激光清洗系统及清洗方法与流程
1.本发明属于激光清洗技术领域,特别是涉及一种激光清洗系统及清洗方法。
背景技术:
2.随着我国工业的不断发展,金属制品能否进行翻新二次利用成为关注的焦点,同时在国家大力提倡环保的情况下,金属表面清洗后翻新利用以成为关注的交点。
3.金属材质零件在长时间使用或者停放后,会因为使用环境不同,产生不一样的表面污染,如表面生锈、积累油污、形成氧化层。严重的会造成金属件的直接报废不能使用,在对金属零件进行后加工前(如焊接、喷漆),需要将表面污染物去除才能进行后加工,如:金属焊前清洗污染物,可减少大量焊接气孔,提高焊缝质量;金属表面喷漆前清洗污染物,可提高油漆的金属表面附着力,延长油漆的使用寿命。
4.传统的金属表面清洗技术主要有喷砂、高压水、人工打磨等。喷砂技术存在污染大、劳作强度高、身体伤害大、耗材高等缺点;高压水存在水污染处理问题,设备投入较大;人工打磨存在伤金属基底、效率低下、粉尘严重等问题。而激光清洗是近十年来飞速发展起来的一种新型清洗技术,通过使材料表面的氧化物、油漆、涂层、镀层及其他污物等发生瞬间蒸发、剥离、气化等机理,从而脱离材料表面,达到洁净化的目的。具有清洗干净、效率高、无研磨、非接触、绿色环保,不但可以用来清洗有机的污染物,也可以用来清洗无机物,包括金属的锈蚀、金属微粒、灰尘等突出特点;激光清洗具有除锈、除漆、除胶、去油污、去涂层、去镀层等多种功能。
5.但是,现有技术中的激光清洗系统在对三维工件清洗时,往往因为工件曲面的变化,清洗激光的焦点很难始终保持在金属表面,造成清洗效果不均匀、不理想。
技术实现要素:
6.本发明解决了现有技术中清洗系统的清洗激光的焦点很难始终保持在金属表面,而造成清洗效果不均匀、不理想等技术问题,提供了一种激光清洗系统及清洗方法。
7.鉴于以上问题,本发明实施例提供的一种激光清洗系统,包括六轴机器人、激光器、距离传感器以及清洗头;所述清洗头包括光纤接头、准直镜片、振镜片、反射镜片、聚焦镜片以及安装座;所述清洗头通过所述安装座安装在所述六轴机器人上;
8.所述安装座上设有容纳空间以及均连通所述容纳空间的进口和出口,所述光纤接头安装在所述进口处,所述激光器通过所述光纤接头自所述进口向所述容纳空间中发射点激光束;
9.所述准直镜片、所述振镜片、所述聚焦镜片和所述反射镜片在所述容纳空间中沿激光光路顺次排布;自所述进口射入的点激光束垂直射入所述准直镜片并经所述准直镜片转化为平行点激光束之后,经过所述振镜片摆动反射后形成平行线激光束,再经过所述聚焦镜片聚焦后形成清洗激光束,被所述反射镜片的反射面反射并穿过所述出口照射至待清洗件表面对其进行清洗;
10.所述距离传感器设置在容纳空间中,且所述距离传感器位于所述反射镜片上背离反射面的一侧;所述距离传感器发射的检测激光穿过所述反射镜片并与所述反射镜片反射的清洗激光束重合照射至待清洗件表面,且所述检测激光在所述待清洗件表面的照射点位于所述清洗激光束照射在所述待清洗件表面的照射区域的中心位置;
11.所述距离传感器通过检测激光检测清洗头与待清洗件的照射点之间的实时距离,所述六轴机器人根据所述实时距离,实时调整所述清洗头与待清洗件表面之间的距离。
12.可选地,所述清洗头还包括安装在所述出口处的保护镜片,所述反射镜片反射的清洗激光束穿过所述保护镜片照射在待清洗件上。
13.可选地,所述激光清洗系统还包括用于冷却所述激光器和所述光纤接头的冷却装置,所述冷却装置连接所述激光器和所述光纤接头。
14.可选地,所述冷却装置为冷水机,所述激光器上设有第一冷却管路,所述光纤接头上设有第二冷却管路,所述冷水机连通所述第一冷却管路和所述第二冷却管路。
15.可选地,所述安装座包括第一安装筒、第二安装筒以及第三安装筒;所述容纳空间包括设置在所述第一安装筒上的第一内部空间、设置在所述第二安装筒上的第二内部空间,以及设置在所述第三安装筒上的第三内部空间;所述第一安装筒上还设有连通所述第一内部空间的所述进口,所述第三安装筒上还设有连通所述第三内部空间的所述出口;所述第一内部空间通过所述第二内部空间连通所述第三内部空间;
16.所述准直镜片和所述振镜片均安装在所述第一内部空间中,所述聚焦镜片安装在所述第二内部空间中,所述聚焦镜片安装在所述第二内部空间中,所述距离传感器和所述反射镜片均安装在所述第三内部空间中;所述第一安装筒的中心线与所述第三安装筒的中心线平行,所述第二安装筒的中心线与所述第一安装筒的中心线垂直。
17.可选地,所述反射镜片对所述清洗激光束成90度角反射;
18.经所述聚焦镜片发射的清洗激光束平行于水平面,经所述反射镜片反射的清洗激光束垂直于水平面。
19.可选地,所述激光清洗系统还包括用于对待清洗件的清洗轨迹进行编程的离线编程器,所述编程器连接所述六轴机器人。
20.可选地,所述激光器为脉冲光纤激光器,所述脉冲光纤激光器的功率范围为100w~1000w。
21.可选地,所述清洗头还包括驱动件,所述驱动件的输出端连接所述振镜片。
22.本发明另一实施例还提供了一种上述的激光清洗系统的清洗方法,包括:
23.获取待清洗件的清洗轨迹,根据所述清洗轨迹控制所述六轴机器人带动所述清洗头移动至预设清洗位置;其中,清洗头在预设清洗位置与待清洗件表面之间的距离为预设清洗距离;
24.控制所述激光器通过所光纤接头发出点激光束,点激光束垂直射入所述准直镜片并经所述准直镜片转化为平行点激光束之后,经过所述振镜片摆动反射后形成平行线激光束,再经过所述聚焦镜片聚焦后形成清洗激光束,被所述反射镜片的反射面反射并穿过所述出口照射至待清洗件表面;
25.获取所述距离传感器发出的检测激光检测清洗头与待清洗件的照射点之间的实时距离;
26.控制所述六轴机器人根据所述实时距离和所述清洗轨迹,实时调整所述清洗头与待清洗件表面之间的距离;其中,在清洗头清洗待清洗件的过程中,所述清洗头与待清洗件表面之间的距离始终保持为所述预设清洗距离。
27.本发明中,所述激光束发出的点激光经所述清洗头转换为线型的清洗激光,该清洗激光可以待清洗件表面的氧化物、油漆、涂层、镀层及其他污物等发生瞬间蒸发、剥离、气化等机理,从而脱离待清洗件的表面,达到清洗的目的;且具有清洗干净、效率高、无研磨、非接触、绿色环保等优点,不但可以用来清洗有机的污染物,也可以用来清洗无机物。另外,所述距离传感器可以实时的检测到所述反射镜与所述待清洗件之间的距离,进而可以通过所述六轴机器人实时调整所述清洗头与待清洗件的表面之间的距离,确保在清洗待清洗件的过程中,所述清洗头与待清洗件的清洗部位之间的始终为定值,也即所述清洗头发射的清洗激光的焦点始终聚焦在待清洗件的清洗部位上,从而提高了待清洗件的清洗质量,特别是适用于三维曲面的待清洗件的清洗工作。此外,将所述距离传感器布置在所述反光镜片的背面,且距离传感器发射的检测激光在所述待清洗件表面的照射点位于所述清洗激光束照射在所述待清洗件表面的照射区域的中心位置,从而提高了所述距离传感器的检测精度,进一步提高了激光清洗系统的清洗质量;所述反射镜片还可以将所述距离传感器与清洗激光束隔离,避免了清洗激光束对距离传感器的干扰,提高了该激光清洗系统的使用寿命。
附图说明
28.下面结合附图和实施例对本发明进一步说明。
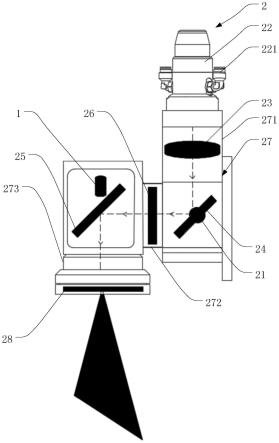
29.图1为本发明一实施例提供的激光清洗系统的结构示意图;
30.图2为本发明一实施例提供的激光清洗系统的清洗时的示意图;
31.图3为本发明一实施例提供的激光清洗系统的方法的流程图。
32.说明书中的附图标记如下:
33.1、距离传感器;2、清洗头;21、驱动件;22、光纤接头;221、第二冷却管路;23、准直镜片;24、振镜片;25、反射镜片;26、聚焦镜片;27、安装座;271、第一安装筒;272、第二安装筒;273、第三安装筒;28、保护镜片;10、待清洗件。
具体实施方式
34.为了使本发明所解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本发明进行进一步的详细说明。应当理解,此处所描述的具体实施例仅用以解释本发明,并不用于限定本发明。
35.需要理解的是,术语“上”、“下”、“左”、“右”、“前”、“后”、“中部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为本发明的限制。
36.如图1和图2所示,本发明一实施例提供了一种激光清洗系统,包括六轴机器人(图未示)、激光器(图未示)、距离传感器1以及清洗头2;所述清洗头2包括光纤接头22、准直镜片23、振镜片24、反射镜片25、聚焦镜片26以及安装座27;所述清洗头2通过所述安装座27安
装在所述六轴机器人上;可以理解地,所述六轴机器人可以带动所述清洗头2实现空间位置上六个自由度的运动。
37.所述安装座27上设有容纳空间以及均连通所述容纳空间的进口和出口,所述光纤接头22安装在所述进口处,所述激光器通过所述光纤接头22自所述进口向所述容纳空间中发射点激光束;可以理解地,所述激光器通过光纤连接所述光纤接头22,从而激光器通过所述光纤接头22发出激光束。
38.所述准直镜片23、所述振镜片24、所述聚焦镜片26和所述反射镜片25在所述容纳空间中沿激光光路顺次排布;自所述进口射入的点激光束垂直射入所述准直镜片23并经所述准直镜片23转化为平行点激光束之后,经过所述振镜片24摆动反射后形成平行线激光束,再经过所述聚焦镜片26聚焦后形成清洗激光束,被所述反射镜片25的反射面反射并穿过所述出口照射至待清洗件10表面对其进行清洗;可以理解地,所述清洗头2工作的过程中,所述振镜片24不停地摆动摆动,进而将点激光转化为线激光;且所述振镜摆动幅度的大小,决定着所述清洗激光束的截面大小。所述清洗激光束为线型光斑,该线型光斑的尺寸由所述振镜片24摆动的幅度以及所述聚焦镜片26与所述待清洗件10表面之间管路的距离所决定的。
39.所述距离传感器1设置在容纳空间中,且所述距离传感器1位于所述反射镜片25上背离反射面的一侧;所述距离传感器1发射的检测激光穿过所述反射镜片25并与所述反射镜片25反射的清洗激光束重合照射至待清洗件10表面,且所述检测激光在所述待清洗件10表面的照射点位于所述清洗激光束照射在所述待清洗件10表面的照射区域的中心位置;可以理解地,所述距离传感器1为激光传感器,其发出的检测激光(包括红光等)可以通过所述反射镜照射到待清洗件10的表面。
40.所述距离传感器1通过检测激光检测清洗头2与待清洗件10的照射点之间的实时距离,所述六轴机器人根据所述实时距离,实时调整所述清洗头2与待清洗件10表面之间的距离。可以理解的,通过所述六轴机器人对所述清洗头2空间位置的调整,确保从所述清洗头2射出的额清洗激光束聚焦在待清洗件10的表面上。
41.本发明中,所述激光束发出的点激光经所述清洗头2转换为线型的清洗激光,该清洗激光可以待清洗件10表面的氧化物、油漆、涂层、镀层及其他污物等发生瞬间蒸发、剥离、气化等机理,从而脱离待清洗件10的表面,达到清洗的目的;且具有清洗干净、效率高、无研磨、非接触、绿色环保等优点,不但可以用来清洗有机的污染物,也可以用来清洗无机物。另外,所述距离传感器1可以实时的检测到所述反射镜与所述待清洗件10之间的距离,进而可以通过所述六轴机器人实时调整所述清洗头2与待清洗件10的清洗部位之间的距离,确保在清洗待清洗件10的过程中,所述清洗头2与待清洗件10的清洗部位之间的始终为定值,也即所述清洗头2发射的清洗激光的焦点始终聚焦在待清洗件10的表面上,从而提高了待清洗件10的清洗质量,特别是适用于三维曲面的待清洗件10的清洗工作。此外,将所述距离传感器1布置在所述反光镜片的背面,且所述距离传感器1发射的检测激光在所述待清洗件10表面的照射点位于所述清洗激光束照射在所述待清洗件10表面的照射区域的中心位置,从而提高了所述距离传感器1的检测精度,进一步提高了激光清洗系统的清洗质量;所述反射镜片25还可以将所述距离传感器1与清洗激光束隔离,避免了清洗激光束对距离传感器1的干扰,提高了该激光清洗系统的使用寿命。
42.在一实施例中,如图1所示,所述清洗头2还包括安装在所述出口处的保护镜片28,所述反射镜片25反射的清洗激光束穿过所述保护镜片28照射在待清洗件10上。可以理解地,所述安装座27的进口被所述光纤接头22密封,所述安装座27的出口被所述保护镜片28密封,从而将所述安装座27的容纳空间与外界环境隔绝,别面了外界环境污染所述安装空间中的反射镜片25、振镜片24、聚焦镜片26、准直镜片23以及距离传感器1等,延长了该激光清洗系统的使用寿命。
43.在一实施例中,如图1所示,所述激光清洗系统还包括用于冷却所述激光器和所述光纤接头22的冷却装置(图未示),所述冷却装置连接所述激光器和所述光纤接头22。作为优选,所述冷却装置为冷水机,所述激光器上设有第一冷却管路(图未示),所述光纤接头22上设有第二冷却管路221,所述冷水机连通所述第一冷却管路和所述第二冷却管路221。可以理解地,由于所述激光器和所述光纤接头22在工作时会产生大量的热量,所述第一冷却管路和所述第二冷却管路221中的冷却液可以吸收所述激光器和所述光纤接头22的散发的热量,从而使得所述激光器和所述光纤接头22工作在合适的温度下,进一步延长了该激光清洗系统的使用寿命。
44.在一实施例中,如图1所示,所述安装座27包括第一安装筒271、第二安装筒272以及第三安装筒273;所述容纳空间包括设置在所述第一安装筒上的第一内部空间、设置在所述第二安装筒272上的第二内部空间,以及设置在所述第三安装筒273上的第三内部空间;所述第一安装筒271上还设有连通所述第一内部空间的所述进口,所述第三安装筒273上还设有连通所述第三内部空间的所述出口;所述第一内部空间通过所述第二内部空间连通所述第三内部空间;可以理解地,所述第二安装筒272连接在所述第一安装筒271和所述第三安装筒273之间。
45.所述准直镜片23和所述振镜片24均安装在所述第一内部空间中,所述聚焦镜片26安装在所述第二内部空间中,所述聚焦镜片26安装在所述第二内部空间中,所述距离传感器1和所述反射镜片25均安装在所述第三内部空间中;所述第一安装筒271的中心线与所述第三安装筒273的中心线平行,所述第二安装筒272的中心线与所述第一安装筒271的中心线垂直。本发明中,所述安装座27为分模块式设计,降低了所述安装座27的制造难度,且该安装座27的结构紧凑,减小了所述清洗头2在六轴机器人上的占用空间,提高了该清洗头2的适用性。
46.在一实施例中,如图1所示,所述反射镜片25对所述清洗激光束成90度角反射。
47.经所述聚焦镜片26发射的清洗激光束平行于水平面,经所述反射镜片25反射的清洗激光束垂直于水平面。可以理解地,从所述聚焦镜片26发射的清洗激光束的方向与水平面平行,从所述反射镜片25反射的清洗激光束的方向垂直于水平面,从而从所述清洗头2出口射出的清洗激光束可以垂直照射在待清洗件10的表面上,提高了该激光清洗系统的清洗质量,便于与所述六轴机器人对清洗头2空间位置的调节。
48.在一实施例中,如图1所示,所述激光清洗系统还包括用于对待清洗件10的清洗轨迹进行编程的离线编程器(图未示),所述编程器连接所述六轴机器人。可以理解地,所述离线编程器可以变成待清洗件10的模型,以及控制清洗头2清洗待清洗件10时的空间位置,从而可以带动全自动清洗的效果,提高了清洗效率和清洗质量。
49.在一实施例中,如图1所示,所述激光器为脉冲光纤激光器,所述脉冲光纤激光器
的功率范围为100w~1000w。可以理解地,所述脉冲光纤激光器发出的平行点激光为纳秒级激光,其易于清洗待清洗件10的表面。
50.在一实施例中,如图1所示,所述清洗头2还包括驱动件21,所述驱动件21的输出端连接所述振镜片24。可以理解地,所述驱动件21包括但不限于电机等,所述驱动件21可以带动所述振镜片24摆动,从而将平行点激光束转化为平行线激光束。
51.如图3所示,本发明另一实施例还提供了一种上述的激光清洗系统的清洗方法,包括:
52.s10、获取待清洗件10的清洗轨迹,根据所述清洗轨迹控制所述六轴机器人带动所述清洗头2移动至预设清洗位置;其中,清洗头2在预设清洗位置与待清洗件10表面之间的距离为预设清洗距离;可以理解地,可以通过离线编程器获取待清洗件10的形状信息,所述预设清洗位置为待清洗件10初始清洗位置的上方,且清洗激光的焦点聚焦在待清洗件10的表面上。
53.s20、控制所述激光器通过所光纤接头22发出点激光束,点激光束垂直射入所述准直镜片23并经所述准直镜片23转化为平行点激光束之后,经过所述振镜片24摆动反射后形成平行线激光束,再经过所述聚焦镜片26聚焦后形成清洗激光束,被所述反射镜片25的反射面反射并穿过所述出口照射至待清洗件10表面;可以理解地,此步骤为将激光器通过所述激光头发射的点激光束转化为线型的清洗激光束。
54.s30、获取所述距离传感器1发出的检测激光检测清洗头2与待清洗件10的照射点之间的实时距离;在激光2清洗待清洗件10的过程中,所述距离传感器1实时检测苏偶数清洗头2与待清洗件10表面之间的距离。
55.s40、控制所述六轴机器人根据所述实时距离和所述清洗轨迹,实时调整所述清洗头2与待清洗件10表面之间的距离;其中,在清洗头2清洗待清洗件10的过程中,所述清洗头2与待清洗件10表面之间的距离始终保持为所述预设清洗距离。可以理解地,所述六轴机器人根据所述实时距离和所述清洗轨迹实时调整所述清洗头2与待清洗件10表面之间的距离,保证所述清洗头2与待清洗件10表面之间的距离始终保持为所述预设清洗距离,也即从所述清洗头2出口射出的清洗激光束的焦点始终聚焦在所述待清洗件10的表面上。
56.本发明中,该清洗方法可以保证所述清洗头2出口射出的清洗激光束的焦点始终聚焦在所述待清洗件10的表面上,从而提高了待清洗件10的清洗质量;且该清洗方法根据所述实时距离和所述清洗轨迹自动完成待清洗件10的清洗工作,提高了清洗效率。
57.以上仅为本发明较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1