一种基于大数据网络的医疗器械智能清洗系统
1.本发明涉及智能清洗技术领域,尤其涉及一种基于大数据网络的医疗器械智能清洗系统。
背景技术:
2.医疗器械是指在医疗过程中所使用的各种设备和器具,其中需要经常清洗表面的包括各类手术刀、手术钳等,对于这些需要经常清洁表面的医疗器械现阶段主要还是通过人工进行清洗,但是这些医疗器械较为锋利或者尖锐,因此在清洗的过程中,容易划伤或者扎伤操作人员,而且现有使用的清洗设备集成度低,清洗烘干等过程需要用到不同的设备,需要人工来进行医疗器械的转运,清洗过程智能化程度不高,因此对操作人员的时间占用较大,清洗效果也不甚理想。
技术实现要素:
3.为此,本发明提供一种基于大数据网络的医疗器械智能清洗系统,用以克服现有技术中医疗器械清洗设备不能基于手术情况及清洗设备情况智能化清洗的技术问题。
4.为实现上述目的,本发明提供一种基于大数据网络的医疗器械智能清洗系统,包括,
5.数据库,其设置在云端,所述数据库内设有医疗器械清洗的相关数据;
6.清洗筐,用以盛放待清洗医疗器械,所述清洗筐上设置有提升孔;
7.悬挂轨道,其用以对待清洗的医疗器械进行输送,所述悬挂轨道上设置有抓取装置,所述抓取装置能够通过抓取提升孔对清洗筐进行提升,所述抓取装置上设置有拉力传感器,能够检测待清洗器械质量;
8.初始台,其用以放置清洗筐,所述初始台的一侧设有控制面板,所述控制面板内设有中控模块,所述中控模块与所述数据库相连;
9.煮沸单元,其与所述初始台相邻,用以对医疗器械进行煮沸消毒;
10.喷洗单元,其与所述煮沸单元相连,用以对医疗器械进行喷洗,去除器械表面大块/易清除附着物;
11.超声清洗单元,其与所述喷洗单元相连,用以对医疗器械进行超声清洗,去除器械表面不易清除附着物,在超声清洗时加入生物酶,以对不易清除附着物进行生物分解;
12.漂洗单元,其与所述喷洗单元相连,用以对医疗器械进行喷洗,去除器械表面附着的超声清洗液;
13.烘干单元,其与所述喷洗单元相连,用以对漂洗后的医疗器械进行烘干;
14.报警装置,当智能清洗过程中出现异常状况时,用以报警;
15.当采用所述智能清洗系统进行医疗器械清洗前,医务人员通过控制面板输入医疗器械参与的手术类型、病人的特征、器械清洗数量,所述中控模块将手术类型、病人的特征与所述数据库内公布的数据进行对比,判定医疗器械是否需要进行煮沸消毒;
16.当医疗器械需要进行煮沸消毒时,所述中控模块根据手术类型、病人的特征确定煮沸消毒时长;
17.当所述喷洗单元对医疗器械进行喷洗时,根据器械清洗数量与器械质量对喷洗时长进行调节,在初次喷洗完成后,检测医疗器械表面是否有附着物残留,在存有附着物时,喷洗单元对医疗器械进行补偿喷洗;
18.在喷洗完成后,所述中控模块根据所述喷洗单元的喷洗总时长对所述超声清洗单元的超声清洗时长和生物酶加入量进行调节。
19.进一步地,所述煮沸单元包括,
20.煮沸池,用以对有需要煮沸的医疗器械进行煮沸;
21.加热器,用以对煮沸池内的液体进行加热煮沸;
22.所述数据库内设有手术类型矩阵a0(a1,a2,a3,a4),其中,a1为第一预设手术类型,a2为第二预设手术类型,a3为第三预设手术类型,a4为第四预设手术类型,第一预设手术类型a1和第二预设手术类型a2为具有感染性手术,第三预设手术类型a3和第四预设手术类型a4为不具有感染性手术;
23.所述数据库内还设有病人特殊体征矩阵b0(b1,b2,b3,b4),其中,b1为第一预设特殊体征,b2为第二预设特殊体征,b3为第三预设特殊体征,b4为第四预设特殊体征;第一预设特殊体征b1与第二预设特殊体征b2为具有感染性体征;第三预设特殊体征b3与第四预设特殊体征b4为不具有感染性体征;
24.当采用所述智能清洗系统清洗医疗器械前,将待清洗的医疗器械放入清洗筐内,通过控制面板选取待清洗器械参与的手术类型ai与病人特殊体征bj,其中,i=1,2,3,4,j=1,2,3,4;
25.所述中控模块将手术类型ai与手术类型矩阵a0内手术类型进行对比,当手术类型ai为a1或a2时,中控模块判定手术器械需要进行煮沸;
26.所述中控模块将病人特殊体征bj与病人特殊体征矩阵b0内的体征进行对比,当病人特殊体征bj为b1或b2时,中控模块判定手术器械需要进行煮沸;
27.当手术类型ai为a3或a4,且病人的特殊体征不包含b1或b2时,中控模块判定手术器械不需要进行煮沸;
28.当待清洗的手术器械需要煮沸时,中控模块根据手术类型或病人特殊体征确定煮沸时长。
29.进一步地,所述数据库内设有煮沸时长矩阵t0,t0(t11,t12,t21,t22),其中,t11为第一预设手术类型a1对应煮沸时长,t12为第二预设手术类型a2对应煮沸时长,t21为第一预设特殊体征b1对应煮沸时长,t22为第二预设特殊体征b2对应煮沸时长;
30.当待清洗器械仅因第p预设手术类型ap进行煮沸时,p=1,2,所述中控模块判定煮沸时长为t1p;
31.当待清洗器械仅因第q预设特殊体征bq进行煮沸时,q=1,2,所述中控模块判定煮沸时长为t2q;
32.当病人的特殊体征同时包含第一预设特殊体征b1、第二预设特殊体征b2,且手术类型为a3或a4时,所述中控模块将t21与t22进行对比,选取t21与t22中大的数值作为煮沸时长;
33.当待清洗器械因第p预设手术类型ap与第q预设特殊体征bq共同作用进行煮沸时,所述中控模块判定煮沸时长为tz,tz=(t1p+t2q)
×
d,其中,d为煮沸时长补偿参数;
34.当病人的特殊体征同时包含b1、b2,且手术类型为ap时,所述中控模块将t21与t22进行对比,选取t21与t22中大的数值作为t2q;
35.当所述中控模块确定医疗器械煮沸时长后,中控模块控制所述抓取装置对盛放有待清洗医疗器械的清洗筐进行抓取,抓取完成后,抓取装置沿所述悬挂轨道移动,并将清洗筐放入所述煮沸池。
36.进一步地,所述喷洗单元包括,
37.载放台,用以放置所述清洗筐;
38.滤水网,其设置在所述载放台下,用以引导清洗污水与器械上附着物的流向;
39.排污管,用以排放清洗污水与附着物;
40.摄像装置,其设置在所述喷洗单元顶部,用以检测医疗器械上的附着物是否清洗彻底,并检测在喷洗过程中有无医疗器械被冲出所述清洗筐,摄像装置包含两个摄像头,当检测到医疗器械上的附着物未清洗彻底时,所述中控模块能够根据两个摄像头采集到的图像判定附着物所在位置;
41.喷头,其设置在所述喷洗单元侧壁与顶部,喷头能够喷射水柱以对医疗器械进行喷洗,所述喷头底部设有角度调节装置,角度调节装置能够调节喷头喷水的角度,所述喷头数量不少于6个;
42.当医疗器械完成煮沸消毒或所述中控模块判定医疗器械不需进行煮沸消毒时,中控模块控制所述抓取装置对所述清洗筐进行抓取,抓取完成后,抓取装置沿所述悬挂轨道移动,并将清洗筐放置在所述载放台上;
43.所述数据库内设有标准喷洗时长tp、标准喷洗质量gp和标准喷洗件数jp
44.在所述抓取装置对所述清洗筐进行抓取的过程中,所述拉力传感器检测待喷洗的医疗器械的质量g,并将检测结果传递至所述中控模块,中控模块将检测到的质量g与标准喷洗质量gp进行对比:
45.当g≤gp时,所述中控模块判定不因医疗器械质量调节喷洗时长;
46.当g>gp时,所述中控模块判定因医疗器械质量调节喷洗时长;
47.在将待清洗的医疗器械放入清洗筐内后,通过控制面板选取待清洗器械的清洗数量j,中控模块将输入数量j与标准喷洗件数jp进行对比,
48.当j≤jp时,所述中控模块判定不因医疗器械数量调节喷洗时长;
49.当j>jp时,所述中控模块判定因医疗器械数量调节喷洗时长。
50.进一步地,当所述抓取装置将所述清洗筐放置在所述载放台上后,所述中控模块控制各所述喷头对清洗筐内的医疗器械进行喷洗,在喷洗单元对医疗器械进行喷洗时,各所述喷头的喷射角度随所述角度调节装置匀速变化,喷洗单元对医疗器械的喷洗时长为tpz;
51.当所述中控模块判定不因医疗器械质量调节喷洗时长且中控模块判定不因医疗器械数量调节喷洗时长时,tpz=tp;
52.当所述中控模块判定不因医疗器械质量调节喷洗时长且中控模块判定因医疗器械数量调节喷洗时长时,tpz=tp
×
[1+(j
‑
jp)
×
e],其中,e为医疗器械数量对喷洗时长调
节参数;
[0053]
当所述中控模块判定因医疗器械质量调节喷洗时长且中控模块判定不因医疗器械数量调节喷洗时长时,tpz=tp
×
[1+(g
‑
gp)
×
f],其中,f为医疗器械质量对喷洗时长调节参数;
[0054]
当所述中控模块判定因医疗器械质量调节喷洗时长且中控模块判定因医疗器械数量调节喷洗时长时,tpz=tp
×
[1+(j
‑
jp)
×
e+(g
‑
gp)
×
f]。
[0055]
进一步地,在所述喷洗单元完成时长为tpz的喷洗后,所述摄像装置检测所述清洗筐内的医疗器械表面是否存有附着物,
[0056]
当医疗器械表面不存在附着物时,所述中控模块判定医疗器械喷洗完成;
[0057]
当医疗器械表面存在附着物时,所述中控模块控制各所述喷头对器械进行补偿喷洗,补偿喷洗过程中,中控模块控制所述角度调节装置调节喷头角度,对含有附着物区域重点喷洗,补偿喷洗时长为tb;
[0058]
当医疗器械表面不存在附着物时,所述摄像装置检测载放台上是否存有在喷洗过程中被冲出所述清洗筐的医疗器械,当存有时,所述中控模块控制所述报警装置发出警报。
[0059]
进一步地,所述超声清洗单元包括,
[0060]
超声波清洗池,用以盛放超声波清洗液;
[0061]
振动板,其与所述超声波清洗池相连,用以带动超声波清洗池内的超声波清洗液进行超声振动;
[0062]
生物酶存放罐,其与所述超声波清洗池相连,用以存放生物酶;
[0063]
所述数据库内设有超声清洗标准时长tc和生物酶标准加入量hc,所述中控模块根据所述喷洗单元的喷洗总时长tzp对超声清洗时长和生物酶加入量进行调节,
[0064]
当喷洗单元未进行补偿喷洗时,tzp=tpz;
[0065]
当喷洗单元进行补偿喷洗时,tzp=tpz+tb
×
n,n为补偿喷洗次数;
[0066]
所述中控模块将超声清洗时长调节为tcz,tcz=tc+tzp
÷
tp
×
a,其中,a为喷洗单元的喷洗总时长对超声清洗时长调节参数;
[0067]
所述中控模块将生物酶加入量调节为hcz,hcz=hc+tzp
÷
tp
×
b,其中,b为喷洗单元的喷洗总时长对生物酶加入量调节参数;
[0068]
当所述中控模块判定医疗器械喷洗完成后,中控模块控制所述抓取装置对所述清洗筐进行抓取,抓取完成后,抓取装置沿所述悬挂轨道移动,并将清洗筐放入所述超声波清洗池,中控模块控制所述生物酶存放罐向超声波清洗池内加入hcz的生物酶并控制所述振动板启动,以对医疗器械进行超声清洗,超声清洗时长为tcz。
[0069]
进一步地,所述漂洗单元包括,
[0070]
漂洗台,用以放置所述清洗筐;
[0071]
漂洗喷头,其设置在所述漂洗单元侧壁,用以清除医疗器械上附着的超声波清洗液,漂洗喷头底部设有角度调节装置,漂洗喷头设置量不少于4个;
[0072]
排水管,用以排放清洗污水;
[0073]
当医疗器械完成超声波清洗后,所述中控模块控制所述抓取装置对所述清洗筐进行抓取,抓取完成后,抓取装置沿所述悬挂轨道移动,并将清洗筐放置在所述漂洗台上,中控模块控制所述漂洗喷头对清洗筐内的医疗器械进行漂洗,去除医疗器械表面附着的超声
波清洗液,漂洗时长为tq。
[0074]
进一步地,所述烘干单元包括,
[0075]
烘干台,用以放置所述清洗筐,所述烘干台为蜂窝结构,便于空气流通;
[0076]
进风口,其设置在所述烘干单元顶部,用以将无菌风引入至所述烘干单元;
[0077]
加热装置,其设置在所述进风口,用以对引入的无菌风进行加热;
[0078]
出风口,其设置在所述烘干单元底部,用以排出烘干单元内部空气;
[0079]
红外检测装置,其设置在所述烘干单元侧壁,用以对医疗器械进行检测判定是否烘干完成;
[0080]
所述数据库内设有标准烘干吹风时间tf;
[0081]
当医疗器械完成漂洗后,所述中控模块控制所述抓取装置对所述清洗筐进行抓取,抓取完成后,抓取装置沿所述悬挂轨道移动,并将清洗筐放置在所述烘干台上,中控模块控制所述进风口启动,引入无菌风对医疗器械进行风吹,同时,中控模块控制所述加热装置启动,加热无菌风,进风口吹风时长为tf;
[0082]
当经过吹风时长tf后,所述中控模块控制所述进风口停止工作,在进风口停止工作时长达到tk时,所述红外检测装置采集医疗器械的红外图像,判定是否烘干完成。
[0083]
进一步地,在进风口停止工作时长达到tk时,所述红外检测装置采集医疗器械的红外图像,并将检测结果传递至所述中控模块,中控模块对红外图像进行分析,
[0084]
当红外图像内的医疗器械存有不规则温度突变区域时,所述中控模块判定医疗器械烘干未完成;
[0085]
当红外图像内的医疗器械不存在不规则温度突变区域时,所述中控模块判定医疗器械烘干完成;
[0086]
当所述中控模块判定医疗器械烘干未完成时,中控模块控制所述进风口与所述加热装置启动,对医疗器械进行补偿烘干,补偿时长为tfb。
[0087]
与现有技术相比,本发明的有益效果在于,本发明设置数据库,数据库内设有医疗器械清洗的相关数据,通过设置数据库,使清洗设备与互联网相连,在进行医疗器械清洗时,医务人员仅需通过控制面板输入手术类型,病人体征,器械数量等信息即可从数据库中获取对应的清洗模式,同时,在设备端设置有中控模块能够实时根据实际的情况对当前的清洗状态进行智能调整,增加了医疗设备清洗的智能性,保证了清洗的质量,进一步地,本发明还对多个清洗环节进行整合,增加了清洗设备的集成度,减少了清洗设备占地大的问题。中控模块还能够将实际的清洗情况与数据库数据进行对接,实时更新数据库信息,进一步地增加了医疗设备清洗的智能性。
[0088]
尤其,当采用所述智能清洗系统清洗医疗器械前,将待清洗的医疗器械放入清洗筐内,通过控制面板选取待清洗器械参与的手术类型ai与病人特殊体征bj,所述中控模块将手术类型ai与手术类型矩阵a0内手术类型进行对比,将病人特殊体征bj与病人特殊体征矩阵b0内的体征进行对比,通过数据库信息判定医疗器械是否需要进行煮沸消毒,降低人员选择操控的失误概率,增加了清洗人员的安全防护,同时,通过与数据库信息进行对比,加快了清洗的效率。
[0089]
尤其,通过手术类型与病人体征确定煮沸消毒的时长,为医疗器械的彻底消毒打下基础,进一步降低人员选择操控的失误概率,增加了清洗人员的安全防护,当器械可能含
有多项感染源时,设置煮沸时长补偿参数,智能延长煮沸消毒时长,增加了清洗人员的安全防护的同时保障了器械的彻底消毒。
[0090]
进一步地,在所述抓取装置对所述清洗筐进行抓取的过程中,所述拉力传感器检测待喷洗的医疗器械的质量g,并将检测结果传递至所述中控模块,中控模块将检测到的质量g与标准喷洗质量gp进行对比,在将待清洗的医疗器械放入清洗筐内后,通过控制面板选取待清洗器械的清洗数量j,中控模块将输入数量j与标准喷洗件数jp进行对比,根据医疗器械的数量与质量智能调节喷洗时长,保障了对附着物的彻底清除,在保障清洗质量的同时,加快了清洗效率。
[0091]
尤其,当待清洗器械质量大时,清洗面较大,合理延长喷洗时长,保障了对附着物的彻底清除,同时,当器械数量多时,粘有附着物的几率也随之增大,合理延长喷洗时长,保障了对附着物的彻底清除。
[0092]
进一步地,当医疗器械表面存在附着物时,所述中控模块控制各所述喷头对器械进行补偿喷洗,补偿喷洗过程中,中控模块控制所述角度调节装置调节喷头角度,对含有附着物区域重点喷洗,在预设的喷洗时长结束后,对器械进行检测,并对存有附着物的位置进行补偿喷洗,保障了附着物的清洗彻底,提升医疗器械的清洗质量。
[0093]
进一步地,所述数据库内设有超声清洗标准时长tc和生物酶标准加入量hc,所述中控模块根据所述喷洗单元的喷洗总时长tzp对超声清洗时长和生物酶加入量进行调节,喷洗时长长,说明清洗面多,附着物多,根据喷洗时长对超声清洗时长和生物酶加入量进行调节,保障了医疗器械上的小块附着物的清除彻底,提升医疗器械的清洗质量。
[0094]
进一步地,当医疗器械完成漂洗后,所述中控模块控制所述抓取装置对所述清洗筐进行抓取,抓取完成后,抓取装置沿所述悬挂轨道移动,并将清洗筐放置在所述烘干台上,中控模块控制所述进风口启动,引入无菌风对医疗器械进行风吹,同时,中控模块控制所述加热装置启动,加热无菌风,进风口吹风时长为tf;当经过吹风时长tf后,所述中控模块控制所述进风口停止工作,在进风口停止工作时长达到tk时,所述红外检测装置采集医疗器械的红外图像,判定是否烘干完成。在烘干完成后对医疗器械进行红外检测,在医疗器械上存有水滴时,受蒸发影响,红外成像的图像上会出现不规则温度突变区域,当红外图像内的医疗器械存有不规则温度突变区域时,中控模块控制所述进风口与所述加热装置启动,对医疗器械进行补偿烘干,防止医疗器材上存有水滴,保证可清洗质量的同时降低了医疗器械沾染细菌的风险,,提升医疗器械的清洗质量。
附图说明
[0095]
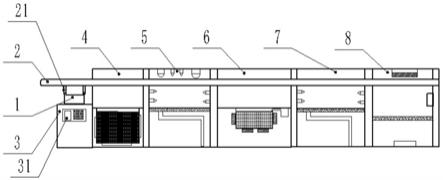
图1为本发明所述基于大数据网络的医疗器械智能清洗系统的外部结构示意图;
[0096]
图2为本发明所述基于大数据网络的医疗器械智能清洗系统的结构示意图;
[0097]
图3为本发明所述煮沸单元结构示意图;
[0098]
图4为本发明所述喷洗单元结构示意图;
[0099]
图5为本发明所述超声清洗单元结构示意图;
[0100]
图6为本发明所述漂洗单元结构示意图;
[0101]
图7为本发明所述烘干单元结构示意图。
具体实施方式
[0102]
为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
[0103]
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
[0104]
需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
[0105]
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
[0106]
请参阅图1与图2所示,其中,图1为本发明所述基于大数据网络的医疗器械智能清洗系统的外部结构示意图,图2为本发明所述基于大数据网络的医疗器械智能清洗系统的结构示意图。
[0107]
本发明提供一种基于大数据网络的医疗器械智能清洗系统,包括,
[0108]
数据库(图中未画出),其设置在云端,所述数据库内设有医疗器械清洗的相关数据;
[0109]
清洗筐1,用以盛放待清洗医疗器械,所述清洗筐1上设置有提升孔(图中未画出);
[0110]
悬挂轨道2,其用以对待清洗的医疗器械进行输送,所述悬挂轨道2上设置有抓取装置21,所述抓取装置21能够通过抓取提升孔对清洗筐1进行提升,所述抓取装置21上设置有拉力传感器(图中未画出),能够检测待清洗器械质量;
[0111]
初始台3,其用以放置清洗筐1,所述初始台3的一侧设有控制面板31,所述控制面板31内设有中控模块(图中未画出),所述中控模块与所述数据库相连;
[0112]
煮沸单元4,其与所述初始台3相邻,用以对医疗器械进行煮沸消毒;
[0113]
喷洗单元5,其与所述煮沸单元4相连,用以对医疗器械进行喷洗,去除器械表面大块/易清除附着物;
[0114]
超声清洗单元6,其与所述喷洗单元5相连,用以对医疗器械进行超声清洗,去除器械表面不易清除附着物,在超声清洗时加入生物酶,以对不易清除附着物进行生物分解;
[0115]
漂洗单元7,其与所述喷洗单元5相连,用以对医疗器械进行喷洗,去除器械表面附着的超声清洗液;
[0116]
烘干单元8,其与所述喷洗单元5相连,用以对漂洗后的医疗器械进行烘干;
[0117]
报警装置(图中未画出),当智能清洗过程中出现异常状况时,用以报警;
[0118]
当采用所述智能清洗系统进行医疗器械清洗前,医务人员通过控制面板31输入医疗器械参与的手术类型、病人的特征、器械清洗数量,所述中控模块将手术类型、病人的特征与所述数据库内公布的数据进行对比,判定医疗器械是否需要进行煮沸消毒;
[0119]
当医疗器械需要进行煮沸消毒时,所述中控模块根据手术类型、病人的特征确定
煮沸消毒时长;
[0120]
当所述喷洗单元5对医疗器械进行喷洗时,根据器械清洗数量与器械质量对喷洗时长进行调节,在初次喷洗完成后,检测医疗器械表面是否有附着物残留,在存有附着物时,喷洗单元5对医疗器械进行补偿喷洗;
[0121]
在喷洗完成后,所述中控模块根据所述喷洗单元5的喷洗总时长对所述超声清洗单元6的超声清洗时长和生物酶加入量进行调节。
[0122]
通过设置数据库,使清洗设备与互联网相连,在进行医疗器械清洗时,医务人员仅需通过控制面板31输入手术类型,病人体征,器械数量等信息即可从数据库中获取对应的清洗模式,同时,在设备端设置有中控模块能够实时根据实际的情况对当前的清洗状态进行智能调整,增加了医疗设备清洗的智能性,保证了清洗的质量,进一步地,本发明还对多个清洗环节进行整合,增加了清洗设备的集成度,减少了清洗设备占地大的问题。中控模块还能够将实际的清洗情况与数据库数据进行对接,实时更新数据库信息,进一步地增加了医疗设备清洗的智能性。
[0123]
请继续参阅图3所示,图3为本发明所述煮沸单元结构示意图。
[0124]
具体而言,所述煮沸单元4包括,
[0125]
煮沸池41,用以对有需要煮沸的医疗器械进行煮沸;
[0126]
加热器42,用以对煮沸池41内的液体进行加热煮沸;
[0127]
所述数据库内设有手术类型矩阵a0(a1,a2,a3,a4),其中,a1为第一预设手术类型,a2为第二预设手术类型,a3为第三预设手术类型,a4为第四预设手术类型,第一预设手术类型a1和第二预设手术类型a2为具有感染性手术,第三预设手术类型a3和第四预设手术类型a4为不具有感染性手术;
[0128]
在本实施例中,a1为肿瘤根治手术,a2为结核病灶清楚手术,a3为关节置换手术,a4为扁桃体切除手术;
[0129]
所述数据库内还设有病人特殊体征矩阵b0(b1,b2,b3,b4),b1为第一预设特殊体征,b2为第二预设特殊体征,b3为第三预设特殊体征,b4为第四预设特殊体征;第一预设特殊体征b1与第二预设特殊体征b2为具有感染性体征;第三预设特殊体征b3与第四预设特殊体征b4为不具有感染性体征;
[0130]
在本实施例中,b1为传染性肝病,b2为梅毒,b3为高血压,b4为高血脂,
[0131]
当采用所述智能清洗系统清洗医疗器械前,将待清洗的医疗器械放入清洗筐1内,通过控制面板31选取待清洗器械参与的手术类型ai与病人特殊体征bj,i=1,2,3,4,j=1,2,3,4;
[0132]
所述中控模块将手术类型ai与手术类型矩阵a0内手术类型进行对比,当手术类型ai为a1或a2时,中控模块判定手术器械需要进行煮沸;
[0133]
所述中控模块将病人特殊体征bj与病人特殊体征矩阵b0内的体征进行对比,当病人特殊体征bj为b1或b2时,中控模块判定手术器械需要进行煮沸;
[0134]
当手术类型ai为a3或a4,且病人的特殊体征不包含b1或b2时,中控模块判定手术器械不需要进行煮沸;
[0135]
当待清洗的手术器械需要煮沸时,中控模块根据手术类型或病人特殊体征确定煮沸时长。
[0136]
通过数据库信息判定医疗器械是否需要进行煮沸消毒,降低人员选择操控的失误概率,增加了清洗人员的安全防护,同时,通过与数据库信息进行对比,加快了清洗的效率。
[0137]
具体而言,所述数据库内设有煮沸时长矩阵t0(t11,t12,t21,t22),其中,t11为第一预设手术类型a1对应煮沸时长,t12为第二预设手术类型a2对应煮沸时长,t21为第一预设特殊体征b1对应煮沸时长,t22为第二预设特殊体征b2对应煮沸时长;
[0138]
当待清洗器械仅因第p预设手术类型ap进行煮沸时,p=1,2,所述中控模块判定煮沸时长为t1p;
[0139]
当待清洗器械仅因第q预设特殊体征bq进行煮沸时,q=1,2,所述中控模块判定煮沸时长为t2q;
[0140]
当病人的特殊体征同时包含第一预设特殊体征b1、第二预设特殊体征b2,且手术类型为a3或a4时,所述中控模块将t21与t22进行对比,选取t21与t22中大的数值作为煮沸时长;
[0141]
当待清洗器械因第p预设手术类型ap与第q预设特殊体征bq共同作用进行煮沸时,所述中控模块判定煮沸时长为tz,tz=(t1p+t2q)
×
d,其中,d为煮沸时长补偿参数;
[0142]
当病人的特殊体征同时包含b1、b2,且手术类型为ap时,所述中控模块将t21与t22进行对比,选取t21与t22中大的数值作为t2q;
[0143]
当所述中控模块确定医疗器械煮沸时长后,中控模块控制所述抓取装置21对盛放有待清洗医疗器械的清洗筐1进行抓取,抓取完成后,抓取装置21沿所述悬挂轨道2移动,并将清洗筐1放入所述煮沸池41。
[0144]
在本实施例中,t11=15min,t12=20min,t21=22min,t22=20min,d=0.8。
[0145]
通过手术类型与病人体征确定煮沸消毒的时长,为医疗器械的彻底消毒打下基础,进一步降低人员选择操控的失误概率,增加了清洗人员的安全防护,当器械可能含有多项感染源时,设置煮沸时长补偿参数,智能延长煮沸消毒时长,增加了清洗人员的安全防护的同时保障了器械的彻底消毒。
[0146]
请继续参阅图4所示,图4为本发明所述喷洗单元结构示意图。具体而言,所述喷洗单元5包括,
[0147]
载放台51,用以放置所述清洗筐1;
[0148]
滤水网52,其设置在所述载放台51下,用以引导清洗污水与器械上附着物的流向;
[0149]
排污管53,用以排放清洗污水与附着物;
[0150]
摄像装置54,其设置在所述喷洗单元5顶部,用以检测医疗器械上的附着物是否清洗彻底,并检测在喷洗过程中有无医疗器械被冲出所述清洗筐1,摄像装置54包含两个摄像头,当检测到医疗器械上的附着物未清洗彻底时,所述中控模块能够根据两个摄像头采集到的图像判定附着物所在位置;
[0151]
喷头55,其设置在所述喷洗单元5侧壁与顶部,喷头55能够喷射水柱以对医疗器械进行喷洗,所述喷头55底部设有角度调节装置56,角度调节装置56能够调节喷头55喷水的角度,所述喷头55数量不少于6个;
[0152]
当医疗器械完成煮沸消毒或所述中控模块判定医疗器械不需进行煮沸消毒时,中控模块控制所述抓取装置21对所述清洗筐1进行抓取,抓取完成后,抓取装置21沿所述悬挂轨道2移动,并将清洗筐1放置在所述载放台51上;
[0153]
所述数据库内设有标准喷洗时长tp、标准喷洗质量gp和标准喷洗件数jp
[0154]
在所述抓取装置21对所述清洗筐1进行抓取的过程中,所述拉力传感器检测待喷洗的医疗器械的质量g,并将检测结果传递至所述中控模块,中控模块将检测到的质量g与标准喷洗质量gp进行对比:
[0155]
当g≤gp时,所述中控模块判定不因医疗器械质量调节喷洗时长;
[0156]
当g>gp时,所述中控模块判定因医疗器械质量调节喷洗时长;
[0157]
在将待清洗的医疗器械放入清洗筐1内后,通过控制面板31选取待清洗器械的清洗数量j,中控模块将输入数量j与标准喷洗件数jp进行对比,
[0158]
当j≤jp时,所述中控模块判定不因医疗器械数量调节喷洗时长;
[0159]
当j>jp时,所述中控模块判定因医疗器械数量调节喷洗时长。
[0160]
在本实施例中,tp=30min,gp=1.5kg,jp=15。
[0161]
根据医疗器械的数量与质量智能调节喷洗时长,保障了对附着物的彻底清除,在保障清洗质量的同时,加快了清洗效率。
[0162]
具体而言,当所述抓取装置21将所述清洗筐1放置在所述载放台51上后,所述中控模块控制各所述喷头55对清洗筐1内的医疗器械进行喷洗,在喷洗单元5对医疗器械进行喷洗时,各所述喷头55的喷射角度随所述角度调节装置56匀速变化,喷洗单元5对医疗器械的喷洗时长为tpz;
[0163]
当所述中控模块判定不因医疗器械质量调节喷洗时长且中控模块判定不因医疗器械数量调节喷洗时长时,tpz=tp;
[0164]
当所述中控模块判定不因医疗器械质量调节喷洗时长且中控模块判定因医疗器械数量调节喷洗时长时,tpz=tp
×
[1+(j
‑
jp)
×
e],其中,e为医疗器械数量对喷洗时长调节参数;
[0165]
当所述中控模块判定因医疗器械质量调节喷洗时长且中控模块判定不因医疗器械数量调节喷洗时长时,tpz=tp
×
[1+(g
‑
gp)
×
f],其中,f为医疗器械质量对喷洗时长调节参数;
[0166]
当所述中控模块判定因医疗器械质量调节喷洗时长且中控模块判定因医疗器械数量调节喷洗时长时,tpz=tp
×
[1+(j
‑
jp)
×
e+(g
‑
gp)
×
f]。
[0167]
在本实施例中,e=0.25,f=0.2/kg。
[0168]
当待清洗器械质量大时,清洗面较大,合理延长喷洗时长,保障了对附着物的彻底清除,同时,当器械数量多时,粘有附着物的几率也随之增大,合理延长喷洗时长,保障了对附着物的彻底清除。
[0169]
具体而言,在所述喷洗单元5完成时长为tpz的喷洗后,所述摄像装置54检测所述清洗筐1内的医疗器械表面是否存有附着物,
[0170]
当医疗器械表面不存在附着物时,所述中控模块判定医疗器械喷洗完成;
[0171]
当医疗器械表面存在附着物时,所述中控模块控制各所述喷头55对器械进行补偿喷洗,补偿喷洗过程中,中控模块控制所述角度调节装置56调节喷头55角度,对含有附着物区域重点喷洗,补偿喷洗时长为tb;
[0172]
当医疗器械表面不存在附着物时,所述摄像装置54检测载放台51上是否存有在喷洗过程中被冲出所述清洗筐1的医疗器械,当存有时,所述中控模块控制所述报警装置发出
警报。
[0173]
在本实施例中,tb=5min。
[0174]
在预设的喷洗时长结束后,对器械进行检测,并对存有附着物的位置进行补偿喷洗,保障了附着物的清洗彻底,提升医疗器械的清洗质量。
[0175]
请继续参阅图5所示,图5为本发明所述超声清洗单元结构示意图。具体而言,所述超声清洗单元6包括,
[0176]
超声波清洗池61,用以盛放超声波清洗液;
[0177]
振动板62,其与所述超声波清洗池61相连,用以带动超声波清洗池61内的超声波清洗液进行超声振动;
[0178]
生物酶存放罐63,其与所述超声波清洗池61相连,用以存放生物酶;
[0179]
所述数据库内设有超声清洗标准时长tc和生物酶标准加入量hc,所述中控模块根据所述喷洗单元5的喷洗总时长tzp对超声清洗时长和生物酶加入量进行调节,
[0180]
当喷洗单元5未进行补偿喷洗时,tzp=tpz;
[0181]
当喷洗单元5进行补偿喷洗时,tzp=tpz+tb
×
n,n为补偿喷洗次数;
[0182]
所述中控模块将超声清洗时长调节为tcz,tcz=tc+tzp
÷
tp
×
a,其中,a为喷洗单元5的喷洗总时长对超声清洗时长调节参数;
[0183]
所述中控模块将生物酶加入量调节为hcz,hcz=hc+tzp
÷
tp
×
b,其中,b为喷洗单元5的喷洗总时长对生物酶加入量调节参数;
[0184]
在本实施例中,tc=30min,hc=15ml,a=5min,b=1ml。
[0185]
喷洗时长长,说明清洗面多,附着物多,根据喷洗时长对超声清洗时长和生物酶加入量进行调节,保障了医疗器械上的小块附着物的清除彻底,提升医疗器械的清洗质量。
[0186]
当所述中控模块判定医疗器械喷洗完成后,中控模块控制所述抓取装置21对所述清洗筐1进行抓取,抓取完成后,抓取装置21沿所述悬挂轨道2移动,并将清洗筐1放入所述超声波清洗池61,中控模块控制所述生物酶存放罐63向超声波清洗池61内加入hcz的生物酶并控制所述振动板62启动,以对医疗器械进行超声清洗,超声清洗时长为tcz。
[0187]
请继续参阅图6所示,图6为本发明所述漂洗单元结构示意图。具体而言,所述漂洗单元7包括,
[0188]
漂洗台71,用以放置所述清洗筐1;
[0189]
漂洗喷嘴72,其设置在所述漂洗单元7侧壁,用以清除医疗器械上附着的超声波清洗液,漂洗喷嘴72底部设有角度调节装置56,漂洗喷嘴72设置量不少于4个;
[0190]
排水管73,用以排放清洗污水;
[0191]
当医疗器械完成超声波清洗后,所述中控模块控制所述抓取装置21对所述清洗筐1进行抓取,抓取完成后,抓取装置21沿所述悬挂轨道2移动,并将清洗筐1放置在所述漂洗台71上,中控模块控制所述漂洗喷嘴72对清洗筐1内的医疗器械进行漂洗,去除医疗器械表面附着的超声波清洗液,漂洗时长为tq。
[0192]
在本实施例中,tq=15min。
[0193]
请继续参阅图7所示,图7为本发明所述烘干单元结构示意图。具体而言,所述烘干单元8包括,
[0194]
烘干台81,用以放置所述清洗筐1,所述烘干台81为蜂窝结构,便于空气流通;
[0195]
进风口82,其设置在所述烘干单元8顶部,用以将无菌风引入至所述烘干单元8;
[0196]
加热装置83,其设置在所述进风口82,用以对引入的无菌风进行加热;
[0197]
出风口84,其设置在所述烘干单元8底部,用以排出烘干单元8内部空气;
[0198]
红外检测装置85,其设置在所述烘干单元8侧壁,用以对医疗器械进行检测判定是否烘干完成;
[0199]
所述数据库内设有标准烘干吹风时间tf;
[0200]
当医疗器械完成漂洗后,所述中控模块控制所述抓取装置21对所述清洗筐1进行抓取,抓取完成后,抓取装置21沿所述悬挂轨道2移动,并将清洗筐1放置在所述烘干台81上,中控模块控制所述进风口82启动,引入无菌风对医疗器械进行风吹,同时,中控模块控制所述加热装置83启动,加热无菌风,进风口82吹风时长为tf;
[0201]
当经过吹风时长tf后,所述中控模块控制所述进风口82停止工作,在进风口82停止工作时长达到tk时,所述红外检测装置85采集医疗器械的红外图像,判定是否烘干完成。
[0202]
在本实施例中,tf=15min,tk=1min。
[0203]
在烘干完成后对医疗器械进行红外检测,在医疗器械上存有水滴时,受蒸发影响,红外成像的图像上会出现不规则温度突变区域,当红外图像内的医疗器械存有不规则温度突变区域时,中控模块控制所述进风口82与所述加热装置83启动,对医疗器械进行补偿烘干,防止医疗器材上存有水滴,保证可清洗质量的同时降低了医疗器械沾染细菌的风险,,提升医疗器械的清洗质量。
[0204]
具体而言,在进风口82停止工作时长达到tk时,所述红外检测装置85采集医疗器械的红外图像,并将检测结果传递至所述中控模块,中控模块对红外图像进行分析,
[0205]
当红外图像内的医疗器械存有不规则温度突变区域时,所述中控模块判定医疗器械烘干未完成;
[0206]
当红外图像内的医疗器械不存在不规则温度突变区域时,所述中控模块判定医疗器械烘干完成;
[0207]
当所述中控模块判定医疗器械烘干未完成时,中控模块控制所述进风口82与所述加热装置83启动,对医疗器械进行补偿烘干,补偿时长为tfb。
[0208]
在本实施例中,tfb=5min。
[0209]
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1