一种船舶除锈机器人的除锈及污水回收装置
1.本发明属于船舶除锈机器人技术领域,尤其涉及一种船舶除锈机器人的除锈及污水回收装置。
背景技术:
2.目前,船舶除锈机器人一般都是采用永磁吸附方式为机器人提供爬壁的吸附力,即是通过在履带的链条上设置若干的永磁吸附单元,在履带爬行时,其链条上的永磁吸附单元就会与船舷的壁面进行不间断的吸附和脱离动作,从而实现除锈机器人在船舷上的自如行走,在船舶壁体上行走的机器人可以将清洗装置移动到不同位置,使得清洗装置内的摇臂方便从不同角度将铜矿砂从喷枪高速喷出,冲击船舶壁面,从而达到除锈的效果。
3.但是,现有的船舶除锈机器人一般都是采用永磁吸附的方式为机器人提供爬壁的吸附力,而该船舶除锈机器人在除完锈后,并没有及时将锈渣回收,导致了该船舶除锈机器人在清洗的船舶壁体上爬行时,其履带上吸附过多锈渣使得永磁吸附单元的磁性吸附力减弱,造成行走困难、甚至倾覆问题;同时现有的船舶除锈机器人一般都是采用传统的喷砂除锈方式,且不能及时地将去除后的锈渣和污水回收处理,也会给环境带来了严重的污染。
技术实现要素:
4.本发明的目的在于提供一种船舶除锈机器人的除锈及污水回收装置,能够快速干净地给船舶清污除锈,并对清除后的锈渣和污水进行及时的回收处理,使得船舶除锈机器人的永磁吸附履带在爬行时能够保持较强的吸附力,从而避免倾覆问题,同时又不会造成海洋环境的污染。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种船舶除锈机器人的除锈及污水回收装置,包括除锈及污水回收装置,所述除锈及污水回收装置设置在船舶除锈机器人的机架内;所述除锈及污水回收装置,包括清洗罩、密封垫、驱动机构和旋转高压水射流系统,所述清洗罩设有用于安装旋转高压水射流系统的内部容纳空间,所述内部容纳空间的底侧设有一个敞开的开口部,所述旋转高压水射流系统与清洗罩外部的驱动机构连接,由驱动机构驱动旋转高压水射流系统旋转,所述清洗罩的侧边还设有与清洗罩的内部容纳空间相连通的真空管接口,所述真空管接口的外接口通过真空管道与真空回收系统连接。
7.进一步地,所述清洗罩的开口部的边沿上设有密封垫。
8.进一步地,所述清洗罩的外侧设有弹性调节机构,所述弹性调节机构包括支撑架、伸缩杆、伸缩弹簧和万向轮,所述支撑架一端与清洗罩的侧边连接固定,另一端远离清洗罩并与伸缩杆的顶端可伸缩性垂直连接,伸缩杆的底端与万向轮连接,所述伸缩杆中套设有伸缩弹簧,所述伸缩弹簧的顶端与支撑架固定连接,下端与万向轮的转向座连接。
9.进一步地,所述弹性调节机构设有四个,且分别相互对称设置在清洗罩的外侧。
10.进一步地,所述旋转高压水射流系统,包括旋转轴、六通阀和喷嘴,所述旋转轴通
过轴承与清洗罩的顶侧的中心轴孔转动性连接,所述旋转轴的顶端与驱动机构连接,底端通过六通阀均匀设有喷嘴,所述旋转轴通过顶端接口与入水接管转性连接。
11.进一步地,所述驱动机构,包括电机、电机座、电机齿轮和旋转轴齿轮,所述电机通过电机座设在清洗罩的顶侧,所述电机的输出轴上设有电机齿轮,所述电机齿轮与旋转轴齿轮相啮合,所述旋转轴齿轮通过旋转轴与入水接管转动性连接,所述入水接管通过入水接管架设在电机座上,所述电机通过电机齿轮带动旋转轴齿轮转动,旋转轴齿轮带动旋转轴转动,旋转轴通过六通阀带动喷嘴旋转。
12.进一步地,所述清洗罩分为上、下级罩体,所述上级罩体的体积小于下级罩体的体积,上、下级罩体连接后形成上小下大的台阶式设置。
13.进一步地,所述真空管接口设在上级罩体中。
14.进一步地,所述密封垫为环状的硅胶圈,所述密封垫通过环形凹槽与清洗罩的开口部的边沿设置的环形凸缘相互卡合固定设置。
15.进一步地,所述喷嘴设有六个,所述六个喷嘴均为环绕六通阀设置。
16.本发明的优点是:本发明在现有除锈机器人技术的基础上进行了改进,采用真空密闭式除锈作业代替传统的摇臂式方式,同时采用旋转高压水射流的除锈方式代替传统的喷砂除锈方式,通过真空回收系统回收废水和锈渣,能达到干净及快速的清洗及回收效果,使得该除锈机器人能够在船舶的壁体上行走自如,避免了倾覆和解决了环境污染的问题。
附图说明
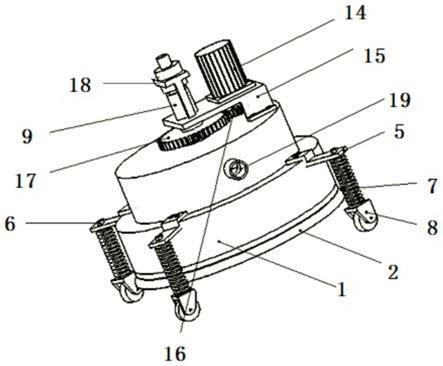
17.图1为本发明的立体结构示意图;
18.图2为本发明的底侧结构示意图;
19.图3为本发明的爆炸图;
20.图4为本发明的清洗罩结构示意图;
21.图5为本发明的密封垫结构示意图;
22.图6为本发明的清洗罩上的真空管接口示意图;
23.图7为本发明的旋转高压水射流系统的爆炸图;
24.图8为本发明的水入接管架结构示意图;
25.图9为本发明的旋转轴结构示意图。
26.图中:1清洗罩、2密封垫、3环形凹槽、4环形凸缘、5支撑架、6伸缩杆、7伸缩弹簧、8万向轮、9旋转轴、10六通阀、11喷嘴、12轴承、13中心轴孔、14电机、15电机座、16电机齿轮、17旋转轴齿轮、18入水接管架、19真空管接口、20入水接管。
具体实施方式
27.下面结合附图与具体实施方式对本发明作进一步详细描述。
28.如图1
‑
9所示,一种船舶除锈机器人的除锈及污水回收装置,包括除锈及污水回收装置,所述除锈及污水回收装置设置在船舶除锈机器人的机架内并与船舶的壁体接触工作,所述机架通过永磁吸附履带驱动在船舶的壁体上爬行,所述除锈及污水回收装置通过机架载动运行到达船舶壁体上的任何位置进行除锈及对除锈后的锈渣和污水的回收工作,所述机架及永磁吸附履带均为现有技术,或所述永磁吸附履带只需能够通过吸附力在船舶
的壁体上爬行即可,在此不作赘述。
29.所述除锈及污水回收装置,包括清洗罩1、密封垫2、驱动机构和旋转高压水射流系统,所述清洗罩1设有用于安装旋转高压水射流系统的内部容纳空间,所述内部容纳空间的底侧设有一个敞开的开口部,所述旋转高压水射流系统与清洗罩1外部的驱动机构连接,由驱动机构驱动旋转高压水射流系统旋转,从而实现旋转高压水射流系统的喷水除锈工作,所述清洗罩1的侧边还设有与清洗罩1的内部容纳空间相连通的真空管接口19,所述真空管接口19的外接口通过真空管道与真空回收系统连接,从而达到将旋转高压水射流系统清洗船壁面后的锈渣和废水进行及时、干净的回收工作,避免污水流入大海环境污染,所述真空回收系统为现有技术,所述真空回收系统也可以是真空回收泵,它们只需达到将清洗罩1内的污水及与污水混在一起的锈渣吸收干净即可。
30.所述清洗罩1的开口部的边沿上设有密封垫2,所述密封垫2为环状的硅胶圈,所述密封垫2通过环形凹槽3与清洗罩1的开口部的边沿设置的环形凸缘4相互卡合固定设置,所述清洗罩1通过开口部的密封垫2与船舶的壁面相互贴合,使得清洗罩1的内部容纳空间形成一个密封的真空空间。
31.所述清洗罩1的外侧设有弹性调节机构,所述弹性调节机构包括支撑架5、伸缩杆6、伸缩弹簧7和万向轮8,所述支撑架5一端与清洗罩1的侧边连接固定,另一端远离清洗罩1并与伸缩杆6的顶端可伸缩性垂直连接,伸缩杆6的底端与万向轮8连接,所述伸缩杆6中套设有伸缩弹簧7,所述伸缩弹簧7的顶端与支撑架5固定连接,下端与万向轮8的转向座连接,所述弹性调节机构能够保证除锈机器人具有越障能力,因为船舶的壁面会有许多焊瘤、焊缝等障碍,弹性调节机构可以使除锈机器人平稳地越过障碍,提高机器人的稳定性,同时还可使清洗罩1紧紧地贴在船舶壁面上,以达到真空的环境。
32.所述弹性调节机构设有四个,且分别相互对称设置在清洗罩1的外侧。
33.所述旋转高压水射流系统,包括旋转轴9、六通阀10和喷嘴11,所述旋转轴9通过轴承12与清洗罩1的顶侧的中心轴孔13转动性连接,所述旋转轴9的顶端与驱动机构连接,底端通过六通阀10均匀设有六个喷嘴11,所述六个喷嘴11均为环绕六通阀10设置,所述旋转轴9通过顶端接口与入水接管20的底端转性连接,所述入水接管20的顶端与高压水管连接,所述高压水管与地面的高压泵组连接,所述旋转轴9与入水接管20之间设有密封圈。
34.所述驱动机构,包括电机14、电机座15、电机齿轮16和旋转轴齿轮17,所述电机14通过电机座15设在清洗罩1的顶侧,所述电机14的输出轴上设有电机齿轮16,所述电机齿轮16与旋转轴齿轮17相啮合,所述旋转轴齿轮17通过旋转轴9与入水接管20转动性连接,所述入水接管20通过入水接管架18设在电机座15上,所述电机14通过电机齿轮16带动旋转轴齿轮17转动,旋转轴齿轮17带动旋转轴9转动,旋转轴9通过六通阀10带动喷嘴11旋转,通过六个喷嘴11旋转喷射的高压水流来达到给船舶的壁面进行除锈的功能。
35.所述清洗罩1分为上、下级罩体,所述上级罩体的体积小于下级罩体的体积,上、下级罩体连接后形成上小下大的台阶式设置,所述真空管接口19设在上级罩体中。
36.本发明的操作及控制方式是:
37.1)采用船舶壁面以及除锈清洗工艺,结合虚拟制造技术,在solidworks中设计组装船舶除锈机器人三维模型,对所建立的模型添加约束,使模型能够按照所要求的方式运动。
38.2)运用solidworks软件对船舶除锈机器人路径进行离线规划,并通过仿真加工进行验证,从而达到指导实际生产目的。
39.3)船舶壁面除锈的动作步骤:船舶除锈机器人从船舶壁面上的某点开始,按照“之”字形轨迹,通过旋转轴的高压水管连接着六个喷嘴实现的旋转高压水射流完成除锈工作,不断重复“之”字形轨迹,直到船舶壁面除锈完成为止。
40.本发明的技术参数为:
41.一、工作期间,船舶除锈机器人的移动速度不小于80mm/s;
42.二、旋转高压水射流系统的清洗工作宽度为350mm;
43.三、船舶除锈机器人的自身质量小于135kg;
44.四、船舶除锈机器人爬壁时携带最大负载为90kg;
45.五、船舶除锈机器人的越障高度为30mm;
46.六、船舶除锈机器人的遥控距离不小于150mm。
47.综上,本发明所选取上述实施例并对其进行了详细的说明和描述,主要是为了更好的说明本发明的技术方案,并不是想要局限于所示的细节。本领域的技术人员对本发明的技术方案所做的任何修改或同等替换,而不脱离本发明技术方案的宗旨和范围的,均应涵盖在本发明的权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1