一种具备多种上料功能的垃圾压缩机的制作方法
1.本技术涉及垃圾上料技术领域,具体公开了一种具备多种上料功能的 垃圾压缩机。
背景技术:
2.垃圾压缩机基本都采用翻桶上料、翻斗上料以及垃圾收集车对接倒料 三种上料形式,移动式垃圾压缩机一般都配备了上料机构,用以方便快速 的将垃圾转移进入压缩箱内。上料机构一般为翻桶机构和翻斗机构,翻桶 机构能将桶装垃圾快速倾倒进入压缩箱内;翻斗机构利用料斗收集散装垃 圾、手推车及三轮车内垃圾,再通过翻斗动作将垃圾倾倒进入压缩箱内。
3.中国专利(专利号:201921931246.5)公开了一种翻桶机构及移动式 垃圾压缩机,所述翻桶机构设置在箱体前端,包括桶固定架、料斗固定架、 活动料斗和翻转机构,所述活动料斗用于收集零散垃圾,且通过料斗固定 架和设在桶固定架上的活动钩环将其稳定可靠地挂接在桶固定架上。所述 移动式垃圾压缩机包括箱体和所述翻桶机构。本发明通过设置活动料斗收 集零散垃圾,同时所述活动料斗通过挂接在料斗固定架上而与桶固定架连 接,以使翻转机构能对所述活动料斗进行翻转,并通过设置活动钩环保证 活动料斗挂接时的稳定性与可靠性,从而保证安全;所述翻桶机构既能实 现对垃圾桶的自动倒料,又能对零散垃圾进行先收集再自动倒料,方便快 捷。
4.翻桶上料机构与翻斗上料机构在市面上现有设备中已经广泛使用,且 技术也已趋于成熟。但现有垃圾压缩机上料机构存在功能不集中的缺陷, 翻斗式垃圾压缩机只具备翻斗上料功能,无法兼容翻桶上料以及垃圾收集 车对接上料功能;翻桶式垃圾压缩机具备翻桶上料功能以及垃圾收集车对 接倒料功能,但无法兼容翻斗上料功能。中国专利(专利号: 201921931246.5)公开的一种翻桶机构及移动式垃圾压缩机,其在翻桶上 料功能基础上设置有活动斗,可实现翻桶上料、垃圾车对接倒料以及翻斗 倒料功能,但其活动斗未与箱体设置为一整体,使用活动斗时需人工将活 动斗与设备进行对接,使用翻桶上料与垃圾收集车对接倒料功能时需人工 对活动斗进行拆卸,增加了操作人员的工作量,且活动斗与翻桶装置采用 快拆式结构连接,在使用过程中存在跌落的风险,因此,发明人有鉴于此, 提供了一种具备多种上料功能的垃圾压缩机,以便解决上述问题。
技术实现要素:
5.本发明的目的在于解决传统的垃圾压缩机在垃圾上料过程中,不能使 用多种垃圾投放方式的问题。
6.为了达到上述目的,本发明的基础方案提供一种具备多种上料功能的 垃圾压缩机,包括压缩箱以及设置在压缩箱内的压缩机构,压缩箱设有压缩 机构的一侧设有上料机构,上料机构包括对称转动设置在压缩机构两侧的大 臂架以及控制大臂架摆动的举升油缸,大臂架远离压缩机构的一端转动连接 有小臂架,大臂架上对称设有用于控制小臂架摆
动的翻斗油缸,大臂架的自 由端安装有料斗,料斗底部与小臂架之间对称设有用于连接料斗的料斗连杆, 压缩机构靠近料斗一侧转动设有翻桶架,大臂架两侧对称转动可拆卸连接有 与翻桶架自由端铰接的翻桶架连杆,压缩机构两侧对称转动设有用于支撑翻 桶架的支撑机构。
7.本基础方案的原理及效果在于:
8.1、压缩箱存放被压缩机构压缩的垃圾,压缩机构压缩投放的垃圾。
9.2、料斗可直接接住投放在料斗内的垃圾,料斗收集垃圾完成后,翻 斗油缸收回,带动小臂架逆时针旋转,从而通过料斗连杆带动所述料斗以 料斗上的铰点做圆心旋转,完成翻斗上料动作,垃圾由料斗进入所述压缩 箱内,料斗完成翻转,料斗内的垃圾便可顺势落入压缩机构内,最后通过 压缩机构对垃圾进行压缩。
10.3、当需要直接将市政垃圾桶内的垃圾直接投放至压缩机构内时,将 垃圾桶靠近翻桶架放置,举升油缸伸出,带动所述大臂架逆时针旋转,从 而通过翻桶架连杆带动翻桶架运动,由于支撑机构对翻桶架的约束,使得 翻桶架角度发生变化,从而完成翻桶动作,垃圾由垃圾桶进入压缩箱内, 再通过压缩机构对垃圾进行压缩。
11.4、当需要将垃圾车内的垃圾投放至压缩机构时,将活动销轴拆卸, 断开翻桶架连杆与大臂架的连接,此时举升油缸伸出,带动大臂架逆时针 旋转,翻桶架停留在原位,举升油缸伸出到位后,大臂架与料斗逆时针旋 转到位,此时垃圾收集车可与设备投料口对接倒料,垃圾由垃圾收集车进 入压缩箱内,再通过压缩机构对垃圾进行压缩。
12.与现有技术相比,本发明在使用时,同时具备了翻桶上料、翻斗上料 以及垃圾收集车对接上料三种上料功能,且料斗与箱体设置为一整体,省 去人工拆装工序,同时杜绝了翻料过程中料斗跌落的风险,操作简单,可 行性高,便于在本领域中推广使用。
13.进一步,所述支撑机构包括对称转动设置在压缩机构两端的翻桶架上 支撑杆以及翻桶架下支撑杆,翻桶架上支撑杆的自由端与翻桶架中部转动 连接,翻桶架下支撑杆的自由端与翻桶架的下部转动连接。在使用时,将 垃圾桶靠近翻桶架放置,举升油缸伸出,带动大臂架逆时针旋转,从而通 过翻桶架连杆带动翻桶架运动,由于翻桶架上支撑杆与翻桶架下支撑杆对 翻桶架的约束,使得翻桶架角度发生变化,从而完成翻桶动作,垃圾由垃 圾桶进入所述压缩箱内,再通过压缩机构对垃圾进行压缩。
14.进一步,所述压缩箱作为前部开有用于投放垃圾的开口,后端开有用 于垃圾卸料的开口,后端开口处设有用于封堵压缩箱后端的开闭尾门。便 于垃圾的投放和垃圾的回收。
15.进一步,所述压缩机构采用推铲推压结构形式,设置于压缩箱底部。 根据用户需求调整不同的压缩机构。
16.进一步,所述压缩机构采用刮板刮压结构形式,设置于压缩箱顶部。 根据用户需求调整不同的压缩机构。
17.进一步,所述翻桶架连杆与大臂架上的连接处设有活动插销。便于利 用垃圾车投放垃圾时,操作更加便捷。
附图说明
18.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述 中所需要
使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅 是本技术的一些实施例,对于本领域技术人员来讲,在不付出创造性劳动 的前提下,还可以根据这些附图获得其他的附图。
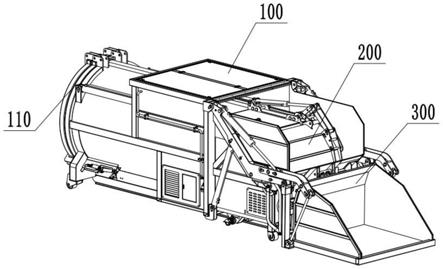
19.图1示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机的结构示意图;
20.图2示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中压缩箱的正视图;
21.图3示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中上料机构的局部正视图;
22.图4示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中大臂架的正视图;
23.图5示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中小臂架的正视图;
24.图6示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中料斗的正视图;
25.图7示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中翻桶架的正视图;
26.图8示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中翻桶架上支撑杆的正视图;
27.图9示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中翻桶架下支撑杆的正视图;
28.图10示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中翻桶架连杆的正视图;
29.图11示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中料斗垃圾投放的步骤图;
30.图12示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中垃圾桶垃圾投放的步骤图;
31.图13示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中垃圾车垃圾投放的步骤图;
32.图14示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中压缩压缩机构使用示意图;
33.图15示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机中图14的局部放大图;
34.图16示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机图14中料斗垃圾投放的步骤图;
35.图17示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机图14中垃圾桶垃圾投放的步骤图;
36.图18示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机图14垃圾车垃圾投放的步骤图;
37.图19示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机图14中压缩箱的局部拆解图;
38.图20示出了本技术实施例提出的一种具备多种上料功能的垃圾压缩 机图的变形局部放大图。
39.具体实施方式
40.为更进一步阐述本发明为实现预定发明目的所采取的技术手段及功 效,以下结合附图及较佳实施例,对依据本发明的具体实施方式、结构、 特征及其功效,详细说明如后。
41.说明书附图中的附图标记包括:压缩箱100、开闭尾门110、第一铰 点101、第二铰点102、第三铰点103、第四铰点104、第五铰点105;
42.压缩机1000、压缩机构200、垃圾箱2000、进料通道2100;
43.上料机构300、大臂架310、大臂架第一铰点311、大臂架第二铰点 312、大臂架第三铰点313、大臂架第四铰点314、大臂架第五铰点315、 大臂架第六铰点316;小臂架320、小臂架第一铰点321、小臂架第二铰 点322、小臂架第三铰点323;料斗330、上铰点331、下铰点332;翻桶 架340、翻桶架上铰点341、翻桶架下铰点342;翻桶架上支撑杆350、翻 桶架上支撑杆第一铰点351、翻桶架上支撑杆第二铰点352;翻桶架下支 撑杆360、翻桶架下支撑杆第一铰点361、翻桶架下支撑杆第二铰点362; 翻桶架连杆370、翻桶架连杆第一铰点371、翻桶架连杆第二铰点372。
44.如图1、图2所示,由压缩箱100、压缩机构200、上料机构300组成。 所述压缩箱100作为垃圾压缩及储存容器,其前部开口,用于垃圾投放,其 后端开口,用于垃圾卸料,并在其后端开口处设置可开闭尾门110,用于封 堵压缩箱100后端开口。所述压缩箱100前部两侧对称设置有第一铰点101、 第二铰点102、第三铰点103、第四铰点104。所述压缩机构200作为垃圾压 缩部件,可设置于所述压缩箱100底部,采用推压方式对垃圾进行压缩,也 可设置于所述压缩箱100顶部,采用刮压方式对垃圾进行压缩。
45.本案的第一种实施例:
46.参照图3,上料机构300包括举升油缸301、翻斗油缸302、大臂架310、 小臂架320、料斗330、料斗连杆303、翻桶架340、翻桶架上支撑杆350、 翻桶架下支撑杆360、翻桶架连杆370、活动销轴304。
47.参照图4,大臂架310上设置有第一铰点311、第二铰点312、第三铰点 313、第四铰点314、第五铰点315、第六铰点316。
48.参照图5,小臂架320上设置有第一铰点321、第二铰点322、第三铰点 323。
49.参照图6,料斗330上设置有上铰点331、下铰点332。
50.参照图7,翻桶架340上设置有上铰点341、下铰点342。
51.参照图8,翻桶架上支撑杆350上设置有第一铰点351、第二铰点352。
52.参照图9,翻桶架下支撑杆360上设置有第一铰点361、第二铰点362。
53.参照图10,翻桶架连杆370上设置有第一铰点371、第二铰点372。
54.具体实施方法:
55.参照图3,所述举升油缸301一端与所述压缩箱第一铰点101铰接,另 一端与所述大臂架第三铰点313铰接;所述翻斗油缸302一端与所述大臂架 第二铰点312铰接、另一端与所述小臂架第二铰点322铰接;所述大臂架第 一铰点311与所述压缩箱第二铰点102铰接;所述小臂架第一铰点321与所 述大臂架第四铰314点铰接;所述料斗上铰点331与所述大臂架第六铰316 点铰接;所述料斗连杆303一端与所述小臂架第三铰点323点铰接,另一端 与所述料斗下铰点332铰接;所述翻桶架上铰点341与所述翻桶架上支撑杆 第二铰点352铰接,所述翻桶架下铰点342与所述翻桶架下支撑杆第二铰点 362铰接;所述翻桶架上支撑杆第一铰点351与所述压缩箱第四铰点104铰 接;所述翻桶架下支撑杆第一铰点361与所述压缩箱第三铰点103铰接;所 述翻桶架连杆第一铰点371与所述大臂架第五铰点315铰接,所述翻桶架连 杆第二铰点372与所述翻桶架下铰点342铰接;所述活动销轴304连接所述 翻桶架连杆第一铰点371与所述大臂架第五铰点315。
56.动作原理:
57.参照图11,所述料斗330收集垃圾完成后,所述翻斗油缸302收回,带 动所述小臂架320逆时针旋转,从而通过所述料斗连杆303带动所述料斗330 以所述料斗上铰点331为圆心旋转,完成翻斗上料动作,垃圾由所述料斗330 进入所述压缩箱100内,再通过所述压缩机构200对垃圾进行压缩;
58.参照图12,将垃圾桶靠近所述翻桶架340放置,所述举升油缸301伸出, 带动所述大臂架310逆时针旋转,从而通过所述翻桶架连杆370带动所述翻 桶架340运动,由于所述翻桶架上支撑杆350与所述翻桶架下支撑杆360对 所述翻桶架340的约束,使得所述翻桶架340角度发生变化,从而完成翻桶 动作,垃圾由垃圾桶进入所述压缩箱100内,再通过所述压缩机构200对垃 圾进行压缩;
59.参照图13,将所述活动销轴304拆卸,断开所述翻桶架连杆第一铰点371 与所述大臂架第五铰点315的连接,此时所述举升油缸301伸出,带动所述 大臂架310逆时针旋转,所述翻桶架330停留在原位,所述举升油缸301伸 出到位后,所述大臂架310逆时针旋转90
°
,此时垃圾收集车可与设备投料 口对接倒料,垃圾由垃圾收集车进入所述压缩箱100内,再通过所述压缩机 构200对垃圾进行压缩。
60.本案的第二种实施例:
61.参照图14,一种具备多种上料功能的垃圾压缩机,由压缩机1000、垃圾 箱2000组成,所述压缩机1000由压缩箱100、压缩机构200、上料机构300 组成。所述压缩箱100作为垃圾收集及压缩容器,其前部开口,用于垃圾投 放,其后端开口,作为垃圾转移通道。所述压缩箱前部两侧对称设置有第一 铰点101、第二铰点102、第三铰点103、第四铰点104。所述压缩机构200 作为垃圾压缩部件,设置于所述压缩箱100底部,采用推压方式对垃圾进行 压缩。所述垃圾箱2000后端设置进料通道2100,所述垃圾箱2000后端进料 通道2100与所述压缩箱100后端开口对接。
62.参照图15,上料机构300包括举升油缸301、翻斗油缸302、大臂架310、 小臂架320、料斗330、料斗连杆303、翻桶架340、翻桶架上支撑杆350、 翻桶架下支撑杆360、翻桶架连杆370、活动销轴304。
63.参照图4,大臂架310上设置有第一铰点311、第二铰点312、第三铰点 313、第四铰点314、第五铰点315、第六铰点316。
64.参照图5,小臂架320上设置有第一铰点321、第二铰点322、第三铰点 323。
65.参照图6,料斗330上设置有上铰点331、下铰点332。
66.参照图7,翻桶架340上设置有上铰点341、下铰点342。
67.参照图8,翻桶架上支撑杆350上设置有第一铰点351、第二铰点352。
68.参照图9,翻桶架下支撑杆360上设置有第一铰点361、第二铰点362。
69.参照图10,翻桶架连杆370上设置有第一铰点371、第二铰点372。
70.具体实施方法:
71.参照图15,所述举升油缸301一端与所述压缩箱第一铰点101铰接,另 一端与所述大臂架第三铰点313铰接;所述翻斗油缸302一端与所述大臂架 第二铰点312铰接、另一端与所述小臂架第二铰点322铰接;所述大臂架第 一铰点311与所述压缩箱第二铰点102铰接;所述小臂架第一铰点321与所 述大臂架第四铰点314铰接;所述料斗上铰点331与所述大臂架第六铰316 点铰接;所述料斗连杆303一端与所述小臂架第三铰323点铰接,另一端与 所述料斗下铰点332铰接;所述翻桶架上铰点341与所述翻桶架上支撑杆第 二铰点352铰接,所述翻桶架下铰点342与所述翻桶架下支撑杆第二铰点362 铰接;所述翻桶架上支撑杆第一铰点351与所述压缩箱第四铰点104铰接; 所述翻桶架下支撑杆第一铰点361与所述压缩箱第三铰点103铰接;所述翻 桶架连杆第一铰点371与所述大臂架第五铰点315铰接,所述翻桶架连杆第 二铰点372与所述翻桶架下铰点342铰接;所述活动销轴304连接所述翻桶 架连杆第一铰点371与所述大臂架第五铰点315。
72.动作原理:
73.参照图16,所述料斗330收集垃圾完成后,所述翻斗油缸302收回,带 动所述小臂架320逆时针旋转,从而通过所述料斗连杆303带动所述料斗330 以所述料斗上铰点331为圆心旋转,完成翻斗上料动作,垃圾由所述料斗330 进入所述压缩箱100内,再通过所述压缩机构200对垃圾进行推压,垃圾通 过所述压缩箱100后部开口,经由所述垃圾箱2000后部进料通道2100进入 所述垃圾箱2000内;
74.参照图17,将垃圾桶靠近所述翻桶架340放置,所述举升油缸301伸出, 带动所述大臂架310逆时针旋转,从而通过所述翻桶架连杆370带动所述翻 桶架340运动,由于所述翻桶架上支撑杆350与所述翻桶架下支撑杆360对 所述翻桶架340的约束,使得所述翻桶架340角度发生变化,从而完成翻桶 动作,垃圾由垃圾桶进入所述压缩箱100内,再通过所述压缩机构200对垃 圾进行推压,垃圾通过所述压缩箱100后部开口,经由所述垃圾箱2000后部 进料通道2100进入所述垃圾箱2000内;
75.参照图18,将所述活动销轴304拆卸,断开所述翻桶架连杆第一铰点371 与所述大臂架第五铰点315的连接,此时所述举升油缸301伸出,带动所述 大臂架310逆时针旋转,所述翻桶架330停留在原位,所述举升油缸301伸 出到位后,所述大臂架310逆时针旋转90
°
,此时垃圾收集车可与设备投料 口对接倒料,垃圾由垃圾收集车进入所述压缩箱100内,再通过所述压缩机 构200对垃圾进行推压,垃圾通过所述压缩箱100后部开口,经由所述垃圾 箱2000后部进料通道2100进入所述垃圾箱2000内。
76.本案的第三种实施例:
77.本实施例针对上述两种实施例中所述上料机构300进行变换实施。
78.参照图19,一种具备多种上料功能的垃圾压缩机,所述压缩箱100 前部两侧还对
称设置有第五铰点105。
79.参照图9,所述翻桶架下支撑杆360上还设置有第三铰点363。
80.具体实施方法:
81.参照图20,所述上料机构300包含举升油缸301、翻斗油缸302、大 臂架310、小臂架320、料斗330、料斗连杆303、翻桶架340、翻桶架上 支撑杆350、翻桶架下支撑杆360、翻桶油缸305。所述举升油缸301一 端与所述压缩箱第一铰点101铰接,另一端与所述大臂架第三铰点313铰 接;所述翻斗油缸302一端与所述大臂架第二铰点312铰接、另一端与所 述小臂架第二铰点322铰接;所述大臂架第一铰点311与所述压缩箱第二 铰点102铰接;所述小臂架第一铰点321与所述大臂架第四铰点314铰接; 所述料斗上铰点331与所述大臂架第六铰316点铰接;所述料斗连杆303 一端与所述小臂架第三铰323点铰接,另一端与所述料斗下铰点332铰接; 所述翻桶架上铰点341与所述翻桶架上支撑杆第二铰点352铰接,所述翻 桶架下铰点342与所述翻桶架下支撑杆第二铰点362铰接;所述翻桶架上 支撑杆第一铰点351与所述压缩箱第四铰点104铰接;所述翻桶架下支撑 杆第一铰点361与所述压缩箱第三铰点103铰接;所述翻桶油缸305一端 与所述压缩箱第五铰点105铰接,所述翻桶油缸305另一端与所述翻桶架 下支撑杆第三铰点363铰接。
82.动作原理:
83.参照图17和图20,所述举升油缸301伸出到位后,将垃圾桶靠近所 述翻桶架340放置,所述翻桶油缸305伸出,驱动所述翻桶架下支撑杆 360逆时针旋转,从而驱动所述翻桶架340运动,由于所述翻桶架上支撑 杆350与所述翻桶架下支撑杆360对所述翻桶架340的约束,使得所述翻 桶架340角度发生变化,从而完成翻桶动作,垃圾由垃圾桶进入所述压缩 箱100内,再通过所述压缩机构200对垃圾进行压缩。或者,通过所述压 缩机构200对垃圾进行推压,垃圾通过所述压缩箱100后部开口,经由所 述垃圾箱2000后部进料通道2100进入所述垃圾箱2000内。
84.本发明在使用时,同时具备了翻桶上料、翻斗上料以及垃圾收集车对 接上料三种上料功能,且料斗与箱体设置为一整体,省去人工拆装工序, 同时杜绝了翻料过程中料斗跌落的风险,操作简单,可行性高,便于在本 领域中推广使用。
85.以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式 上的限制,虽然本发明已以较佳实施例揭示如上,然而并非用以限定本发 明,任何本领域技术人员,在不脱离本发明技术方案范围内,当可利用上 述揭示的技术内容做出些许更动或修饰为等同变化的等效实施例,但凡是 未脱离本发明技术方案内容,依据本发明的技术实质对以上实施例所作的 任何简介修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1