一种管道活性炭智能处理装置的制作方法
1.本实用新型涉及活性炭处理技术领域,尤其涉及一种管道活性炭智能处理装置。
背景技术:
2.活性炭是一种黑色多孔的固体炭质,由煤通过粉碎、成型或用均匀的煤粒经炭化、活化生产。主要成分为碳,并含少量氧、氢、硫、氮、氯等元素,具有很强的吸附性能,为用途极广的一种工业吸附剂。
3.目前管道内活性炭的清理大多采用水冲洗的方式,但由于管道的形状弯曲不平整,因此水冲洗的过程在常规处理中不仅冲洗的活性炭量少,还浪费水源和人员的时间和精力,并且部分活性炭会吸附在管道的内壁造成积留,从而影响管道的正常使用。
技术实现要素:
4.基于现有的管道内活性炭的清理需要浪费大量水源的技术问题,本实用新型提出了一种管道活性炭智能处理装置。
5.本实用新型提出的一种管道活性炭智能处理装置,包括管道、爬行机器人和旋转摄像头,所述爬行机器人的上表面设置有升降装置,所述爬行机器人的上表面通过所述升降装置与所述旋转摄像头的下表面固定安装,所述升降装置包括液压缸,通过所述液压缸活塞杆的伸缩带动所述旋转摄像头进行升降;
6.所述爬行机器人的一侧表面设置有清理装置,所述清理装置包括风机,通过所述风机将所述管道内附着的活性炭吸出。
7.优选地,所述升降装置还包括下底板和上底板,所述下底板的内侧表面与所述液压缸的一侧表面固定安装,所述下底板和上底板的两侧表面均开设有滑槽,所述滑槽的内壁滑动连接有滑杆,所述液压缸的活塞杆一端与所述滑杆的外表面固定连接,所述滑杆的两端均铰接有剪刀架,所述剪刀架的两端分别通过铰接轴与所述下底板和所述上底板的内侧表面铰接;
8.通过上述技术方案,液压缸的活塞杆伸出带动下底板内的滑杆在滑槽内滑动,从而带动剪刀架通过铰接轴铰接的部分在铰接轴上转动,张开剪刀架,剪刀架的张开带动上底板内的滑杆在滑槽内滑动。
9.优选地,所述上底板的上表面与所述旋转摄像头的下表面固定安装,所述旋转摄像头的上表面固定安装有刮板;
10.通过上述技术方案,随着剪刀架的伸展带动上底板上移,上底板的上移带动旋转摄像头上移,便于对管道内壁进行观察,达到确定活性炭颗粒在管道内附着位置的效果,刮板随着旋转摄像头的上移与管道的内顶壁接触,从而将管道内顶壁上附着的活性炭颗粒刮落。
11.优选地,所述清理装置还包括折叠管道,所述折叠管道的一端与所述风机的吸风口固定连通,所述折叠管道的另一端贯穿所述爬行机器人的一侧表面并固定套接有吸嘴;
12.通过上述技术方案,折叠管道有利于爬行机器人进入管道内更深的位置,在旋转摄像头捕捉到的活性炭颗粒时,控制吸嘴移动到活性炭颗粒上方,风机的运作带动活性炭颗粒吸入折叠管道内,并沿着折叠管道排出管道。
13.优选地,所述爬行机器人的内壁固定安装有电机,所述电机的输出轴一端延伸至所述爬行机器人的外表面并通过轴承固定安装有固定环,所述固定环的一侧表面与所述爬行机器人的一侧表面固定连接,所述固定环的内壁滑动连接有连接杆,所述连接杆的一端与所述电机的输出轴一端固定套接;
14.通过上述技术方案,在旋转摄像头捕捉到管道内的活性炭颗粒时,旋转摄像头对采集到的原始图像数据进行处理,然后利用处理得到的图像信息控制电机运作,电机输出轴的转动带动连接杆转动,固定环固定支撑连接杆。
15.优选地,所述连接杆的另一端通过连接件固定连接有电动伸缩杆,所述电动伸缩杆的一端与所述吸嘴的外表面固定连接;
16.通过上述技术方案,旋转摄像头同样控制电动伸缩杆运作,连接杆的转动带动电动伸缩杆转动,电动伸缩杆的伸缩带动吸嘴靠近活性炭颗粒。
17.本实用新型中的有益效果为:
18.通过设置清理装置,旋转摄像头随着爬行机器人在管道内的爬行对管道内壁附着的活性炭颗粒进行拍摄采集,旋转摄像头对采集到的原始图像数据进行处理,然后利用处理得到的图像信息控制电机和电动伸缩杆运作,电机输出轴的转动带动连接杆转动,连接杆的转动带动电动伸缩杆转动,电动伸缩杆的伸缩带动吸嘴靠近活性炭颗粒,风机的运作带动活性炭颗粒通过吸嘴吸入折叠管道内,活性炭颗粒沿着折叠管道排出管道,从而达到清理管道内壁附着的活性炭颗粒的效果。
附图说明
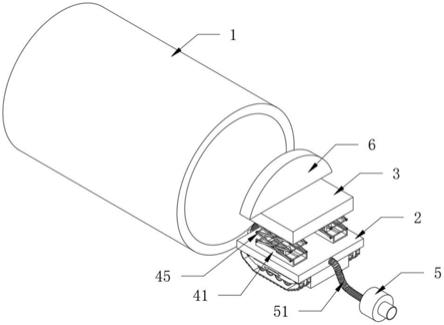
19.图1为本实用新型提出的一种管道活性炭智能处理装置的示意图;
20.图2为本实用新型提出的一种管道活性炭智能处理装置的爬行机器人结构立体图;
21.图3为本实用新型提出的一种管道活性炭智能处理装置的剪刀架结构立体图;
22.图4为本实用新型提出的一种管道活性炭智能处理装置的电机结构立体图。
23.图中:1、管道;2、爬行机器人;3、旋转摄像头;4、液压缸;41、下底板;42、上底板;43、滑槽;44、滑杆;45、剪刀架;5、风机;51、折叠管道;52、吸嘴;53、电机;54、固定环;55、连接杆;56、电动伸缩杆;6、刮板。
具体实施方式
24.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
25.参照图1-4,一种管道活性炭智能处理装置,包括管道1、爬行机器人2和旋转摄像头3,爬行机器人2的上表面设置有升降装置,爬行机器人2的上表面通过升降装置与旋转摄像头3的下表面固定安装,升降装置包括液压缸4,通过液压缸4活塞杆的伸缩带动旋转摄像
头3进行升降;
26.进一步地,升降装置还包括下底板41和上底板42,下底板41的内侧表面与液压缸4的一侧表面固定安装,下底板41和上底板42的两侧表面均开设有滑槽43,滑槽43的内壁滑动连接有滑杆44,液压缸4的活塞杆一端与滑杆44的外表面固定连接,滑杆44的两端均铰接有剪刀架45,剪刀架45的两端分别通过铰接轴与下底板41和上底板42的内侧表面铰接;
27.液压缸4的活塞杆伸出带动下底板41内的滑杆44在滑槽43内滑动,从而带动剪刀架45通过铰接轴铰接的部分在铰接轴上转动,张开剪刀架45,剪刀架45的张开带动上底板42内的滑杆44在滑槽43内滑动;
28.进一步地,上底板42的上表面与旋转摄像头3的下表面固定安装,旋转摄像头3的上表面固定安装有刮板6;
29.随着剪刀架45的伸展带动上底板42上移,上底板42的上移带动旋转摄像头3上移,便于对管道1内壁进行观察,达到确定活性炭颗粒在管道1内附着位置的效果,刮板6随着旋转摄像头3的上移与管道1的内顶壁接触,从而将管道1内顶壁上附着的活性炭颗粒刮落;
30.爬行机器人2的一侧表面设置有清理装置,清理装置包括风机5,通过风机5将管道1内附着的活性炭吸出;
31.进一步地,清理装置还包括折叠管道51,折叠管道51的一端与风机5的吸风口固定连通,折叠管道51的另一端贯穿爬行机器人2的一侧表面并固定套接有吸嘴52;
32.折叠管道51有利于爬行机器人2进入管道1内更深的位置,在旋转摄像头3捕捉到的活性炭颗粒时,控制吸嘴52移动到活性炭颗粒上方,风机5的运作带动活性炭颗粒吸入折叠管道51内,并沿着折叠管道51排出管道1;
33.进一步地,爬行机器人2的内壁固定安装有电机53,电机53的输出轴一端延伸至爬行机器人2的外表面并通过轴承固定安装有固定环54,固定环54的一侧表面与爬行机器人2的一侧表面固定连接,固定环54的内壁滑动连接有连接杆55,连接杆55的一端与电机53的输出轴一端固定套接;
34.具体地,在旋转摄像头3捕捉到管道1内的活性炭颗粒时,旋转摄像头3对采集到的原始图像数据进行处理,然后利用处理得到的图像信息控制电机53运作,电机53输出轴的转动带动连接杆55转动,固定环54固定支撑连接杆55;
35.进一步地,连接杆55的另一端通过连接件固定连接有电动伸缩杆56,电动伸缩杆56的一端与吸嘴52的外表面固定连接;
36.具体地,旋转摄像头3同样控制电动伸缩杆56运作,连接杆55的转动带动电动伸缩杆56转动,电动伸缩杆56的伸缩带动吸嘴52靠近活性炭颗粒。
37.工作原理:清理管道1内壁附着的活性炭颗粒时,爬行机器人2上的液压缸4活塞杆伸出带动下底板41内的滑杆44在滑槽43内滑动,从而带动剪刀架45通过铰接轴铰接的部分在铰接轴上转动,张开剪刀架45,剪刀架45的张开带动上底板42内的滑杆44在滑槽43内滑动,随着剪刀架45的伸展带动上底板42上移,上底板42的上移带动旋转摄像头3上移;
38.旋转摄像头3上升到一定位置后,将爬行机器人2塞入管道,爬行机器人2沿着管道1的内壁向内爬行,随着爬行机器人2的爬行带动折叠管道51拉伸,同时带动刮板6将管道1内顶壁附着的活性炭颗粒刮落;
39.当旋转摄像头3捕捉拍摄到管道1内壁的活性炭颗粒时,旋转摄像头3对采集到的
原始图像数据进行处理,然后利用处理得到的图像信息控制电机53和电动伸缩杆56运作,电机53输出轴的转动带动连接杆55转动,连接杆55的转动带动电动伸缩杆56转动,电动伸缩杆56的转动带动吸嘴52转动,电动伸缩杆56的伸缩带动吸嘴52靠近活性炭颗粒,风机5的运作带动活性炭颗粒通过吸嘴52吸入折叠管道51内,活性炭颗粒沿着折叠管道51排出管道1。
40.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1