一种带环境光检测组件的吸油烟机的制作方法
1.本实用新型涉及吸油烟机技术领域,尤其涉及一种吸油烟机的手势识别技术。
背景技术:
2.目前,市面上越来越多的吸油烟机产品带有手势功能,直接用简单的几个手势就可以完成烟机大部分的功能,给消费者带来了较好的体验。现有吸油烟机红外手势方案都是采用红外发射管发射红外线后,通过红外接收管进行接收反射回来的红外线,如果红外接收管接收到发出的红外线发射回来的信号,则确定有物体从窗口上方经过,则进行判断手势动作,达到以较低的成本来提升产品体验的效果。
3.几乎任何物体都能反射红外线,当红外发射管发射红外线后,任何物体在红外接收窗口经过时都有可能反射红外线,红外接收管接收到发射的红外线后,进行手势判断,如果符合判断规则,则进行相应的手势功能。在该判断方式下,当非人手经过红外接收窗口时,可能被判断为正常的手势功能,如人走过烟机并满足感应距离要求时,人体的衣服可以反射红外线,如果人行走的速度在预设手势动作的速度范围以内,就会被误判断为正常的手势功能,从而造成吸油烟机误触发的风险。
技术实现要素:
4.本实用新型旨在至少在一定程度上解决现有相关技术中存在的问题之一,为此,本实用新型提出一种带环境光检测组件的吸油烟机,可降低非人手的物体被误判为手势功能的概率,提升产品的可靠性。
5.本实用新型还提供了一种应用该吸油烟机的控制方法。
6.根据上述提供的一种带环境光检测组件的吸油烟机,其通过如下技术方案来实现:
7.一种带环境光检测组件的吸油烟机,包括:手势识别装置,包括收发组件和环境光检测组件,所述收发组件设置于吸油烟机机体上用于发射和接收感应信号,所述环境光检测组件设置于吸油烟机机体上用于实时检测环境光线的光照强度;主控制器,分别与所述收发组件和所述环境光检测组件电性连接,所述主控制器用于根据所述收发组件接收到感应信号前后的光照强度偏差p,还用于根据光照强度偏差p与至少一个参考值的比较结果来确定是否进行手势识别判断。
8.在一些实施方式中,所述主控制器设有控制面板,所述环境光检测组件包括分别与所述主控制器电性连接的第一环境光检测模块和第二环境光检测模块,所述第一环境光检测模块和所述第二环境光检测模块分别设置于吸油烟机机体上并位于所述控制面板的相对两侧。
9.在一些实施方式中,所述控制面板设有手势功能按键,在开启所述手势功能按键后,所述主控制器用于通过所述环境光检测组件获取所述收发组件接收到感应信号前后的环境光照强度l
环境
和当前光照强l
当前
,还用于根据当前光照强度l
当前
和环境光照强度l
环境
计算
光照强度偏差p。
10.在一些实施方式中,所述收发组件包括分别与所述主控制器电性连接的第一收发模块和第二收发模块,所述第一收发模块设置于吸油烟机机体上并靠近于所述第一环境光检测模块,所述第二收发模块设置于吸油烟机机体上并靠近于所述第二环境光检测模块。
11.在一些实施方式中,所述第一收发模块和所述第二收发模块均包括红外发射器、红外接收器和隔板,所述红外发射器和所述红外接收器间隔并排布置,且所述红外发射器和所述红外接收器分别与所述主控制器电性连接,所述隔板设置于所述红外发射器和所述红外接收器之间。
12.根据上述提供的一种吸油烟机的控制方法,其通过如下技术方案来实现:
13.一种吸油烟机的控制方法,其应用如上所述的一种带环境光检测组件的吸油烟机,所述控制方法包括步骤:
14.s1:进入手势识别判断程序;
15.s2:获取所述收发组件接收到感应信号前后的环境光照强度l
环境
和当前光照强l
当前
;
16.s3:根据当前光照强度l
当前
和环境光照强度l
环境
计算光照强度偏差p;
17.s4:将计算所得的光照强度偏差p与至少一个参考值进行比较,并基于比较结果来确定是否进行手势识别判断。
18.在一些实施方式中,所述主控制器设有手势功能按键,在步骤s1中,所述进入手势识别判断程序,其通过持续判断用户是否开启所述手势功能按键,如是则进入手势识别判断程序。
19.在一些实施方式中,在步骤s2中,所述获取所述收发组件接收到感应信号前后的环境光照强度l
环境
和当前光照强l
当前
,其包括:
20.s21:通过所述环境光检测组件获取环境光照强度l
环境
;
21.s22:判断所述收发组件是否接收到感应信号,如是则进入下一步,如否返回上一步;
22.s23:获取所述收发组件接收到感应信号时的当前光照强度l
当前
。
23.在一些实施方式中,在步骤s3中,所述光照强度偏差p,其通过如下公式计算所得:p=(l
环境-l
当前
)/l
环境
。
24.在一些实施方式中,在步骤s4中,所述至少一个参考值包括pmin和 pmax,如果光照强度偏差p∈[pmin,pmax],则进行手势识别判断,并在完成手势识别判断之后返回步骤s2;如果光照强度偏差p<pmin,则不进行手势识别判断并返回步骤s2;如果光照强度偏差p>pmax,则不进行手势识别判断并返回步骤s2。
[0025]
与现有技术相比,本实用新型的至少包括以下有益效果:本实用新型的带环境光检测组件的吸油烟机,通过在手势识别装置上增设环境光检测组件,并且在主控制器、环境光检测组件和收发组件的配合作用下,实现提升手势识别判断的精准性,有效降低了非人手的物体被误判为手势功能的概率,减少吸油烟机误触发的风险,提升产品的可靠性。
附图说明
[0026]
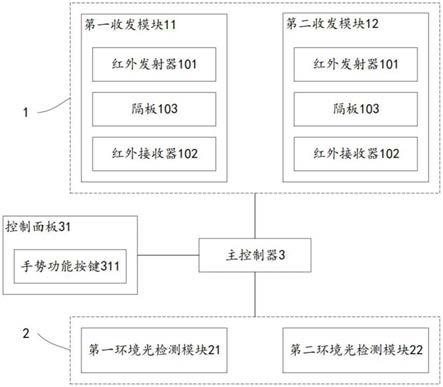
图1是本实用新型实施例中带环境光检测组件的吸油烟机的示意框图;
[0027]
图2是本实用新型实施例中吸油烟机的控制方法的流程图;
[0028]
图3是图2中步骤s2的子流程图。
具体实施方式
[0029]
以下实施例对本实用新型进行说明,但本实用新型并不受这些实施例所限制。对本实用新型的具体实施方式进行修改或者对部分技术特征进行等同替换,而不脱离本实用新型方案的精神,其均应涵盖在本实用新型请求保护的技术方案范围当中。
[0030]
如图1所示,一种带环境光检测组件的吸油烟机,包括吸油烟机机体 (图中未示出)、手势识别装置(图中未示出)和主控制器3,其中手势识别装置包括收发组件1和环境光检测组件2,收发组件1设置于吸油烟机机体上用于发射和接收感应信号,环境光检测组件2设置于吸油烟机机体上用于实时检测环境光线的光照强度。主控制器3设置于吸油烟机机体上且其分别与收发组件1 和环境光检测组件2电性连接,且主控制器3设有用于使吸油烟机进入手势识别判断程序的手势功能按键311,当用户通过开启手势功能按键311来使吸油烟机进入手势识别判断程序时,主控制器3可根据收发组件1接收到感应信号前后的光照强度偏差p,将光照强度偏差p与至少一个参考值进行比较,并基于比较结果来确定是否进行手势识别判断。
[0031]
可见,本实施例的带环境光检测组件的吸油烟机,在手势识别装置上增设环境光检测组件2,并且在主控制器3、环境光检测组件2和收发组件1的配合作用下,根据不同物体遮挡环境光线后,环境光检测组件2检测到的前后光照强度偏差不一样的特性,从而实现大体上判别是否为人手的动作,提升手势识别判断的精准性,有效降低了非人手的物体被误判为手势功能的概率,减少吸油烟机误触发的风险,提升产品的可靠性。
[0032]
进一步地,主控制器3设有控制面板31,控制面板31设置于吸油烟机机体上。环境光检测组件2包括分别与主控制器3电性连接的第一环境光检测模块21和第二环境光检测模块22,第一环境光检测模块21和第二环境光检测模块22分别设置于吸油烟机机体上并位于控制面板31的相对两侧。由此,通过在控制面板31的相对两侧分别设置第一环境光检测模块21和第二环境光检测模块22,并且通过第一环境光检测模块21与原有收发组件1、第二环境光检测模块22与原有收发组件1的配合下,可实现实时检测是否有物体经过第一环境光检测模块21和第二环境光检测模块22,主控制器3可至少根据两者的检测结果来确定手势动作的移动方向。
[0033]
进一步地,控制面板31包括设置于吸油烟机机体正面的显示模块(图中未示出)和按键操作模块(图中未示出),在按键操作模块上设有手势功能按键311。在用户开启手势功能按键311后,主控制器3可通过第一环境光检测模块21获取收发组件1接收到感应信号前后的环境光照强度l
环境
和当前光照强 l
当前
,并根据当前光照强度l
当前
和环境光照强度l
环境
计算光照强度偏差p;还可以根据通过第二环境光检测模块22获取收发组件1接收到感应信号前后的环境光照强度l
环境
和当前光照强l
当前
,并根据当前光照强度l
当前
和环境光照强度 l
环境
计算光照强度偏差p。由此,通过第一环境光检测模块21和/或第二环境光检测模块22l来辅助判断物体的类别,有效降低了收发组件1对手势识别的误判,提升产品的可靠性。
[0034]
如图1所示,进一步地,收发组件1包括分别与主控制器3电性连接的第一收发模块11和第二收发模块12,第一收发模块11设置于吸油烟机机体上并靠近于第一环境光检测模
块21布置,第二收发模块12设置于吸油烟机机体上并靠近于第二环境光检测模块22布置。由此,第一收发模块11和第一环境光检测模块21共同构成左手势识别装置,第二收发模块12和第二环境光检测模块22共同构成右手势识别装置,并且左手势识别装置和右手势识别装置均能够根据检测到的前后光照强度偏差不一样的特性,大体上判别是否为人手的动作,降低了非人手的物体被误判为手势功能的概率,提升产品的可靠性。
[0035]
具体地,第一收发模块11包括红外发射器101、红外接收器102和隔板103,红外发射器101和红外接收器102间隔并排布置,且红外发射器101和红外接收器102分别与主控制器3电性连接,隔板103设置于红外发射器101 和红外接收器102之间,以防止红外接收器102受到红外发射器101的干扰,利于提高红外接收器102接收到感应信号(即红外反射光信号)的检测精准度。
[0036]
同理,第二收发模块12包括红外发射器101、红外接收器102和隔板 103,红外发射器101和红外接收器102间隔并排布置,且红外发射器101和红外接收器102分别与主控制器3电性连接,隔板103设置于红外发射器101和红外接收器102之间。
[0037]
如图2所示,本实施例还提供了一种吸油烟机的控制方法,其应用如上所述的一种带环境光检测组件的吸油烟机,所述控制方法包括步骤:
[0038]
s1:进入手势识别判断程序;
[0039]
具体地,主控制器3设有手势功能按键311,主控制器3通过持续判断用户是否开启手势功能按键311来确定是否进入手势识别判断程序,如果用户开启手势功能按键311,则吸油烟机开始进入手势识别判断程序。
[0040]
s2:获取收发组件1接收到感应信号前后的环境光照强度l
环境
和当前光照强l
当前
;
[0041]
具体地,第一环境光检测模块21获取第一收发模块11接收到感应信号前后的环境光照强度l
环境
和当前光照强l
当前
,并将检测到数据反馈至主控制器3;与之同时,第二环境光检测模块22获取第二收发模块12接收到感应信号前后的环境光照强度l
环境
和当前光照强l
当前
,并将检测到数据反馈至主控制器3。
[0042]
s3:根据当前光照强度l
当前
和环境光照强度l
环境
计算光照强度偏差p;
[0043]
具体地,主控制器3根据第一环境光检测模块21所获取的当前光照强度l
当前
和环境光照强度l
环境
,计算物体经过第一环境光检测模块21前后的光照强度偏差p;并且主控制器3根据第二环境光检测模块22所获取的当前光照强度l
当前
和环境光照强度l
环境
,计算物体经过第二环境光检测模块22前后的光照强度偏差p。
[0044]
s4:将计算所得的光照强度偏差p与至少一个参考值进行比较,并基于比较结果来确定是否进行手势识别判断。
[0045]
具体地,主控制器3将物体经过第一环境光检测模块21前后的光照强度偏差p与至少一个参考值进行比较,并基于比较结果来确定是否进行手势识别判断;并且主控制器3将物体经过第二环境光检测模块22前后的光照强度偏差p与至少一个参考值进行比较,并基于比较结果来确定是否进行手势识别判断。
[0046]
可见,通过检测并判断物体经过第一环境光检测模块21前后的光照强度偏差p与至少一个参考值的大小关系,并且通过检测并判断物体经过第二环境光检测模块22前后的光照强度偏差p与至少一个参考值的大小关系,实现了大体上判别经过第一环境光检测模块21和/或第二环境光检测模块22的物体是否为人手的动作,提升手势识别判断的精准性,
有效降低了非人手的物体被误判为手势功能的概率,提升产品的可靠性。
[0047]
如图3所示,优选地,在步骤s2中,获取收发组件1接收到感应信号前后的环境光照强度l
环境
和当前光照强l
当前
,其包括:
[0048]
s21:通过环境光检测组件2获取环境光照强度l
环境
;
[0049]
具体地,第一环境光检测模块21实时检测其周边的环境光照强度l
环境
,并实时检测到的数据发送并存储于主控制器3。第二环境光检测模块22实时检测其周边的环境光照强度l
环境
,并实时检测到的数据发送并存储于主控制器3。
[0050]
s22:判断收发组件1是否接收到感应信号,如是则进入下一步,如否返回上一步;
[0051]
具体地,第一收发模块11持续检测是否接收到感应信号(即红外反射光信号),如是则确定有物体经过第一收发模块11和第一环境光检测模块21 并进入步骤s23,如否则返回上一步进行环境光照强度,并将最新检测到的环境光照强度l
环境
存储于主控制器3中,以替换上一次存储的环境光照强度l
环境
,从而保证环境光照强度l
环境
数据本身的有效性和准确性,进而利于提高光照强度偏差p的计算结果准确性,进一步降低手势识别判断的误判概率,提升产品的可靠性。
[0052]
与之同时,第二收发模块12持续检测是否接收到感应信号(即红外反射光信号),如是则确定有物体经过第二收发模块12和第二环境光检测模块 22进入步骤s23,如否则返回上一步进行环境光照强度,并将最新检测到的环境光照强度l
环境
存储于主控制器3中,以替换上一次存储的环境光照强度l
环境
。
[0053]
s23:获取收发组件1接收到感应信号时的当前光照强度l
当前
。
[0054]
具体地,如果第一收发模块11检测到红外反射光信号时,主控制器3 通过第一环境光检测模块21获取第二收发模块12接收到感应信号时的当前光照强度l
当前
,从而得到物体经过第一环境光检测模块21前后,即第一收发模块 11接收到感应信号前后的环境光照强度l
环境
和当前光照强l
当前
。
[0055]
同理,如果第二收发模块12检测到红外反射光信号时,主控制器3 通过第二环境光检测模块22获取第二收发模块12接收到感应信号时的当前光照强度l
当前
,从而得到物体经过第二收发模块12前后,即第二收发模块12接收到感应信号前后的环境光照强度l
环境
和当前光照强l
当前
。
[0056]
优选地,在步骤s3中,光照强度偏差p,其通过如下公式计算所得: p=(l
环境-l
当前
)/l
环境
。
[0057]
进一步地,在步骤s4中,至少一个参考值包括pmin和pmax,如果光照强度偏差p∈[pmin,pmax],则确定经过第一收发模块11或第二收发模块12 的物体为人手,符合人手的光照强度变化,进行手势识别判断,并在完成本次手势识别判断之后返回步骤s2,以进行新的检测循环流程。如果光照强度偏差 p<pmin或者光照强度偏差p>pmax,则确定经过第一收发模块11或第二收发模块12的物体为干扰物,不属于人手,此时直接返回步骤s2不进行手势识别判断,以避免引发吸油烟机误触发的风险。由此,通过主控制器3判断物体经过检测区域前后的光照强度偏差p是否在预设范围pmin~pmax以内,从而实现了识别是否为人手经过检测区域,降低了非人手的物体被误判为手势功能的概率,提升手势识别判断的精准性和产品的可靠性,提升用户体验。
[0058]
以上所述的仅是本实用新型的一些实施方式。对于本领域的普通技术人员来说,
在不脱离本实用新型创造构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1