一种基于视觉识别技术的污水厂格栅智能控制系统的制作方法
1.本实用新型涉及污水处理设备技术领域,特别涉及一种基于视觉识别技术的污水厂格栅智能控制系统。
背景技术:
2.污水预处理的主要目的是去除水中较大的颗粒物和泥沙,以免对后序工艺的机械设备造成损害,确保运行安全。预处理的设备主要包括格栅机、提升泵及沉砂池。
3.现阶段污水厂站实际运行中,格栅机通常根据管理人员巡视情况,当格栅机栅渣量过多时,人为手动进行启停控制,进而对阻拦下的栅渣进行收集清理。目前的控制方式效率低下,人工劳动强度大,生产成本高,同时难以达到理想的控制效果且栅渣无法得到及时有效的清理。
技术实现要素:
4.本实用新型的目的在于克服现有技术的不足,提供一种基于视觉识别技术的污水厂格栅智能控制系统,基于视觉识别技术来对栅渣量进行进行实时监控,通过影像分析实现格栅机的自动化启停控制,避免人工到场控制,降低人工劳动强度。
5.本实用新型的目的是通过以下技术方案来实现的:
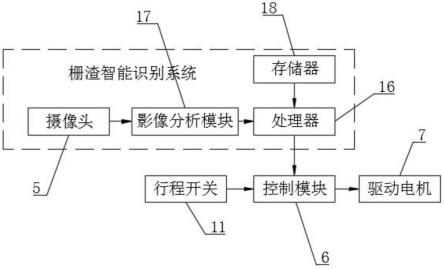
6.一种基于视觉识别技术的污水厂格栅智能控制系统,包括栅渣智能识别系统和控制模块,所述栅渣智能识别系统包括摄像头、处理器、存储器和影像分析模块,所述摄像头设置在格栅机上,用于获取影像信息;所述存储器用于信息存储;所述影像分析模块用于对摄像头获取的影像信息进行分析并将分析结果发送至处理器;所述处理器读取分析结果并将分析结果反馈至控制模块;
7.所述摄像头的信号输出端与所述影像分析模块的信号输入端相连接,所述影像分析模块的信号输出端与所述处理器的信号输入端相连接,所述处理器的信号输出端与所述控制模块的第一信号输入端相连接,所述控制模块的信号输出端与所述格栅机的驱动电机的信号输入端相连接。
8.进一步地,所述的格栅机上还设有辅助启停装置,所述辅助启停装置包括旁通管、浮球和行程开关,所述旁通管设置在所述格栅机上,所述旁通管底端与格栅池内污水连通,所述旁通管内设有环形挡片,所述行程开关设置在所述旁通管内且位于环形挡片上方,所述浮球设置在旁通管内且位于环形挡片与行程开关之间;
9.所述行程开关的信号输出端与所述控制模块的第二信号输入端相连接。
10.进一步地,所述的旁通管底部设有滤网。
11.进一步地,所述的旁通管内设有环形密封板,所述环形密封板位于浮球和行程开关之间。
12.进一步地,所述的环形密封板的内环处设有密封圈。
13.本实用新型的有益效果是:
14.1)本实用新型基于视觉识别技术来对栅渣量进行实时监控,通过影像分析进而实现格栅的自动化启停控制,避免了人工到场控制,降低了人工劳动强度。
15.2)设置的辅助启停装置可为格栅机的自动化控制系统提供第二重保障,避免摄像头如进水、镜面污染不能清晰拍摄画面时不能自动控制格栅机的情况发生。同时辅助启停装置无需一直供电,节能环保。
附图说明
16.图1为本实用新型实施例中控制模块工作原理框图;
17.图2为本实用新型实施例中基于视觉识别技术的污水厂格栅智能控制系统的整体结构示意图;
18.图3为本实用新型实施例中辅助启停装置的结构示意图;
19.图中,1、格栅池;2、格栅机;3、进水管;4、出水管;5、摄像头;6、控制模块;7、驱动电机;8、辅助启停装置;9、旁通管;10、浮球;11、行程开关;12、环形挡片;13、滤网;14、环形密封板;15、密封圈;16、处理器;17、影像分析模块;18、存储器。
具体实施方式
20.下面将结合实施例,对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.参阅图1-3,本实用新型提供一种技术方案:
22.实施例:
23.如图1和图2所示,一种基于视觉识别技术的污水厂格栅智能控制系统,包括栅渣智能识别系统和控制模块6,所述栅渣智能识别系统包括摄像头5、处理器16、存储器18和影像分析模块17,所述摄像头5设置在格栅机2上,用于获取影像信息;所述存储器18用于信息存储;所述影像分析模块17用于对摄像头5获取的影像信息进行分析并将分析结果发送至处理器16;所述处理器16读取分析结果并将分析结果反馈至控制模块6;
24.所述摄像头5的信号输出端与所述影像分析模块17的信号输入端相连接,所述影像分析模块17的信号输出端与所述处理器16的信号输入端相连接,所述处理器16的信号输出端与所述控制模块6的第一信号输入端相连接,所述控制模块6的信号输出端与所述格栅机2的驱动电机7的信号输入端相连接。
25.其中,格栅机2设置在格栅池1中使用,所述格栅池1设有进水管3和出水管4,图2中标号a表示地面,标号b表示格栅池1进水管3与格栅机2之间的液面,标号c表示格栅池1出水管4与格栅机2之间的液面。
26.工作原理:摄像头5拍格栅机2阻拦垃圾的情况。当格栅机2阻拦垃圾的量增多至超出摄像头5拍摄范围时,摄像头5拍摄范围内的垃圾总量不发生变化。此时摄像头5拍摄范围内的垃圾处于相对静止的状态。
27.影像分析模块根据摄像头5拍摄的影像进行垃圾静态or动态识别。当影像分析模块识别出摄像头5拍摄范围内的垃圾处于静态时,可判定格栅机2阻挡的垃圾已经达到可排
出的量。此时控制模块6根据处理器反馈的分析结果控制格栅机2的驱动电机7启动,进而将格栅机2阻挡的垃圾排出(控制模块6可通过设定驱动电机7每次启动后的工作时长来控制排出垃圾的时长,该时长根据不同格栅机2的垃圾排出能力进行设置)。若影像分析模块分析出摄像头5拍摄范围内的垃圾处于动态时,说明摄像头5范围内的垃圾还在增加,此时控制模块6不向驱动电机7发出控制信号。
28.其中影像分析模块判断摄像头5拍摄范围内垃圾的动态静态可以是但不局限于通过前后帧的目标位置偏差进行判定(该方式为公知常识此处不做赘述)。控制模块、驱动电机、摄像头之间可以是但不局限于无线通信连接(该连接方式为公知常识,此处不做赘述)。
29.其次,管理人员还可通过摄像头拍摄的画面对格栅机2阻挡的垃圾量进行人工判断,若垃圾量过多,人工通过控制模块向驱动电机发出控制信号,从而控制格栅机2的启停。同时管理员通过像头拍摄的画面对格栅机2阻挡的垃圾量判断后到现场控制格栅机2的启停,这样可避免管理人员反复查看。多种控制方式灵活选择。而影像分析模块的分析结果可由存储器存储,方便管理人员根据分析结果掌握污水处理情况。
30.本实用新型的监控系统通过摄像头5拍摄范围内的垃圾状态进而实现格栅机2的远程化启停控制,避免了人工现场控制,降低了人工劳动强度。
31.进一步地,如图1和图2所示,所述的格栅机2上还设有辅助启停装置8,所述辅助启停装置8包括旁通管9、浮球10和行程开关11,所述旁通管9设置在所述格栅机2上,所述旁通管9底端与格栅池1内污水连通,所述旁通管9内设有环形挡片12,所述行程开关11设置在所述旁通管9内且位于环形挡片12上方,所述浮球10设置在旁通管9内且位于环形挡片12与行程开关11之间;
32.所述行程开关11的信号输出端与所述控制模块6的第二信号输入端相连接。
33.其中,行程开关11高于格栅机2正常使用时格栅池1内的(格栅池1进水管3与格栅机2之间)液面。当格栅机2阻挡污水中的污物时,格栅池1进水管3与格栅机2之间的液面会上升(因为出水量小于进水量),液面上升时根据连通器原理旁通管9内的液面同步上升。旁通管9内液面上升带动浮球10上行,当浮球10上升至与行程开关11接触时,行程开关11动作,并将该信号发送至控制模块6,控制模块6控制格栅机2的驱动电机7启动。此时格栅机2工作,进而对其阻拦的污物进行处理。污物处理干净后,排水量恢复,此时格栅池1进水管3与格栅机2之间的液面逐渐恢复,进而浮球10复位。
34.设置的辅助启停装置8可为格栅机2的自动控制提供第二重保障,避免摄像头5如进水、镜面污染不能清晰拍摄画面时不能自动控制格栅机2的情况发生。同时辅助启停装置8无需一直供电,节能环保。
35.进一步地,所述的旁通管9底部设有滤网13。设置的滤网13避免污水中的污物进入旁通管9,进而影响浮球10的使用。
36.进一步地,所述的旁通管9内设有环形密封板14,所述环形密封板14位于浮球10和行程开关11之间。浮球10上升时,浮球10的部分由环形密封板14伸出与行程开关11接触,进而开启行程开关11。而浮球10未穿过环形密封板14的部分与环形密封板14之间形成密封进而阻止液体继续上升,使液面最高升至环形密封板14下表面。如此可保证行程开关11不与液体接触,避免行程开关11被泡坏,提高了行程开关11的使用寿命。如此设置行程开关11无需做其他密封,能有效保证形成开关与浮球10的接触效果。
37.进一步地,所述的环形密封板14的内环处设有密封圈15。设置的密封圈15可进一步保证浮球10与环形密封板14之间的密封。
38.以上所述仅是本实用新型的优选实施方式,应当理解本实用新型并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本实用新型的精神和范围,则都应在本实用新型所附权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1