z向滑块的导向作用下往复运动,所述z向运动控制电机与齿轮ⅱ相连,所述齿轮ⅱ通过齿形带与支撑板上的齿轮ⅲ相连,所述齿形带夹于滑动板背面设置的齿形压板和搭子之间,通过z向运动控制电机控制齿轮ⅱ转动,通过齿形带带动齿轮ⅲ转动,进而带动滑动板及其上的下导辊通过z向导轨在z向滑块的导向作用下进行z向运动,从而能够调节下导辊与筒体芯模之间相对的位置以获得更好的缠绕效果,运动极限位置通过设置感应开关ⅰ进行限制。
11、进一步的,所述z向滑块共有四个,每两个z向滑块为一组,每条z向导轨能够在同侧的一组z向滑块的导向作用下往复运动。
12、进一步的,所述滑动板和支撑板呈l型。
13、与现有技术相比,本发明的有益效果为:
14、1)可以对纤维纱线缠绕过程中的张力进行实时控制,通过控制筒体芯模与上导辊之间的线速度差,来调整纤维纱线内部的张力,以满足缠绕工艺的要求。
15、2)各纤维纱筒喂入纤维纱线时,通过导引片导引各根纤维纱线,纤维纱线之间平行并列,运行时不会产生相互间的缠绕纠结及干扰。
16、3)下导辊为可以快速拆卸打开的结构,在停车处理纤维时方便快捷。
17、4)整个机构可以在x向、y向、z向进行部分或整体的移动控制,速度及位移距离可精确控制,可根据不同纤维缠绕工艺的要求进行设定,其中,x向可以实现沿筒体芯模的轴线方向匀速运动,可使筒体芯模上的纤维束螺旋状缠绕更加均匀一致,y向的抬升可以在停车时将纤维纱线抬离上导辊,以便后续的进一步操作,z向可以调节纤维纱线从下导辊的出口与筒体芯模之间的距离,从而获得最佳的缠绕效果。
技术特征:
1.一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,包括筒体芯模和若干个纤维纱筒,所述纤维纱筒放置于纱架上,其特征在于,还包括导引及张力控制机构,所述纤维纱筒上的纤维纱线通过导引及张力控制机构缠绕在筒体芯模上,所述导引及张力控制机构能够进行纤维纱线的导引、张力的调节以及x向、y向、z向的运动。
2.根据权利要求1所述的一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,其特征在于,所述导引及张力控制机构设置于筒体芯模与纤维纱筒之间,所述导引及张力控制机构包括滑动板、支撑板、x向运动工装、y向升降工装和z向运动工装,所述支撑板设置于滑动板下方,所述滑动板上设置y向升降工装,用于实现y向运动,所述支撑板上设置有x向运动工装,用于实现x向运动,实现沿筒体芯模的轴线方向匀速运动,使筒体芯模上的纤维束螺旋状缠绕更加均匀一致,所述滑动板和支撑板上设置有z向运动工装,用于实现z向运动,调节纤维纱线从下导辊的出口与筒体芯模之间的距离。
3.根据权利要求2所述的一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,其特征在于,所述导引及张力控制机构还包括张力控制电机、上导辊和下导辊,所述上导辊和下导辊安装于滑动板上,所述纤维纱线由上导辊和下导辊之间穿过,所述张力控制电机与齿轮ⅰ相连,所述齿轮ⅰ通过皮带ⅰ与上导辊相连,所述上导辊由张力控制电机驱动,速度可调,从而控制上导辊面上的纱线的缠绕线速度可调,所述筒体芯模1的速度可调,所述上导辊与筒体芯模具有线速度差,用于控制缠绕时纤维纱线的内部张力。
4.根据权利要求3所述的一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,其特征在于,所述滑动板相对的两侧安装有锁紧扣和关节轴承,所述下导辊一端通过锁紧扣锁定于滑动板上,其另一端与关节轴承相连,当机器停车需要整理纤维纱线时,将锁紧扣打开,所述下导辊能够绕关节轴承转动,从而将下导辊移开被压紧的纤维纱线。
5.根据权利要求2所述的一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,其特征在于,所述x向运动工装包括x向运动控制电机、导向滑块和感应开关ⅱ,所述x向运动控制电机与齿轮ⅳ相连,所述齿轮ⅳ与机器底座上的齿条相啮合,所述导向滑块与机器上的滑轨相配合,所述机器上的滑轨能够在导向滑块的导向作用下往复运动,拖动整个机构沿x向运动,运动的极限位置通过设置感应开关ⅱ进行限制。
6.根据权利要求2所述的一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,其特征在于,所述y向升降工装包括抬杆和抬杆气缸,所述抬杆气缸设置有两组,对称布置于滑动板相对的两侧,两组抬杆气缸同步升降,两组抬杆气缸的伸缩杆分别与抬杆相对的两侧相连接,通过抬杆气缸控制伸缩杆的伸缩实现抬杆的y向升降运动。
7.根据权利要求6所述的一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,其特征在于,两组抬杆气缸上设置有导引片固定板,所述导引片固定板上设置有若干间隔排布的导引片,通过导引片将纤维纱线平行隔离开来,防止纤维纱线在缠绕传导过程中相互间的纠结干扰。
8.根据权利要求2所述的一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,其特征在于,所述z向运动工装包括z向运动控制电机、z向导轨和z向滑块,所述z向运动控制电机设置于支撑板上,所述z向导轨设置有两条,对称布置于滑动板底部相对的两侧,所述支撑板上设置有与z向导轨相适配的若干个z向滑块,每条z向导轨能够在同侧的z向滑块的导向作用下往复运动,所述z向运动控制电机与齿轮ⅱ相连,所述齿轮ⅱ通过齿形带与支撑板上的齿轮ⅲ相连,所述齿形带夹于滑动板背面设置的齿形压板和搭子之间,通过z向运动控制电机控制齿轮ⅱ转动,通过齿形带带动齿轮ⅲ转动,进而带动滑动板及其上的下导辊通过z向导轨在z向滑块的导向作用下进行z向运动,运动极限位置通过设置感应开关ⅰ进行限制。
9.根据权利要求8所述的一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,其特征在于,所述z向滑块共有四个,每两个z向滑块为一组,每条z向导轨能够在同侧的一组z向滑块的导向作用下往复运动。
10.根据权利要求2所述的一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,其特征在于,所述滑动板和支撑板呈l型。
技术总结
本发明公开了一种复合材料纤维筒体缠绕过程中的导引及张力控制机构,包括筒体芯模、导引及张力控制机构和若干个纤维纱筒,纤维纱筒上的纤维纱线通过导引及张力控制机构缠绕在筒体芯模上,导引及张力控制机构能够进行纤维纱线的导引、张力的调节以及X向、Y向、Z向的运动。本发明通过控制筒体芯模与上导辊之间的线速度差来调整纤维纱线内部的张力;通过导引片导引各根纤维纱线,运行时不会产生相互间的缠绕纠结及干扰;X向可实现沿筒体芯模的轴线方向匀速运动,使筒体芯模上的纤维束螺旋状缠绕更加均匀一致,Y向的抬升可在停车时将纤维抬离上导辊,以便后续操作,Z向可调节纤维纱线从下导辊的出口与筒体芯模之间的距离,获得最佳的缠绕效果。
技术研发人员:梁吉芹
受保护的技术使用者:常州揽滆科技有限公司
技术研发日:
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!