城市固体垃圾就地处理入水口旋转耙子装置的制作方法
城市固体垃圾就地处理入水口旋转耙子装置
所属技术领域:
1.本发明涉及智能制造、环保和资源再利用技术领域,尤其是一种绿色垃圾分类机械自动智能化就地处理技术,是非常安全有效的城市固体垃圾就地处理入水口旋转耙子装置。
背景技术:
2.垃圾处理是国际问题,垃圾中含有超过300种不同物质,其中包含各种有毒有害成分,例如:汞、砷、铅、镉、硌、pcb多氯联苯、pob持久性有机污染物、强酸强碱、石棉等,垃圾处理,不同国家,有不同需求,即便是同一个国家,每个地区的垃圾类型不同,垃圾特性和垃圾量都在不断的变化中,处理方法应有所不同,目前现有的垃圾分类设备,大多为小区内摆放的垃圾分类箱等类似的设备,存在着分类能力弱、分类品种少、分类质量差和无法完成垃圾分类规模化和无害化处理的现实问题,为了克服这个缺陷,我们发明创造了一种工业自动化人工智能垃圾水洗无害化分类成套装置(专利号:zl 2013 2 0622326.9;实用新型名称:城市固体垃圾处理装置;国别:中国;授权公告日:2014年3月26日),根据人口规模产生的垃圾量,该成套装置规模可大可小,就地安装运行,该装置将来自垃圾中的废气净化至清洁空气标准,将垃圾无害化后分类和清洗至商业可接受的标准,将垃圾分离、回收和包装至商业可接受的标准,去除或封装几乎所有污染物、有毒有害成分,提供安全可控的垃圾分类产品,该装置生产的产品是干净的或比原来可重复使用的材料更加干净,该装置的产品标准足以超过国际材料或产品供应标准,为了进一步细化上述装置,本发明提供了一种城市固体垃圾就地处理入水口旋转耙子装置。
技术实现要素:
3.1.城市固体垃圾处理装置(专利号:zl 2013 2 0622326.9;实用新型名称:城市固体垃圾处理装置;国别:中国;授权公告日:2014年3月26日),它是一种垃圾分类无害化就地处理中心,是水洗固体废物分选厂,为了进一步增强上述装置的性能,本发明供了一种城市固体垃圾就地处理入水口旋转耙子装置,它的用途:(1)可以是城市固体垃圾处理装置的组成部分,这里提到城市固体垃圾处理装置,在实用新型专利(专利号:zl 2013 2 0622326.9;实用新型名称:城市固体垃圾处理装置;国别:中国;授权公告日:2014年3月26日)中做了具体的描述。(2)可以是完全独立的装置。(3)可以用于现有垃圾焚烧发电厂和垃圾处理厂垃圾处理添加设备(4)可以用于现有垃圾填埋场垃圾处理的添加设备,对现有堆积的垃圾进行无害化处理分类。
4.2.本发明是这样实现的,它包括城市固体垃圾就地处理入水口旋转耙子装置,其特征是在城市固体垃圾处理装置(专利号:zl 2013 2 0622326.9)的基础上,进一步细化上述装置,它是安全的且适用于任何垃圾处理场所,为优化垃圾管理提供技术支持,其特点是根据场地的具体要求,根据人口数量,垃圾处理规模可大可小。本发明一种城市固体垃圾就地处理入水口旋转耙子装置,其特征是:该装置是城市固体垃圾就地处理卸载入水口装置
的组成部分,是可以自由旋转进入水浴槽的耙子,是组合的不同长度的自由旋转耙子,入水口旋转耙子9上的金属板条将废物推动并撕裂开,逐步撕裂袋和推动废物通过水浴槽2,该装置包括旋转耙子摇动连接梁84,旋转耙子推动连接梁85,旋转耙子刮擦连接梁86,旋转耙子破裂连接梁87,齿轮88,旋转耙子摇动杆89,旋转耙子推动杆90,旋转耙子刮擦杆91,旋转耙子破裂杆92,在垃圾进入水浴槽2之前,垃圾清运车停靠点与卸载舱处的入水口装置相连,大口网格6的一端倚靠在背板8上,大口网格6在条形网格7的上方,条形网格7的一端搭在背板8上,旋转耙子9由螺栓固定在水浴槽2和背板8上,入水口装置与水浴槽2相连接,旋转耙子9是由不同长度的刷子和多个轴承部件组成,且自由旋转,旋转耙子9的刷子通过条形网格7和背板8,且网格材料粗糙,大口网格6位于旋转耙子9的上方,旋转耙子9材料粗糙,卸载舱1处的入水口气体探测器79由螺栓固定在背板8上,人工智能监测器82与入水口气体探测器79通过线路连接,人工智能监测器82与旋转耙子9的电动机通过线路连接。旋转耙子摇动杆89,旋转耙子推动杆90,旋转耙子刮擦杆91,旋转耙子破裂杆92分别以焊接的方式与旋转耙子9相连接。旋转耙子推动连接梁85以焊接的方式分别与旋转耙子摇动杆89和旋转耙子推动杆90相连接。旋转耙子刮擦连接梁86以焊接的方式分别与旋转耙子推动杆90和旋转耙子刮擦杆91相连接。旋转耙子破裂连接梁87以焊接的方式分别与旋转耙子刮擦杆91和旋转耙子破裂杆92相连接。旋转耙子摇动连接梁84以焊接的方式分别与旋转耙子摇动杆89和旋转耙子破裂杆92相连接。齿轮88以紧咬的方式与旋转耙子9相连接。通过齿轮88降低旋转耙子9的旋转速度。卸载入水口装置第一阶段,是把将要进入城市固体垃圾处理装置的垃圾,通过大口网格6的筛网,将尺寸大的废物分离出来。卸载入水口装置第二阶段,是把将要进入城市固体垃圾处理装置的垃圾,通过条形网格7的筛网,将尺寸小的废物分离出来。卸载入水口装置第三阶段是旋转耙子9把入水口处的垃圾撕扯并推入条形网格7和水浴槽2,旋转耙子9的刷子是长短不一的且自由旋转的,旋转耙子9自由旋转进入水浴槽2,这里设有背板8,防止废物垃圾绕过城市垃圾处理装置入水口,背板8与旋转耙子9相连接。
5.3.本发明的有益效果是,提供了一个绿色生态技术,将废物变成资源,同时保护可贵的土地资源,减少垃圾管理上长期对填埋场和焚化炉的依赖,降低对土壤和空气的污染,解决垃圾远途运输和管理填埋厂的烦恼,实现经济收益,更为社会的可持续发展,提供了行之有效的科学方法,为创造优美清洁的环境,带来无限的益处。
附图说明:
6.下面结合附图对本发明进一步说明。
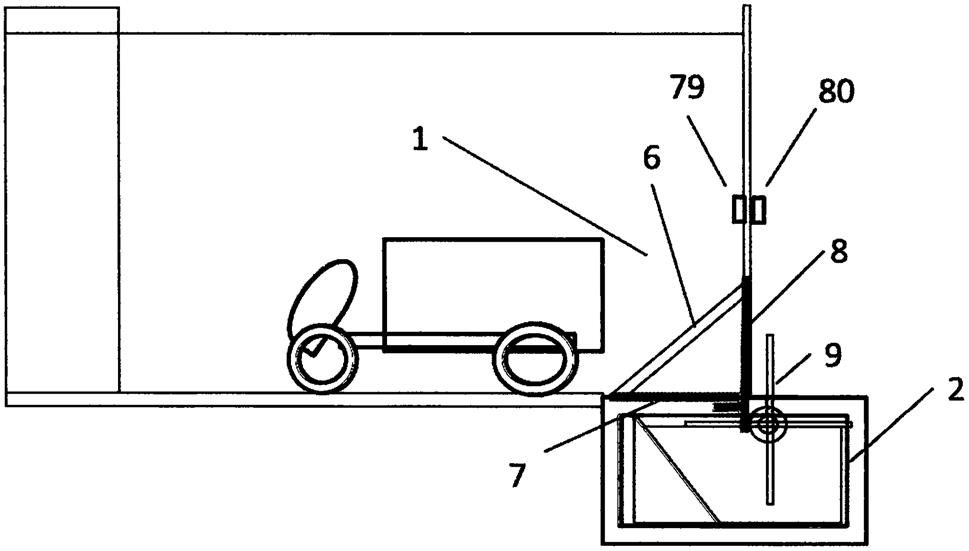
7.图1是本发明的城市固体垃圾就地处理卸载入水口装置侧视图。
8.图2是本发明的城市固体垃圾就地处理入水口旋转耙子装置正视图和侧视图。
9.图3是本发明的城市固体垃圾就地处理入水口旋转耙子装置部件后视图和端视图。
10.图4是本发明的城市固体垃圾就地处理入水口旋转耙子装置后视图和端视图。
11.图5是本发明的城市固体垃圾就地处理装置俯视图。
12.图6是本发明的城市固体垃圾就地处理装置内部端视图。
13.图中,1-卸载舱,2-水浴槽,3-低速传送带,4-分拣装置,5-容器箱,6-大口网格,7-条形网格,8-背板,9-旋转耙子,19-水浴刮运机,79-入水口气体探测器,80-水浴槽气体探
测器,82-人工智能监测器,84-旋转耙子摇动连接梁,85-旋转耙子推动连接梁,86-旋转耙子刮擦连接梁,87-旋转耙子破裂连接梁,88-齿轮,89-旋转耙子摇动杆,90-旋转耙子推动杆,91-旋转耙子刮擦杆,92-旋转耙子破裂杆,94-粗砂仓,95-肥料仓,96-混合仓,97-龙门起重机
具体实施方式:
14.如图1,5,6所示,从卸载舱1处排放的固体废物进入到不同的分拣、撕裂和浸泡系统,这些系统是城市固体垃圾就地处理卸载入水口装置的一部分。然后废物被转移到水浴槽2中。在分拣装置4对固体废物进行分类。
15.如图1,3所示,在垃圾进入水浴槽2之前,垃圾清运车停靠点与卸载舱处的入水口装置相连,大口网格6的一端倚靠在背板8上,大口网格6在条形网格7的上方,条形网格7的一端搭在背板8上,旋转耙子9由螺栓固定在水浴槽2和背板8上,入水口装置与水浴槽2相连接,旋转耙子9是由不同长度的刷子和多个轴承部件组成,且自由旋转,旋转耙子9的刷子通过条形网格7和背板8,且网格材料粗糙,大口网格6位于旋转耙子9的上方,旋转耙子9材料粗糙,卸载舱1处的入水口气体探测器79由螺栓固定在背板8上,人工智能监测器82与入水口气体探测器79通过线路连接,人工智能监测器82与旋转耙子9的电动机通过线路连接。
16.如图1,6所示,防止过大的,笨重的易回收的干燥物料进入分拣系统,这里把将要进入城市固体垃圾处理装置的垃圾,通过大口网格6的筛网,将尺寸大了废物分离出来。
17.如图1,6所示,是把将要进入城市固体垃圾处理装置的垃圾,通过条形网格7的筛网,将尺寸小的废物分离出来。
18.如图2,3,4所示,是把入水口处的垃圾用旋转耙子9撕扯并推入条形网格7,这里设有背板8,防止废物垃圾绕过城市垃圾处理装置入水口,背板8与旋转耙子9相连接,旋转耙子9自由旋转进入水浴槽2,旋转耙子9是由不同长度的刷子组合且自由旋转,逐渐撕开袋子并将废物推到水浴槽2。
19.如图4所示,旋转耙子摇动杆89,旋转耙子推动杆90,旋转耙子刮擦杆91,旋转耙子破裂杆92分别以焊接的方式与旋转耙子9相连接。
20.如图4所示,旋转耙子推动连接梁85以焊接的方式分别与旋转耙子摇动杆89和旋转耙子推动杆90相连接。
21.如图4所示,旋转耙子刮擦连接梁86以焊接的方式分别与旋转耙子推动杆90和旋转耙子刮擦杆91相连接。
22.如图4所示,旋转耙子破裂连接梁87以焊接的方式分别与旋转耙子刮擦杆91和旋转耙子破裂杆92相连接。
23.如图4所示,旋转耙子摇动连接梁84以焊接的方式分别与旋转耙子摇动杆89和旋转耙子破裂杆92相连接。
24.如图4所示,齿轮88以紧咬的方式与旋转耙子9相连接。通过齿轮88降低旋转耙子9的旋转速度。
25.如图3所示,突出了城市固体垃圾就地处理入水口旋转耙子9的位置,。
26.如图1所示,城市固体垃圾就地处理卸载入水口设有起重机式抓斗,手动或自动抓起大件物品,将其分离到卸载舱1附近的安全位置。已分类好的干净废物储存在卸载舱1。
27.如图1,2,6所示,大口网格6是粗糙的格栅,可以撕开袋子,限制通过它的废物大小。
28.如图1,5,6所示,旋转耙子9包括刷子,推动废物通过较小的条形网格7到水下的处理系统。
29.如图1,2,4,6所示,条形网格7的格栅间距小于大口网格6的格栅间距。粗糙的网格材料,撕开袋子,网格控制进入的物料尺寸。
30.如图1所示,卸载舱1的入水口气体探测器79,对敏感气体报出警报。
31.如图1,7所示,人工智能监测器82与入水口气体探测器79通过线路连接,人工智能监测器82与旋转耙子9的电动机通过线路连接
32.如图1所示,城市固体垃圾就地处理卸载入水口处,当卡车不卸载废物时,进水口被盖住。
33.如图1,5,6所示,垃圾清运车卸载舱1与水浴槽2相连接,水浴槽2的两端底端与低速传送带3相连接,低速传送带3从水下延伸到水浴槽2以外,低速传送带3位于分拣装置4的旁边,水浴槽2内的飘浮垃圾流向水浴槽2的一端,非飘浮垃圾由刮运机19将其推向水浴槽2的另一端,旋转耙子9由螺栓固定在水浴槽2和背板8上,水浴刮运机19与水浴槽2底部相连,不同的垃圾从水浴槽2的两端由低速传送带3载出到分拣装置4,容器箱5在低速传送带3的一侧,带识别传感器的人工智能自动化机械手臂利用人工智能分选物料投放到容器箱(5)。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1