一种绝缘子清扫无人机的制作方法
一种绝缘子清扫无人机
1.本案为原始案一种具有清扫平台的绝缘子及绝缘子清扫工具和清洁方法的分案,原始案 的申请日:20200525,申请号:202010450030.8。
技术领域
2.本发明涉及电气设备的维护维修器具领域,具体为一种绝缘子清扫无人机。
背景技术:
3.绝缘子,是安装在不同电位的导体或导体与接地构件之间的能够耐受电压和机械应力作 用的器件,不应该由于环境和电负荷条件发生变化导致的各种机电应力而失效。绝缘子是一 种特殊的绝缘控件,能够在架空输电线路中起到重要作用。绝缘子由绝缘件和连接卡具组成。 在高压、超(特)高压输电线路上,通过多组盘状绝缘子相互连接形成串状结构,并通过者种 串状结构,将输电线路与输电铁塔相连接。绝缘子不仅要固定输电线路,还要防护输电线路 不能产生相间短路、接地短路。在潮湿天气情况下,脏污的绝缘子易发生闪络放电,所以必 须清扫干净,恢复原有绝缘水平。闪络现象是指固体绝缘子周围的气体或液体电介质被击穿 时,沿固体绝缘子表面放电的现象。其放电时的电压称为闪络电压。发生闪络后,电极间的 电压迅速下降到零或接近于零。闪络通道中的火花或电弧使绝缘表面局部过热造成炭化,损 坏表面绝缘。绝缘子损坏之后将严重影响绝缘子的绝缘特性,给供电的可靠性和安全性带来 隐患。因此保持绝缘子的清洁是绝缘子维护的保养的重要工作。然而在实际情况中,绝缘子 多设置在架空线路的高处,因此清洁非常的不便。因此设计一种便于清洁的绝缘子以及绝缘 子的清洁工具成为一种迫切的要求。
技术实现要素:
4.本发明要解决的技术问题是:提供了具有便于清洁的绝缘子的一种绝缘子清扫无人机。
5.本发明要解决的技术问题的技术方案是:一种绝缘子清扫无人机,包括无人机本体,其 特征在于:所述无人机本体的下部设有绝缘子清扫工具,所述绝缘子清扫工具包括:卡接部, 设有轨道;所述卡接部用以与具有清扫平台的绝缘子的轨道对接;所述绝缘子清扫工具的卡 接部与无人机本体的下部固定连接;滑动部,设于卡接部的轨道上;推进部,设于滑动部的 下部,所述推进部设有上下滑动的升降块;清洁部,通过连接杆与升降块连接;移动驱动装 置,驱动滑动部在轨道内移动;升降驱动装置,驱动升降块上下移动;控制器,与移动驱动 装置和升降驱动装置电气连接。
6.更好的,所述卡接部的轨道为截面形状倒置的凸字形的滑槽,
7.所述滑动部包括壳体、滚轮、转向箱;所述壳体滑动设置于卡接部的轨道内;所述壳体 下部设有开口;所述滚轮设于壳体内部;所述转向箱的两个输出轴与滚轮连接;
8.所述推进部的长度方向上设有升降滑槽,所述升降块设于升降滑槽内部;所述升降块中 部与丝轴螺接连接;
9.所述移动驱动装置包括电机和驱动轴,所述电机的转轴两端凸出;所述电机设于升降滑 槽的上部;所述驱动轴通过轴承固定在升降滑槽的上部,驱动轴的上端与转向箱下端的输入 轴连接,驱动轴的下端与电机的转轴连接;
10.所述升降驱动装置包括弹出电磁铁、吸附轴、卡接轴;所述弹出电磁铁设于电机的下部, 所述吸附轴外周设有环状的升降永磁铁;所述吸附轴的上端设有驱动卡槽,所述驱动卡槽的 截面形状和电机下端的转轴的截面形状相同;所述电机下端的转轴插接在驱动卡槽内部;所 述卡接轴通过轴承与升降滑槽连接,所述卡接轴的上端设有调节卡槽,弹出电磁铁极性与永 磁铁极性相同时吸附轴的下端插接在调节卡槽的内部,所述调节卡槽的截面形状与吸附轴下 端的截面形状相同;所述卡接轴的下端与丝轴固定连接。
11.更好的,所述卡接部的轨道为截面形状为倒置的凸字形的滑槽,
12.所述滑动部包括壳体,所述壳体滑动设置于卡接部的轨道内;所述壳体上部的两端设有 放置槽;所述放置槽内部设有锁定铁芯,所述放置槽的外周设有电磁线圈用以给锁定铁芯施 加磁性;所述放置槽的底部设有保持永磁铁;所述壳体的前部设有推出电磁铁,
13.所述推进部的长度方向上设有升降滑槽,所述升降块设于升降滑槽内部;所述升降块中 部与丝轴螺接连接;
14.所述移动驱动装置包括电机和驱动轴,所述电机的转轴两端凸出;所述电机设于升降滑 槽的上部;所述驱动轴穿过推进部凸出到推进部的外侧,所述驱动轴内端通过转向箱与电机 的转轴连接,所述驱动轴的外端设有驱动齿轮,所述固定环的下部设有平面齿轮,所述驱动 齿轮和平面齿轮啮合;
15.所述升降驱动装置包括弹出电磁铁、吸附轴、卡接轴;所述弹出电磁铁设于电机的下部, 所述吸附轴外周设有环状的升降永磁铁;所述吸附轴的上端设有驱动卡槽,所述驱动卡槽的 截面形状和电机下端的转轴的截面形状相同;所述电机下端的转轴插接在驱动卡槽内部;所 述卡接轴通过轴承与升降滑槽连接,所述卡接轴的上端设有调节卡槽,弹出电磁铁极性与永 磁铁极性相同时吸附轴的下端插接在调节卡槽的内部,所述调节卡槽的截面形状与吸附轴下 端的截面形状相同;所述卡接轴的下端与丝轴固定连接。
16.更好的,所述具有清扫平台的绝缘子包括绝缘子本体,所述绝缘子本体的零电位端设有 工作平台;所述工作平台包括:
17.轨道部,环状且其轴心线与绝缘子本体的轴心线重合,所述轨道部内侧通过连杆与绝缘 子本体固定连接,所述轨道部设有轨道;
18.对接部,设于轨道部的外侧,所述对接部设有轨道且与轨道部的轨道连接,用以接收外 部清洁装置并引入轨道部;
19.所述轨道部的轨道上靠近对接部的位置设有推出机构用以将外部清洁装置引导至对接部 内部。
20.更好的,所述对接部以相切的方式与轨道部连接;所述轨道为设置于轨道部和对接部上 的开口向下的凹槽,所述凹槽的截面形状为倒置的凸字形;所述推出机构为单向自复位挡片, 所述单向自复位挡片设于对接部的轨道与轨道部的轨道相切的位置;外部清洁装置逆时针转 动时单向自复位挡片被推开,外部清洁装置顺时针转动时单向自复位挡片锁定并将外部清洁 装置引导入对接部。
21.更好的,所述轨道部包括转动连接的固定环和转动环,所述对接部与固定环固定
连接; 所述转动环上设有工具卡槽;所述对接部的轨道为开口向下的凹槽,所述凹槽的截面形状为 倒置的凸字形;所述工具卡槽的截面形状与轨道的截面形状相同;所述工具卡槽的进口处为 第一方位,以此为起点顺时针方向的另外三个方位分别为第二方位、第三方位、第四方位; 所述第二方位和第四方位设有锁定孔,所述锁定孔的孔底设有锁定永磁铁;所述推出机构为 嵌设在第三方位的推出永磁铁。
22.更好的,所述对接部的端部设有导向装置,用以引导外部清洁装置进入轨道,所述导向 装置设有导向孔,所述导向孔形状梯形台,且导向孔大开口端朝外,小开口端的截面形状与 对接部外形相同;导向装置的下部设有行进孔,所述行进孔连通导向孔。
23.更好的,所述无人机设有直线推进装置和微型真空泵,所述直线推进装置为电动伸缩杆, 所述伸缩杆的端部设有真空吸头,所述真空吸头与微型真空泵通过电磁阀连通。
24.更好的,所述无人机包括设有显示屏的遥控器,所述卡接端的端部设有摄像头,
25.操作人员根据所述显示器显示卡接端的摄像头获取的图形来控制无人机的飞行实现卡接 部与对接部的对接。
26.本发明的有益效果为:
27.便于绝缘子的清洁,通过将清洁装置在工作平台的圆周移动既可以清洁绝缘子,具有效 率高效果好的有益效果。
附图说明
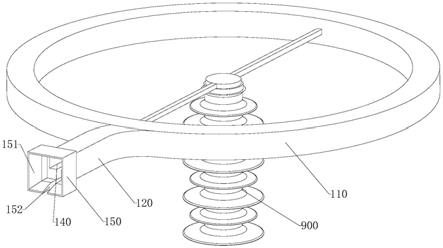
28.图1是实施例一外形示意图。
29.图2是实施例一的平面剖视图。
30.图3是绝缘子清洁工具实施例三的示意图。
31.图4是实施例三的一种示意图。
32.图5是实施例三的剖视图。
33.图6是实施例二的一种绝缘子的示意图。
34.图7是实施例二的外形示意图。
35.图8是实施例二一种绝缘子的剖视图。
36.图9是实施例二的水平面剖视图。
37.图10是本发明一种绝缘子清扫工具的实施例四的示意图。
38.图11是本发明一种实施例的剖视图。
39.图中:
40.293、保持永磁铁;241、通过连接杆;292、平面齿轮;291、驱动齿轮;226、电磁线圈; 266、升降永磁铁;290、丝轴;233、升降滑槽;152、行进孔;151、导向孔;150、导向装 置;136、推出永磁铁;135、锁定永磁铁;134、锁定孔;113d、第四方位;113c、第三方位; 113b、第二方位;113a、第一方位;113、工具卡槽;140、轨道;227、推出电磁铁;228、 锁定铁芯;229、放置槽;265、调节卡槽;264、驱动卡槽;263、卡接轴;262、吸附轴;261、 弹出电磁铁;251、电机;252、驱动轴;223、转向箱;222、滚轮;221、壳体;260、升降 驱动装置;250、移动驱动装置;240、清洁部;231、升降块;230、推进部;220、滑动部; 210、卡接部;112、转动环;111、固定环;130、单向自复位挡片;120、对接部;110、轨 道部;900、绝缘子本体;
具体实施方式
41.为使本发明的技术方案和有益效果更加清楚,下面对本发明的实施方式做进一步的详细 解释。
42.实施例一
43.一种具有清扫平台的绝缘子,包括绝缘子本体900,在所述绝缘子本体900的零电位端 设有工作平台。工作平台用以给外部的清洁装置提供一个作业平台,在改作业平台上对绝缘 子进行清洁。如图1所示,所述工作平台主要包括轨道部110和对接部120。
44.由于绝缘子截面多为圆形,因此轨道部110设计为环状。轨道部110所在环的轴心线与 绝缘子本体900的轴心线重合。为了实现轨道部110的固定,轨道部110内侧通过连杆与绝 缘子本体900固定连接。
45.为了给外部清洁装置提供工作的平台,所述轨道部设有轨道140。如图2所示,所述轨 道140为设置于轨道部110和对接部120上的开口向下的凹槽,所述凹槽的截面形状为倒置 的凸字形。凹槽的长度方向与轨道部110以及对接部120的长度方向重合。
46.对接部120设于轨道部110的外侧,所述对接部120设有与轨道部110相同的的轨道140 且该轨道140与轨道部110的轨道连接,用以接收外部清洁装置并引入轨道部110。
47.为了实现对接部120与轨道部110的轨道140的衔接,所述对接部120以相切的方式与 轨道部110连接。轨道部110为圆环形,对接部120朝外的一端为直线形,与轨道部110相 邻的一端为曲线行,且该曲线与直线平滑连接,与轨道部110的圆形通过相切的方式连接。 此时,外部清洁装置在轨道内部移动时,可以平滑的从对接部120进入轨道部110。
48.为了便于外部清洁装置出入轨道部,在所述轨道部110的轨道上靠近对接部120的位置 设有推出机构。推出机构用以将外部清洁装置引导至对接部120内部。如图2所示,所述推 出机构为单向自复位挡片130,所述单向自复位挡片130设于对接部120的轨道与轨道部110 的轨道相切的位置。单向自复位挡片130成对设置,一个与轨道的内侧连接,一个与轨道的 外侧连接。如图2所示,单向自复位挡片130所在面为曲面且为对接部120的曲线的延伸。 挡片通过转轴与轨道部110上设置复位凹槽连接,转轴一侧设置限位轴用以限定单向自复位 挡片130的转动方向,同时在转轴和单向自复位挡片130之间设有扭簧以使130自动复位, 作为常规技术,扭簧未在图中示出。
49.基于上述单向自复位挡片130的结构在外部清洁装置逆时针转动时单向自复位挡片130 被推开;在外部清洁装置顺时针转动时单向自复位挡片130锁定,由于单向自复位挡片130 无法逆向转动单向自复位挡片130将改变外部清洁装置的移动轨迹并将外部清洁装置引导 入对接部120。
50.实施例二
51.如图2所示,本实施例中所述轨道部110包括转动连接的固定环111和转动环112。其 中固定环111和绝缘子本体900固定连接,转动环112可以围绕固定环111相对转动。为了 避免对接部120对转动环112影响,所述对接部120与固定环111固定连接。如图8所示, 固定环111和对接部120通过一个π形的连接件连接成一体。
52.为使外部的清洁工具能够围绕绝缘子本体转动,需要设置驱动装置和外部清洁工具的承 接载体。在所述转动环112上设有工具卡槽113,作为外部清洁工具的承接载体。
53.所述对接部120设有轨道,该轨道与实施例一种轨道相同,对接部120的轨道为开
口向 下的凹槽,所述凹槽的截面形状为倒置的凸字形。对接部120与轨道部110的转动环112垂 直相接。为了实现对接所述工具卡槽113的截面形状与轨道140的截面形状相同,且工具卡 槽113位于轨道部与对接部120的连接处,工具卡槽与对接部的轨道的延伸方向重合。在外 部清洁工具经过对接部120到达工具卡槽113的位置时,卡接在工具卡槽的内部。工具卡槽 113在轨道部外侧面和底部平面是敞开的,以便外部清洁工具进入,同时便于外部工具的推 进部的进入。所述工具卡槽113的进口处为第一方位113a,进口处为轨道部的外部侧面且与 对接部的轨道连接的位置,以此为起点顺时针方向的另外三个方位分别为第二方位113b、第 三方位113c、第四方位113d;所述第二方位113b和第四方位113d设有锁定孔134,所述锁 定孔的孔底设有锁定永磁铁135;所述推出机构为嵌设在第三方位113c的推出永磁铁136。
54.外部清洁装置上设有推出电磁铁227,通过改变推出电磁铁227的电流的流向可以控制 推出电磁铁227是与推出永磁铁136吸合合适排斥,在排斥时,既可以将外部清洁装置弹出 轨道部110进入对接部120。
55.为了实现对转动环的驱动,在固定环111的下部环面上设有平面齿轮292,通过卡接在 工具卡槽113内部的驱动机构与平面齿轮啮合实现转动环112相对固定环的转动。
56.进一步的,在实施例一和实施例二的基础上,所述对接部120的端部设有导向装置150, 用以引导外部清洁装置进入轨道。如图1和图2所示,所述导向装置设有导向孔151,所述 导向孔151形状梯形台,且导向孔151大开口端朝外,小开口端的截面形状与对接部120外 形相同;导向装置150的下部设有行进孔,所述行进孔152连通导向孔151。
57.外部清洁装置在需要进入该具有清扫平台的绝缘子的工作平台时,由于导向装置150的 具有较大的开口且其小口端与对接部120的截面形状相同,因此可以通过导向装置较为容易 的将外部的清洁装置引导如工作平台。
58.更好的,为了保持清扫工具与导向装置的稳定连接,如图2所示,导向孔151的小口端 到导向装置与对接部的连接处设有一端导向孔151的延伸孔。该延伸孔的长度可根据对接部 的长度设定。
59.实施例一和实施例二中的绝缘子具有轨道机构,属于机械机构,且不含易受干扰的电子 元件。因此其具有简单的机构,且其位于绝缘子的零电位端,因此对绝缘子的作用不会产生 影响,尤其是在大雨以及大风天气。这是采用分离式的绝缘子清洁装置的优势:
60.一、绝缘子本身结构简单,且不会向高电位端延伸,降低了绝缘风险;
61.二、由于绝缘子清扫工具外置,因此可以有效延长绝缘子清扫工具的使用寿命。
62.对应实施例一和实施例二的一种带有具有清扫平台的绝缘子,需要一种特定的工具。本 实施例就是一种与之匹配的绝缘子清扫工具。一种绝缘子清扫工具,包括卡接部210、滑动 部220、推进部230、清洁部240以及移动驱动装置250和升降驱动装置260。
63.卡接部210用以和对接部120对接,以便滑动部220能够进入绝缘子的清扫平台。因此 卡接部210设有轨道。如图所示,本实施例中卡接部210的外部形状和对接部120的外部形 状相同,且设有与对接部120相同的轨道。由实施例一和实施例二可知,轨道140为设置于 对接部120上的开口向下的凹槽,所述凹槽的截面形状为倒置的凸字形。凹槽的长度方向与 对接部120的长度方向重合。
64.滑动部220滑动设置在卡接部210的轨道上。滑动部220可以在卡接部210的轨道上
移 动,滑动部220带动下部的清洁部240移动。滑动部220包括壳体221、滚轮222、转向箱 223。壳体为下部敞开的盒体,壳体221下部设有开口该开口用以放置滚轮222。所述滚轮222 设于壳体221内部,滚轮的下部伸出到壳体的外部。两个滚轮架设在轨道的两个边缘上。为 了驱动两个滚轮转动,在两个滚轮之间设置了转向箱,该转向箱223用以将竖直方向转动的 转轴转换为水平方向转动的转轴。转向箱223的输入轴朝下,输出轴为水平方向。水平方向 的两个水平转轴用以安装滚轮。转向箱和壳体的上部固定连接,所述转向箱223的两个输出 轴与滚轮222连接。或者输出轴穿过滚轮之后通过轴承与壳体转动连接。在滚轮222的带动 下壳体221可在卡接部210的轨道内进行滑动。
65.滑动部220用以实现清扫工具的移动。推进部230用以实现清洁部240的上下移动,以 便完成一个伞裙的清洁之后清洁一个伞裙。推进部230设于滑动部220的下部并且所述推进 部230设有上下滑动的升降块231。如图所示,推进部230为长条形的立方体,其上端和滑 动部220的下端固定连接。在推进部230上设有升降滑槽233,升降滑槽233的截面形状为 凸字形,且其小口端朝向绝缘子。在升降滑槽233内部设有升降块231和丝轴290。升降块 与丝轴290转动连接。在丝轴290的驱动下,升降块231可在升降滑槽233内升降。
66.清洁部240用以实现对绝缘子的清洁。清洁部240通过连接杆241与升降块231连接。 由于绝缘子的种类繁多且不同的型号的绝缘子也略有不同因此,清洁部240采用海绵或者是 刷子,且清洁部240朝向绝缘子的端部的一面的形状与绝缘子一个伞裙的纵切后某一截面的 外部轮廓的形状相同。在清洁部被推进到绝缘子的时候,清洁部240与绝缘子的外部贴合通 过转动即可实现清洁。
67.为了实现对滑动部220和推进部230的驱动设置了移动驱动装置250和升降驱动装置260。
68.移动驱动装置可以设置在滑动部的内部也可以设置在推进部的内部。如图所示,为了减 小滑动部的体积,将移动驱动装置250设置在推进部230的升降滑槽233的内部。
69.所述移动驱动装置250包括电机251和驱动轴252、所述电机251的转轴两端凸出。所 述电机251设于升降滑槽233的上部,且电机的转轴为竖直方向,即和升降滑槽233的长度 方向重合。所述驱动轴252通过轴承固定在升降滑槽233的上部。驱动轴252的上端与转向 箱223下端的输入轴连接。驱动轴252的下端与电机的转轴连接。通过驱动轴电机可驱动滑 动部的滚轮转动。
70.升降驱动装置的直接驱动部件还是上述电机251,并且通过一个离合装置实现丝轴与电 机转轴的结合和脱离。具体的,升降驱动装置260包括弹出电磁铁261、吸附轴262、卡接轴 263。如图所示,所述弹出电磁铁261设于电机251的下部,为了保持稳定,弹出电磁铁261 可以设置多个并且均匀分布在电机转轴的周围。所述吸附轴262外周设有环状的升降永磁铁 266,升降永磁铁和弹出电磁铁261在竖直方向上重合,吸附轴通过升降永磁铁266与弹出电 磁铁261配合实现电机转轴与丝轴的结合和脱离。所述吸附轴262的上端设有驱动卡槽264, 所述驱动卡槽264的截面形状和电机251下端的转轴的截面形状相同,进一步,两者的截面 形状为非圆形,以使两者能够联动。所述电机251下端的转轴插接在驱动卡槽264内部;所 述卡接轴263通过轴承与升降滑槽233连接,所述卡接轴263的上端设有调节卡槽265,弹 出电磁铁261极性与永磁铁极性相同时吸附轴262的下端插接在调节卡槽265的内部,并且 电机转轴仍然插接在驱动卡槽264的内部。所述调节卡槽265的截面形状与吸
附轴262下端 的截面形状相同,两者的截面形状为非圆形,以使两者能够联动。所述卡接轴263的下端与 丝轴290固定连接。弹出电磁铁261极性与永磁铁极性相异时吸附轴262的下端脱离调节卡 槽265,电机不在驱动丝轴转动。此时,通过控制弹出电磁铁261以及电机的转动方向既可 以实现清洁部的升降。
71.控制器与移动驱动装置和升降驱动装置电气连接用以实现对移动驱动装置250和升降驱 动装置260的控制。控制器为设有储能装置的控制系统。该系统采用蓄电池作为电源,采用 单片机作为微控制器辅助以相关的外围电路组成。移动驱动装置250和升降驱动装置260的 主要控制部件为电机和电磁铁,其控制的方式主要是启停和通断,上述控制方式属于较为常 规的控制电路,在此不在详细说明。
72.控制器可以设置在推进部230的外部,与推进部远离绝缘子的一侧面固定连接,然后通 过导线与电机或者电磁铁连接。
73.实施例三中主要针对实施例一种的绝缘子,针对实施例二中的绝缘子,可以采用实施例 三中的清扫工具也可以采用本实施例中清扫工具。
74.本实施例中中的一种绝缘子清扫工具同样包括卡接部210、滑动部220、推进部230、清 洁部240以及移动驱动装置250和升降驱动装置260。
75.本实施例中卡接部与实施例三中的卡接部结构相同。
76.本实施例中滑动部可以与实施例三中的滑动部相同,同样可以在实施例三的基础上包含 本实施例中的一下结构,也可以只设置本实施例中的一下结构。
77.滑动部220包括壳体221,所述壳体221滑动设置于卡接部210的轨道内。壳体221可 以为内部设有滚轮的下部敞开的盒体,也可以为立方体。
78.所述壳体221的两端面上部设有放置槽229,所述放置槽内部设有锁定铁芯228。锁定铁 芯228在放置槽229内部滑动并且可以保持一半位于放置槽229的内部一半位于外部的状态。 为了使锁定铁芯228能够滑动,在所述放置槽229的外周设有电磁线圈226用以给锁定铁芯 228施加磁性。电磁线圈226通电后,锁定铁芯228会产生磁性,在锁定永磁铁135以及保 持永磁铁293的作用下实现在放置槽229内部的滑动。所述保持永磁铁293设于放置槽229 的底部。所述壳体221的前部设有推出电磁铁227,在给推出电磁铁227施加特定流向的电 流时,在推出永磁铁136的作用下,滑动部被推出工具卡槽113。
79.该实施例中推进部的结构和实施例这三种推进部的结构相同。推进部230的内部同样设 有升降滑槽233、升降块231以及丝轴。
80.本实施中移动驱动装置同样包括转轴两端凸出的电机251和驱动轴252。电机设置在升 降滑槽233的内部的上部,且电机转轴的轴线方向与升降滑槽233的长度方向平行。所述驱 动轴252穿过推进部230凸出到推进部230的外侧。所述驱动轴252内端通过转向箱223与 电机251的转轴连接,所述驱动轴252的外端设有驱动齿轮291,所述固定环111的下部设 有平面齿轮292,所述驱动齿轮291和平面齿轮292啮合。电机通过驱动轴驱动驱动齿轮291 转动,由于此时滑动部与转动环112形成一个整体,驱动齿轮转动后在平面齿轮292相对力 的作用下,驱动转动环转动。
81.本实施例中的升降驱动装置260与实施例三中的升降驱动装置260的结构相同。
82.该是实施例中同样设有驱动移动驱动装置和升降驱动装置的控制器,用以驱动移动驱动 装置和升降驱动装置。
83.进一步的,在滑动部220内部不设置滚轮以及驱动滚轮转动的转向箱223的时候,在卡 接部的端部设有引导装置,引导装置为升缩杆,更好的为电动伸缩杆。电动伸缩杆设置卡接 部的轨道内部。通过伸缩杆的端部的直线运动将滑动部推入工具卡槽内部。伸缩杆的端部设 有永磁铁,滑动部的后部设有与其相吸的永磁铁,在退出工具卡槽之后,伸缩杆可以将滑动 部吸出并引导如卡接部。如果电压等级不是较高,如10kv等级的架空线,绝缘子相对位置轿 底,此时通过长杆插入对接部的轨道内将滑动部推进工具卡槽。
84.对于电压等级较高的绝缘子,如110kv电压等级的架空线,其绝缘子位于较高的位置, 此时可以采用无人机将清扫工具送入绝缘子的工作平台。
85.一种无人机,包括无人机本体,所述无人机本体的下部设有实施例三或者实施例四所述 的绝缘子清扫工具。所述绝缘子清扫工具的卡接部210与无人机本体的下部固定连接。无人 机带着绝缘子清扫工具飞到高处然后将卡接部与对接部对接,最后将滑动部倒入对接部。
86.更好的,为了实现实施例四中的清扫工具进入对接部,所述无人机设有直线推进装置和 微型真空泵,所述直线推进装置为电动伸缩杆,所述伸缩杆的端部设有真空吸头,所述真空 吸头与微型真空泵通过电磁阀连通。电动伸缩杆的长度方向与卡接部的轨道的长度方向重合, 电动伸缩杆可设置与轨道内部。
87.为了实现精准的对接,所述无人机包括设有显示屏的遥控器,所述卡接端的端部设有摄 像头。操作人员根据所述显示器显示卡接端的摄像头获取的图形来控制无人机的飞行实现卡 接部与对接部的对接。
88.利用本发明公开的绝缘子清扫工具清扫带有工作平台的绝缘子的方法包括以下步骤:
89.步骤1、将绝缘子清扫工具送入工作平台:
90.利用升降杆或者无人机将绝缘子清扫工具的卡接部210的端部送入导向装置150,并使 卡接部210的端部与对接部120的端部抵接。将卡接部210插入导向装置150,由于导向装 置内部具有一定深度的延伸于导向孔151小口端至导向装置150外部的的通孔,可以保证卡 接部在导向装置内稳定的与对接部对接。
91.更好的,所述对接部120的端部设有对接永磁铁,所述卡接部210的端部设有对接电磁 铁;卡接部210经导向装置与对接部120的端部抵接时,对接电磁铁和对接永磁铁相对并吸 附,此时对接电磁铁不通电;给对接电磁铁通电时,对接电磁铁与对接永磁铁相斥实现对接 部与卡接部的分离。对接部上设有蓄电池以及遥控开关,已实现地面人员对对接电磁铁的操 控。或者,对接电磁铁采用永磁铁代替,通过一定的外力实现两者的分离。
92.然后将滑动部通过对接部120送入轨道部。绝缘子清扫工具的控制器内部设定有控制程 序或者控制器内部设有遥控器接收模块用以接收遥控指令。
93.实施例一与实施例三配合时:
94.控制器控制滑动部向前滚动,在滚动,滚动过程中有卡接部的轨道移动至对接部的轨道 内部。继续滚动进入轨道部的内部。
95.实施例二与实施例四配合时:
96.通过绝缘子清扫工具自带的引导装置或者通过外部机构,如长的伸缩杆,将滑动部推进 到对接部不然后推进到工具卡槽内部。对接部设有引导装置的时候,对接部还设有
蓄电池和 遥控开关用以实现对引导装置的控制。采用长杆时,一般用在10kv等级的架空线上,此时通 过长杆插入轨道内部,为了便于操作,在将卡接部升到高处之前就将长杆插入轨道内部,卡 接部与对接部完成对接之后,直接移动长杆将滑动部经过对接部直至推入工具卡槽内部。
97.在滑动部进入工具卡槽内部之后,通过遥控控制的方式给绕设在锁定铁芯228外部的电 磁线圈226通电,使锁定铁芯产生磁性,通过控制输入特定方向的电流锁定铁芯产生与保持 永磁铁293相斥,与锁定永磁铁135相吸的磁性,此时锁定铁芯228插入工具卡槽113的锁 定孔134的内部。此时,滑动部与工具卡槽113实现锁定,两者组成一体。
98.步骤2、启动清洁工具:
99.控制器控制移动驱动装置驱动绝缘子清扫工具围绕绝缘子转动,清洁部在转动的过程中 对绝缘子进行清洁。控制器内设有设定的程序,或控制器设有遥控接收器接收外部的控制指 令。
100.在对一节绝缘子清洁完成后,控制器控制升降驱动装置控制清洁部向下移动一节。
101.为了更好的检测清扫工具的位置,所述轨道上设有均匀分布的触发点,所述触发点为铁 块;所述滑动部220设有感应开关,所述感应开关与触发点处于同一圆周上。
102.实施例一中,触发点位于轨道内部,且均匀分布,对应的,实施例三中,感应开关设于 滑动部的上部且与触发点位置对应的位置。
103.实施例二中,触发点位于固定环的下部平面且位于平面齿轮的另一侧,对应的,感应开 关通过支架或者长杆与推进部230连接,感应开关的位置与触发点的位置上下重合。
104.在实施例一与实施例三配合时:
105.控制器控制移动驱动装置250使绝缘子清扫工具逆时针转动,此时电机正转。滑动部移 动至单向自复位挡片130位置时,单向自复位挡片130被推开,滑动部220可以在轨道部的 轨道部110内部逆时针方向循环转圈。
106.在对一节绝缘子清洁完成后,控制器控制升降驱动装置控制清洁部向下移动一节,此时 需要对清洁部的位置进行调整。在调整清洁部240的位置时,控制器控制电机翻转,此时, 滑动部在轨道内部顺时针转动。为了防止滑动部进入对接部,控制器通过设置在滑动部的感 应开关确定自己的位置,当从其位置顺时针转动至对接部120的切点位置时电机转动的圈数 大于清洁部240下降一节电机转动的圈数时,控制器驱动弹出电磁铁261通电,此时弹出电 磁铁261的极性与弹出永磁铁极性相同,电机与丝轴联动,驱动滑动块上下移动。
107.或者,在调整清洁部240的位置时,电机驱动清洁部下下降一个伞裙的高度转动的圈数 所驱动的滑动部的移动的距离小于顺时针方向滑动部距离对接部的端部的长度即可。
108.更好的,为了准确定位清洁部下降的高度,以便对每一个伞裙实现清洁,电机采用步进 电机或者伺服电机,通过计算圈数确定下降的高度。或者,在推进部的升降滑槽233的侧壁 上设有圈数计数器,圈数计数器采用感应开关,驱动卡槽264的外周设有触发源,感应开关 采用涡流式感应开关,触发源采用铁质,触发源为嵌设在外周的凸块。凸块可以设置多个且 均匀分布。控制器与驱动卡槽264触发开关连接,获取转动的圈数。
109.实施例二与实施例四配合时:
110.由于滑动部220与转动环112连成一体,滑动部不会应为正反转进入对接部。此时正反 转的控制通过控制电机的正反转即可。升降控制时,直接控制弹出电磁铁261即可,不用考 虑正反转对转动环的影响。
111.可通过设定程序、遥控触发、感应触发的方式启动清洁工具。如在某一伞裙转动特定的 圈数之后,启动升降驱动装置。
112.更好的,为了实现更好的清洁效果,同时便于清洁部的上下调节,连接杆241为长度方 向具有弹性的伸缩杆。如套管结构,大管内部设有推进小关的弹簧。
113.步骤3、清洁结束后,控制器控制绝缘子清扫工具退出轨道部110,然后利用升降杆或者 无人机在对接部的端部等待,绝缘子清扫工具退出对接部后将其取下。
114.在实施例一与实施例三配合时:
115.控制器控制滑动部220顺时针转动,当滑动部220移动至单向自复位挡片130位置时, 单向自复位挡片130锁定并将滑动部220引入对接部120。继续控制滑动部移动直至其移动 至导向装置的位置。清洁工具的卡接部210保持在导向装置的内部,此时滑动部220可以进 入卡接部的轨道内部,实现清扫工具与绝缘子的脱离。
116.实施例二与实施例四配合时:
117.控制器控制电磁线圈导通,锁定铁芯228产生磁性并与锁定永磁铁产生斥力,锁定铁芯228回到放置槽229内部并与保持永磁铁吸附,之后断开电磁线圈的电源。此时,锁定铁芯 228解除滑动部220与转动环112的锁定。
118.控制器控制推出电磁铁227导通电源,推出电磁铁227产生的极性与推出永磁铁的极性 相同,将滑动部推出工具卡槽。之后通过对接部的引导装置或者是端部设有真空吸头的电动 伸缩杆将滑动部引出对接部并引入卡接部210。或者通过长杆拨动的方式将滑动部220引致 卡接部210。
119.综上所述,仅为本发明的较佳实施例而已,并非用来限定本发明的范围,通过上述的说 明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及 修改。本发明的技术性范围并不局限于说明书上的内容,凡依本发明的要求范围所述的形状、 构造、特征及精神所谓的均等变化与修饰,均应包括与本发明的权利要求范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1