一种全自动等离子清洗机的制作方法
[0001]
本实用新型涉及一种全自动等离子清洗机,特别涉及一种全自动等离子清洗机。
背景技术:
[0002]
目前很多电子烟生产厂商采用人工操作等离子清洗机进行喷涂plasma,用来增加产品点胶后的粘和强度,此方式具有一定的局限性,极有可能造成产品漏喷,导致产品不良,另外目前采用的方法效率低,为达到所需产量,只能增加操作人员及设备,此问题会极大的影响生产效率,增加企业的额外支出。
技术实现要素:
[0003]
为克服现有技术的不足,本实用新型提供一种全自动等离子清洗机,结构简单、制作容易、实用性强、能提高工作效率保证加工一致性,具体技术方案是,一种全自动等离子清洗机,包括机器护罩、简易调整滑台、等离子清洗机、触摸式显示屏、xy移动平台,机柜、电源开关、机柜内安装开关电源、伺服驱动器、plc可编程逻辑控制器,电磁阀,等离子清洗机选用深圳市普仕曼科技有限公司pr1000a射流型大气低温等离子处理器,其特征在于:等离子清洗机固定于简易调整滑台上,简易调整滑台固定于机器护罩的连接架上,连接架固定于机器护罩内顶端面,触摸式显示屏固定于机器护罩的前端面,xy移动平台的安装板固定于机柜上端面,电源开关固定于机柜侧面,机柜内安装开关电源、伺服驱动器、plc可编程逻辑控制器及电磁阀,分别与简易调整滑台、等离子清洗机、触摸式显示屏、xy移动平台、电源开关气、电连接,机器护罩固定于机柜上端面的安装板上,所述的xy移动平台,包括定位治具、产品保护挡板、导向柱、抬升气缸、y向移动线性模组、x向移动线性模组、左启动按钮、右启动按钮、复位按钮、急停按钮、安装板,y向移动线性模组、x向移动线性模组成立体垂直交叉连接并固定于安装板上,定位治具固定于x向移动线性模组上,使定位治具可沿xy向移动,产品保护挡板通过导向柱固定于定位治具上方,产品保护挡板与抬升气缸连接,使产品保护挡板可在定位治具上方进行上下移动,抬升气缸与机柜内电磁阀连接,左启动按钮、右启动按钮、复位按钮、急停按钮分别固定于安装板上端面前端。
[0004]
y向移动线性模组、x向移动线性模组选用mf10c10-600-c-f0-232线性模组,plc可编程逻辑控制器选用台达公司dvp40es200t控制板,plc可编程逻辑控制器与外电路的连接为,220v交流电源通过开关电源转换成24v直流电源分别给plc可编程逻辑控制器、触摸式显示屏供电,plc可编程逻辑控制器与触摸式显示屏用rs485s数据线连接,plc可编程逻辑控制器的c0端接地、x0端接左启动按钮、x1端接右启动按钮、x2端接急停按钮、x3端接复位按钮、x4端接x向移动线性模组的始端、x5端接x向移动线性模组的报警端、x6端接y向移动线性模组的始端、x7端接y向移动线性模组的报警端、x10端接x向移动线性模组的伺服电机报警端、x11端接x向移动线性模组的伺服电机正转极限端、x12端接x向移动线性模组的伺服电机反转极限端、x13端接y向移动线性模组的伺服电机报警端、x14端接y向移动线性模组正转极限端、x15端接y向移动线性模组反转极限端、x16端接抬升气缸上升到位信号、x17
端接抬升气缸下降到位信号、y0端接x向移动线性模组的伺服电机脉冲端、y1接x向移动线性模组的伺服电机x向移动端、y2端接y向移动线性模组的伺服电机脉冲端、y3端接y向移动线性模组的伺服电机y向移动端、y4端接x向移动线性模组的伺服电机急停端、y5端接x向移动线性模组的伺服电机报警消除端、y6端接y向移动线性模组的伺服电机急停端、y7端接y向移动线性模组的伺服电机报警消除端、y10端接电磁阀左位控制抬升气缸上升、y11端接接电磁阀右位控制抬升气缸下降。
[0005]
本实用新型的有益效果是,结构小巧、制作容易、操作简单、加工精度高、一致性好,减轻操作人员的劳动强度,保障操作人员的人身安全,提高生产效率,提高产品质量。
附图说明
[0006]
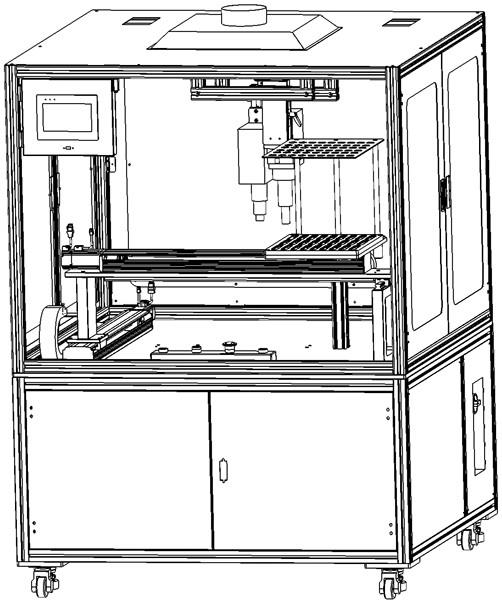
图1是本实用新型的结构示意图;
[0007]
图2是本实用新型的结构爆炸图;
[0008]
图3是本实用新型的xy移动平台结构示意图;
[0009]
图4是本实用新型的plc主板输入端外连电路连接a图;
[0010]
图5是本实用新型的plc主板输入端外连电路连接b图;
[0011]
图6本实用新型的plc主板输出端外连电路连接图。
具体实施方式
[0012]
下面结合附图对本实用新型作进一步说明:
[0013]
如图1、2、3、所示,一种全自动等离子清洗机,包括机器护罩1、简易调整滑台2、等离子清洗机3、触摸式显示屏4、xy移动平台5,机柜6、电源开关7、机柜6内安装开关电源、伺服驱动器、plc可编程逻辑控制器、电磁阀等元器件,等离子清洗机3选用深圳市普仕曼科技有限公司pr1000a射流型大气低温等离子处理器,
[0014]
等离子清洗机3固定于简易调整滑台2上,简易调整滑台2固定于机器护罩1的连接架1-1上,连接架1-1固定于机器护罩1内顶端面,触摸式显示屏4固定于机器护罩1的前端面,xy移动平台5的安装板5-10固定于机柜6上端面,电源开关7固定于机柜6侧面,机柜6内安装开关电源、伺服驱动器、plc可编程逻辑控制器及电磁阀等元器件,分别与简易调整滑台2、等离子清洗机3、触摸式显示屏4、xy移动平台5、电源开关7,气、电连接,机器护罩1固定于机柜6上端面的安装板5-10上,所述的xy移动平台5,包括定位治具5-1、产品保护挡板5-2、导向柱5-3、抬升气缸5-4、y向移动线性模组5-5、x向移动线性模组5-6、左启动按钮5-7-1、右启动按钮5-7-2、复位按钮5-8、急停按钮5-9、安装板5-10,y向移动线性模组5-5、x向移动线性模组5-6成立体垂直交叉连接并固定于安装板5-10上,定位治具5-1固定于x向移动线性模组5-6上,使定位治具5-1可沿xy向移动,产品保护挡板5-2通过导向柱5-3固定于定位治具5-1上方,产品保护挡板5-2与抬升气缸5-4连接,使产品保护挡板5-2可在定位治具5-1上方进行上下移动,抬升气缸5-4与机柜6内电磁阀连接,左启动按钮5-7-1、右启动按钮5-7-2、复位按钮5-8、急停按钮5-9分别固定于安装板5-10上端面前端。
[0015]
如图4、图5、图6所示,y向移动线性模组5-5、x向移动线性模组5-6选用mf10c10-600-c-f0-232线性模组,plc可编程逻辑控制器选用台达公司dvp40es200t控制板,plc可编程逻辑控制器与外电路的连接为,220v交流电源通过开关电源转换成24v直流电源分别给
plc可编程逻辑控制器、触摸式显示屏6供电,plc与触摸式显示屏4用rs485s数据线连接, plc可编程逻辑控制器的c0端接地、x0端接左启动按钮5-7-1、x1端接右启动按钮5-7-2、x2端接急停按钮5-9、x3端接复位按钮5-8、x4端接x向移动线性模组5-6的始端、x5端接x向移动线性模组5-6的报警端、x6端接y向移动线性模组5-5的始端、x7端接y向移动线性模组5-的报警端、x10端接x向移动线性模组5-6的伺服电机报警端、x11端接x向移动线性模组5-6的伺服电机正转极限端、x12端接x向移动线性模组5-6的伺服电机反转极限端、x13端接y向移动线性模组5-5的伺服电机报警端、x14端接y向移动线性模组5-5正转极限端、x15端接y向移动线性模组5-5反转极限端、x16端接抬升气缸5-4上升到位信号端、x17端接抬升气缸5-4下降到位信号端、y0端接x向移动线性模组5-6的伺服电机脉冲端、y1接x向移动线性模组5-6的伺服电机x向移动端、y2端接y向移动线性模组5-5的伺服电机脉冲端、y3端接y向移动线性模组5-5的伺服电机y向移动端、y4端接x向移动线性模组5-6的伺服电机急停端、y5端接x向移动线性模组5-6的伺服电机报警消除端、y6端接y向移动线性模组5-5的伺服电机急停端、y7端接y向移动线性模组5-5的伺服电机报警消除端、y
10
端接电磁阀左位控制抬升气缸5-4上升信号端、y
11
端接接电磁阀右位控制抬升气缸5-4下降信号端。
[0016]
使用方法
[0017]
打开电源开关7,将被喷涂产品置于产品定位治具5-1中,然后同时按下左启动按钮5-7-1、右启动按钮5-7-2,产品保护挡板5-2在抬升气缸5-4的带动下,下压在产品上,y向移动线性模组5-5、x向移动线性模组5-6在伺服电机驱动下,带动产品在xy方向上移动,等离子清洗机3将等离子气体吹在未被产品保护挡板5-2遮挡的产品部分上,喷涂后定位治具5-1会自动回到初始位置,产品保护挡板5-2在抬升气缸5-4的带动下,抬升到初始位,等待作业员取走产品。当出现异常或者维修时按下急停按钮5-9,若要继续工作须先按下复位按钮5-8,等待设备进行复位,再进行工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1