一种船用防疫机器人
1.本发明属于船舶防疫技术领域,涉及一种船用防疫机器人。
背景技术:
2.因新冠病毒的传播,确诊人数正在不断增多,在出海的船舶中,船员一直是新冠疫情的隐形受害者,不少船员已经感染新冠病毒。船员面临着多种高风险感染情境,如在船员在交接班时有感染风险;船舶离港后,若船上有疫情,海上没有相应的医疗支持,感染后果不堪设想,新冠肺炎疫情迅速发展给船舶营运、船员安全带来较大影响,船舶防疫与岸上防疫不同,有一定的特殊性和困难性,主要体现在封闭性、流动性和涉外性。以《海事劳工公约》为依据,要求做好船舶内部卫生工作,每次靠泊后,对理货间、办公室、梯口等进行消毒。
3.病毒在空气传播,如何净化空气、消杀病毒和不断稀释空气中病毒浓度,是目前海上防疫工作考虑的问题。但是目前技术中大多是通过人工喷洒消毒液进行消毒,导致消毒效率低而人工成本高,基于此市场上产生了固定设置的消毒机,但是这种设备消毒区域固定,消毒效率和使用率仍然较低。在空气防疫消杀领域中,智能防疫消毒机器人正逐步替代人工,为了统筹抓好疫情防控和生产经营各项工作,创新防疫措施,落实防疫保障,为了配合船舶行业防疫工作,我们提供了一种船用防疫机器人。
技术实现要素:
4.本发明的目的在于提供一种船用防疫机器人,以解决上述背景技术中提出的问题。
5.本发明的目的可通过下列技术方案来实现:一种船用防疫机器人,包括机器人壳体、绝缘防护罩和四个行走轮,所述机器人壳体的底端通过安装有四轮行走机构与四个行走轮装配连接,所述机器人壳体的顶端与绝缘防护罩固定连接,所述绝缘防护罩的内部固定安装有电路主板,所述绝缘防护罩的表面固定安装有多个环形分布的嵌入电导套,多个所述嵌入电导套的内部均固定安装有激光雷达模组,所述机器人壳体的两侧均开设有装配腔,两个所述装配腔的内部均螺纹连接有柱形喷洒头,所述机器人壳体的内腔固定安装有消毒剂存放瓶,所述消毒剂存放瓶的底端固定连接有液体泵,所述液体泵的输出端固定安装有输出管道,所述输出管道的一端连接有均分管道,所述均分管道的两端均固定连接有加压管道,两个所述加压管道分别与两个柱形喷洒头连通,所述消毒剂存放瓶的顶端固定安装有补液导管,所述电路主板的表面集成安装有第一处理芯片和第二处理芯片,所述第一处理芯片的表面集成有app连接模组、蚁群算法模组和efls融合定位模块。
6.在上述的一种船用防疫机器人中,所述四轮行走机构包括圆形底盘、两个车轮连接悬架和驱动电机,两个所述车轮连接悬架安装在圆形底盘的两边侧,两个所述车轮连接悬架的两端分别与四个行走轮连接,所述驱动电机的输出端与其中一个所述车轮连接悬架的传动端传动连接。
7.在上述的一种船用防疫机器人中,所述第二处理芯片的表面集成安装有3d 光镜
头模组和热成像镜头模组,所述3d光镜头模组的3d光镜头和热成像镜头模组的热成像镜头均安装在机器人壳体的表面。
8.在上述的一种船用防疫机器人中,所述机器人壳体两侧的底部固定安装有防撞橡胶围条。
9.在上述的一种船用防疫机器人中,所述机器人壳体正面的底部固定安装有充电接口,所述充电接口与机器人壳体的内置电源连通。
10.在上述的一种船用防疫机器人中,所述机器人壳体的外表面防水等级为ipx 的高标准。
11.与现有技术相比,本发明一种船用防疫机器人的优点为:通过设有的app连接模组、蚁群算法模组、efls融合定位模块、激光雷达模组、3d光镜头模组和热成像镜头模组,在船体的甲板、舱室内都能进行环境的消毒杀菌;能够根据设定的路线自动、高效、精准的定位识别,对室内进行消毒防疫,对于其他消毒工具来说较为方便,能有效、无死角地杀灭空气中的致病微生物;
12.本发明代替的“人工”消毒工作,一定程度上减轻了人工消毒繁琐的工作量,解放了人们的双手,同时也体现了科技进步改变和帮助人们更好的生活。
附图说明
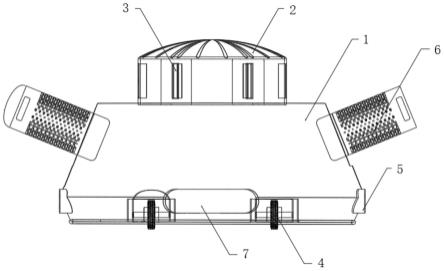
13.图1是本发明一种船用防疫机器人的平面结构示意图。
14.图2是本发明一种船用防疫机器人的机器人壳体俯视结构示意图。
15.图3是本发明一种船用防疫机器人消毒剂存放瓶的结构示意图。
16.图4是本发明一种船用防疫机器人的模块连接示意图。
17.图5是本发明一种船用防疫机器人第一处理芯片和第二处理芯片的结构示意图。
18.图中,1、机器人壳体;2、绝缘防护罩;3、嵌入电导套;4、行走轮;5、防撞橡胶围条;6、柱形喷洒头;7、充电接口;8、消毒剂存放瓶;9、均分管道; 10、加压管道;11、电路主板;12、液体泵;13、输出管道;14、补液导管;15、第一处理芯片;16、第二处理芯片;17、app连接模组;18、蚁群算法模组;19、 efls融合定位模块;20、激光雷达模组;21、3d光镜头模组;22、热成像镜头模组。
具体实施方式
19.以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
20.如图1、图2、图3、图4和图5所示,本发明一种船用防疫机器人,包括机器人壳体1、绝缘防护罩2和四个行走轮4,机器人壳体1的底端通过安装有四轮行走机构与四个行走轮4装配连接,机器人壳体1的顶端与绝缘防护罩2固定连接,绝缘防护罩2的内部固定安装有电路主板11,绝缘防护罩2的表面固定安装有多个环形分布的嵌入电导套3,多个嵌入电导套3的内部均固定安装有激光雷达模组20,机器人壳体1的两侧均开设有装配腔,两个装配腔的内部均螺纹连接有柱形喷洒头6,机器人壳体1的内腔固定安装有消毒剂存放瓶8,消毒剂存放瓶8的底端固定连接有液体泵12,液体泵12的输出端固定安装有输出管道13,输出管道13的一端连接有均分管道9,均分管道9的两端均固定连接有加压管道 10,两个加压管道10分
别与两个柱形喷洒头6连通,消毒剂存放瓶8的顶端固定安装有补液导管14,电路主板11的表面集成安装有第一处理芯片15和第二处理芯片16,第一处理芯片15的表面集成有app连接模组17、蚁群算法模组18 和efls融合定位模块19。
21.四轮行走机构包括圆形底盘、两个车轮连接悬架和驱动电机,两个车轮连接悬架安装在圆形底盘的两边侧,两个车轮连接悬架的两端分别与四个行走轮4连接,驱动电机的输出端与其中一个车轮连接悬架的传动端传动连接。
22.这样设置的目的是利用驱动电机的带动车轮连接悬架的传动机构,实现行走轮4的行走,传动机构可以是简单的输出轴,也可以是同步带同步轮组成的传动组件。
23.第二处理芯片16的表面集成安装有3d光镜头模组21和热成像镜头模组22, 3d光镜头模组21的3d光镜头和热成像镜头模组22的热成像镜头均安装在机器人壳体1的表面。
24.3d光镜头模组21和热成像镜头模组22均为高精确级别,这样设置的目的是便于更好的热成像以及摄像识别物体,能够适应船舶复杂的工作环境。
25.机器人壳体1两侧的底部固定安装有防撞橡胶围条5。
26.这样设置的目的是具有良好的防碰撞效果,保证机器人壳体1的完整性。
27.机器人壳体1正面的底部固定安装有充电接口7,充电接口7与机器人壳体 1的内置电源连通。
28.这样设置的目的是方便采用自动巡回方式,使得机器人壳体1自动巡回至充电桩进行充电作业,智能化程度更好。
29.机器人壳体1的外表面防水等级为ipx6的高标准。
30.这样设置的目的是使得机器人壳体1能够应对不同的船舶工作环境,提高使用寿命。
31.激光雷达模组20包括激光雷达传感器、环境监测传感器以及温湿度传感器等,能够对船舶的环境监测。
32.在使用时,机器人壳体1通电后,通过四轮行走机构带动机器人壳体1在船体的甲板、舱室内运动,进行环境的消毒杀菌;根据蚁群算法模组18和efls融合定位模块19能够根据设定的路线自动、高效、精准的定位识别,对室内进行消毒防疫,对于其他消毒工具来说较为方便,能有效、无死角地杀灭空气中的致病微生物,本发明代替的“人工”消毒工作,一定程度上减轻了人工消毒繁琐的工作量,解放了人们的双手,同时也体现了科技进步改变和帮助人们更好的生活。
33.本说明书中未作详细描述的内容属于本领域专业技术人员公知的现有技术。本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1