一种智能化集成灶
1.本发明涉及集成灶技术领域,尤其涉及一种智能化集成灶。
背景技术:
2.集成灶是一种集吸油烟机、燃气灶、消毒柜、储藏柜等多种功能于一体的厨房电器,行业里亦称作环保灶或集成环保灶;具有节省空间、抽油烟效果好,节能低耗环保等优点;一般的集成灶吸油率达到95%,油烟吸净率越高,质量越好,有些品牌集成灶油烟吸净率达到了99.95%的极限指标;
3.集成灶在使用时,使用者可通过烹饪菜品产生的油烟对集成灶上的吸油烟机的吸油烟的风力等级进行调节,使用者在对菜品进行烹饪时还需要空出手来对集成灶进行控制,才能够对吸油烟的风力等级进行调节,给使用者造成使用不便,降低了集成灶的智能化程度。
技术实现要素:
4.基于现有的集成灶在使用时,需要使用者空出手来对集成灶进行控制,才能够对吸油烟的风力等级进行调节,给使用者造成使用不便,降低了集成灶的智能化程度的技术问题,本发明提出了一种智能化集成灶。
5.本发明提出的一种智能化集成灶,包括吸油烟机、燃气灶、消毒柜、储藏柜、状态监测装置和目标识别控制模块,所述状态监测装置设置于所述吸油烟机上端的下表面,所述状态监测装置包括监测探头,所述状态监测装置用于对烹饪时的菜品以及产生的油烟进行监测,所述目标识别控制模块通过所述状态监测装置的监测数据进行分析和计算,进而对吸油烟机的风力等级进行调节;
6.所述状态监测装置包括开设于所述吸油烟机上端下表面的监测腔,所述监测腔的两端内壁均开设有第一连通口,其中一个所述第一连通口的一端内壁开设有安装口,所述安装口的内壁固定安装有驱动电机,所述驱动电机的主轴端通过轴承与两个所述第一连通口的内壁固定连接;
7.所述目标识别控制模块包括菜品识别模块、控制模块、计算模块和对比模块,所述菜品识别模块包括菜品数据库,所述菜品识别模块通过状态监测装置内的监测探头对烹饪的菜品进行特征提取,将菜品的提取特征传输至所述菜品数据库内进行菜品识别,将识别的菜品烹饪数据进行调取,通过控制模块根据烹饪数据控制吸油烟机的风力调节。
8.优选地,所述监测腔的两端内壁均开设有环形滑槽,所述监测腔的内壁设置有安装辊,所述安装辊活动套接于所述驱动电机的主轴表面,所述安装辊的两端表面均固定连接有滑环,两个所述滑环的外表面分别与两个所述环形滑槽的内壁活动套接。
9.优选地,所述安装辊的内壁开设有驱动腔,所述驱动腔的内壁固定套接有两个对称分布的卡接齿环,所述驱动电机的主轴位于所述驱动腔内部的外表面固定套接有两个对称分布的卡接齿轮,两个所述卡接齿轮分别与两个所述卡接齿环相互卡接。
10.优选地,所述安装辊的周侧面分别固定连接有第一安装块和第二安装块,所述第一安装块的下表面开设有连接口,所述监测探头固定安装于所述连接口的内壁,所述监测腔的两端内壁均开设有导向滑槽,所述导向滑槽的两端内壁均固定连接有限位开关。
11.优选地,所述第二安装块的一端通过轴承固定连接有连接杆,所述连接杆的中部外表面活动套接有铰接座,两个所述铰接座的一端表面固定连接有密封软板,所述密封软板的一侧表面固定连接有防水橡胶板,所述密封软板的两端外表面分别与两个所述导向滑槽的内壁滑动插接。
12.优选地,所述计算模块对监测探头对烹饪菜品时的油烟数值进行检测,并将检测的数值传输至所述对比模块内进行对比,所述监测探头的每个监测时间为t,所述监测探头观察到菜品烹饪时的一个状态s
t
∈s,通过所述监测探头选择一个菜品烹饪时吸油烟机的一个吸油烟的动作a
t
∈a,通过所述控制模块产生一个对吸油烟机的吸力调节s
t+1
∈s,所述监测探头对菜品烹饪时吸油烟机工作的状态下对油烟进行监测得到的值传输至所述对比模块内进行对比,进而得到一个瞬时奖赏:
13.r
t
=r(s
t
,a
t
,s
t+1
)∈r;
14.s和a分别为状态空间和动作空间,相应地,r(s,a,s
′
)被称为瞬时奖赏函数;
15.菜品烹饪时吸油烟机的初始状态s1,是从吸油烟机在对菜品烹饪时的初始吸力的概率分布中确定的,此时状态空间s分为离散的和连续的;
16.若状态空间s是离散型的,即初始的概率分布由概率质量函数p(s)确定,且满足:
[0017][0018][0019]
优选地,若状态空间s是连续型的,即初始的概率分布由概率密度函数p(s)确定,且满足:
[0020][0021]
∫
s∈s
p(s)ds=1;
[0022]
由于概率质量函数可以使用狄克拉函数δ(s)和概率密度函数表达:
[0023][0024]
优选地,当所述监测探头在菜品烹饪时监测的油烟值低于指定数值,及吸油烟机的运行处于连续状态空间时,环境的动态性被表示为当采用动作a时,从状态s到状态s
′
的转移概率,其通过给定条件概率密度p(s
′
|s,a)下的转移概率分布来表达:
[0025][0026][0027]
用策略π确定吸油烟机的决策,将策略可以作为状态的函数:
[0028][0029]
优选地,动作a既可以是离散的,也可以是连续的,在本吸油烟机中,采用随机策略,在随机策略中,每个状态采用的动作是概率所确定的,看做是状态s采用动作a的条件概
率密度:
[0030][0031][0032]
通过引入动作选择的随机性,使得使控制模块更主动的对吸油烟机的风力进行调节,当动作a是离散型时,与表达的状态密度类似。
[0033]
优选地,以概率p(s)选择吸油烟机的初始状态s1;
[0034]
对于t=1,2...t;
[0035]
(a)、以策略π(a
t
丨s
t
)选择动作a
t
;
[0036]
(b)、根据转移概率p(s
t+1
丨s
t
,a
t
),确定下一个状态s
t+1
;
[0037]
通过上述表述的过程,得到菜品烹饪时的一个状态和菜品烹饪时吸油烟机的一个吸油烟的动作的序列。
[0038]
本发明中的有益效果为:
[0039]
1、通过设置状态监测装置,通过驱动电机带动卡接齿轮进行旋转,进而带动套接在驱动腔内部的卡接齿环进行旋转,带动安装辊进行旋转,在安装辊旋转时,带动第一安装块和第二安装块进行旋转,第一安装块带动监测探头进行偏转,带动监测探头从水平状态偏转至垂直状态,同时,第二安装块通过铰接座带动密封软板在导向滑槽的导向和限位下进行滑动,使得密封软板移动至驱动腔的一侧,进而将驱动腔打开,使得监测探头通过驱动腔打开的开口对集成灶进行监测的效果,增加集成灶的智能化程度。
[0040]
2、通过设置目标识别控制模块,使得菜品识别模块通过状态监测装置内的监测探头对菜品在烹饪时对集成灶的监测,将监测的数据传输至菜品数据库内进行菜品识别,将识别的菜品烹饪数据进行调取,计算模块通过监测探头监测得到的数据进行计算,并通过控制模块根据烹饪数据控制吸油烟机的风力调节。
附图说明
[0041]
图1为本发明提出的一种智能化集成灶的示意图;
[0042]
图2为本发明提出的一种智能化集成灶的立体图;
[0043]
图3为本发明提出的一种智能化集成灶的监测腔结构剖视图;
[0044]
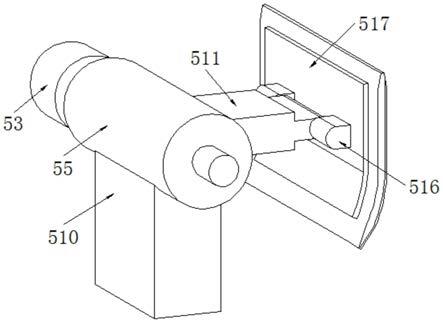
图4为本发明提出的一种智能化集成灶的第一安装块结构剖视图;
[0045]
图5为本发明提出的一种智能化集成灶的状态监测装置爆炸图;
[0046]
图6为本发明提出的一种智能化集成灶的图4中a处结构放大图;
[0047]
图7为本发明提出的一种智能化集成灶的系统框图。
[0048]
图中:1、吸油烟机;11、监测探头;2、燃气灶;3、消毒柜;4、储藏柜;5、监测腔;51、第一连通口;52、安装口;53、驱动电机;54、环形滑槽;55、安装辊;56、滑环;57、驱动腔;58、卡接齿环;59、卡接齿轮;510、第一安装块;511、第二安装块;512、连接口;513、导向滑槽;514、限位开关;515、连接杆;516、铰接座;517、密封软板;518、防水橡胶板;6、菜品识别模块;61、控制模块;62、计算模块;63、对比模块;64、目标识别控制模块。
具体实施方式
[0049]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0050]
参照图1-7,一种智能化集成灶,包括吸油烟机1、燃气灶2、消毒柜3、储藏柜4、状态监测装置和目标识别控制模块64,状态监测装置设置于吸油烟机1上端的下表面,状态监测装置包括监测探头11,状态监测装置用于对烹饪时的菜品以及产生的油烟进行监测,目标识别控制模块64通过状态监测装置的监测数据进行分析和计算,进而对吸油烟机1的风力等级进行调节。
[0051]
状态监测装置包括开设于吸油烟机1上端下表面的监测腔5,监测腔5的两端内壁均开设有第一连通口51,为了将驱动电机53安装在监测腔5内,将其中一个第一连通口51的一端内壁开设有安装口52,进一步的,在安装口52的内壁固定安装有驱动电机53,进一步的,在驱动电机53的主轴端通过轴承与两个第一连通口51的内壁固定连接。
[0052]
为了将安装辊55安装在监测腔5内,在监测腔5的两端内壁均开设有内壁呈t形结构的环形滑槽54,进一步的,在监测腔5的内壁设置有安装辊55,进一步的,在安装辊55活动套接于驱动电机53的主轴表面,并在安装辊55的两端表面均固定连接有横截面呈t形结构的滑环56,并使两个滑环56的外表面分别与两个环形滑槽54的内壁活动套接,进而通过滑环56与环形滑槽54的套接将安装辊55进行安装在监测腔5内的效果。
[0053]
为了更好的将驱动电机57的主轴与安装辊55之间进行连接,在安装辊55的内壁开设有驱动腔57,并在驱动腔57的内壁固定套接有两个对称分布的卡接齿环58,进一步的,在驱动电机53的主轴位于驱动腔57内部的外表面固定套接有两个对称分布的卡接齿轮59,进一步的,使两个卡接齿轮59分别与两个卡接齿环58相互卡接,通过卡接齿轮58与卡接齿环58的卡接,使得卡接齿轮58在旋转时带动卡接齿环58进行旋转,进而带动安装辊55进行旋转,通过两个卡接齿轮59能够更好的对安装辊55进行驱动的效果。
[0054]
为了通过安装辊55的旋转带动第一安装块510和第二安装块511进行旋转,在安装辊55的周侧面分别固定连接有第一安装块510和第二安装块511,为了对监测探头11进行安装,在第一安装块510的下表面开设有连接口512,进一步的,将监测探头11固定安装于连接口512的内壁,为了对密封软板517进行导向,在监测腔5的两端内壁均开设有导向滑槽513,为了控制密封软板517在打开或关闭时对驱动电机53进行控制,在导向滑槽513的两端内壁均固定连接有限位开关514,当密封软板517的一端移动至导向滑槽513的一端时,将限位开关514进行按下,使得驱动电机53停止的效果。
[0055]
为了对第二安装块511与密封软板517之间进行连接,在第二安装块511的一端通过轴承固定连接有连接杆515,进一步的,在连接杆515的中部外表面活动套接有铰接座516,使得在两个铰接座516的一端表面固定连接有密封软板517,为了对密封软板517进行防水,在密封软板517的一侧表面固定连接有防水橡胶板518,并使密封软板517的两端外表面分别与两个导向滑槽513的内壁滑动插接,使得第二安装块511的旋转带动密封软板517在导向滑槽513内滑动,通过导向滑槽513对密封软板517进行导向,并通过防水橡胶板518对密封软板517进行防护的效果。
[0056]
通过设置状态监测装置,通过驱动电机53带动卡接齿轮59进行旋转,进而带动套接在驱动腔57内部的卡接齿环58进行旋转,带动安装辊55进行旋转,在安装辊55旋转时,带
动第一安装块510和第二安装块511进行旋转,第一安装块510带动监测探头11进行偏转,带动监测探头11从水平状态偏转至垂直状态,同时,第二安装块511通过铰接座516带动密封软板517在导向滑槽513的导向和限位下进行滑动,使得密封软板517移动至驱动腔57的一侧,进而将驱动腔57打开,使得监测探头11通过驱动腔57打开的开口对集成灶进行监测的效果,增加集成灶的智能化程度;
[0057]
目标识别控制模块64包括菜品识别模块6、控制模块61、计算模块62和对比模块63,菜品识别模块6包括菜品数据库,菜品识别模块6通过状态监测装置内的监测探头11对烹饪的菜品进行特征提取,将菜品的提取特征传输至菜品数据库内进行菜品识别,将识别的菜品烹饪数据进行调取,通过控制模块61根据烹饪数据控制吸油烟机1的风力调节;
[0058]
计算模块62对监测探头11对烹饪菜品时的油烟数值进行检测,并将检测的数值传输至对比模块63内进行对比,监测探头11的每个监测时间为t,监测探头11观察到菜品烹饪时的一个状态s
t
∈s,通过监测探头11选择一个菜品烹饪时吸油烟机1的一个吸油烟的动作a
t
∈a,通过控制模块61产生一个对吸油烟机1的吸力调节s
t+1
∈s,监测探头11对菜品烹饪时吸油烟机1工作的状态下对油烟进行监测得到的值传输至对比模块63内进行对比,进而得到一个瞬时奖赏:
[0059]rt
=r(s
t
,a
t
,s
t+1
)∈r;
[0060]
s和a分别为状态空间和动作空间,相应地,r(s,a,s
′
)被称为瞬时奖赏函数;
[0061]
菜品烹饪时吸油烟机1的初始状态s1,是从吸油烟机1在对菜品烹饪时的初始吸力的概率分布中确定的,此时状态空间s分为离散的和连续的;
[0062]
若状态空间s是离散型的,即初始的概率分布由概率质量函数p(s)确定,且满足:
[0063][0064][0065]
若状态空间s是连续型的,即初始的概率分布由概率密度函数p(s)确定,且满足:
[0066][0067]
∫
s∈s
p(s)ds=1;
[0068]
由于概率质量函数可以使用狄克拉函数δ(s)和概率密度函数表达:
[0069][0070]
当监测探头11在菜品烹饪时监测的油烟值低于指定数值,及吸油烟机1的运行处于连续状态空间时,环境的动态性被表示为当采用动作a时,从状态s到状态s
′
的转移概率,其通过给定条件概率密度p(s
′
|s,a)下的转移概率分布来表达:
[0071][0072][0073]
用策略π确定吸油烟机1的决策,将策略可以作为状态的函数:
[0074][0075]
动作a既可以是离散的,也可以是连续的,在本吸油烟机1中,采用随机策略,在随
机策略中,每个状态采用的动作是概率所确定的,看做是状态s采用动作a的条件概率密度:
[0076][0077][0078]
通过引入动作选择的随机性,使得使控制模块61更主动的对吸油烟机1的风力进行调节,当动作a是离散型时,与表达的状态密度类似;
[0079]
以概率p(s)选择吸油烟机1的初始状态s1;
[0080]
对于t=1,2...t;
[0081]
a、以策略π(a
t
丨s
t
)选择动作a
t
;
[0082]
b、根据转移概率p(s
t+1
丨s
t
,a
t
),确定下一个状态s
t+1
;
[0083]
通过上述表述的过程,得到菜品烹饪时的一个状态和菜品烹饪时吸油烟机1的一个吸油烟的动作的序列。
[0084]
通过设置目标识别控制模块64,使得菜品识别模块6通过状态监测装置内的监测探头11对菜品在烹饪时对集成灶的监测,将监测的数据传输至菜品数据库内进行菜品识别,将识别的菜品烹饪数据进行调取,计算模块通过监测探头11监测得到的数据进行计算,并通过控制模块61根据烹饪数据控制吸油烟机1的风力调节。
[0085]
工作原理:当集成灶启动时,状态监测装置同时启动,通过驱动电机53带动卡接齿轮59进行旋转,通过在卡接齿轮59的主轴上添加两个卡接齿轮59,使得卡接齿轮59能够平稳的对安装辊55进行驱动,卡接齿轮59在旋转时,带动套接在驱动腔57内部的卡接齿环58进行旋转,进而带动安装辊55进行旋转,在安装辊55旋转时,带动第一安装块510和第二安装块511进行旋转,第一安装块510带动监测探头11进行偏转,带动监测探头11从水平状态偏转至垂直状态,同时,第二安装块511通过铰接座516带动密封软板517在导向滑槽513的导向和限位下进行滑动,使得密封软板517移动至驱动腔57的一侧,进而将驱动腔57打开,使得监测探头11通过驱动腔57打开的开口对集成灶进行监测。
[0086]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1