一种新型的铝铸件超声波清洗设备的制作方法
1.本实用新型涉及一种清洗设备,更具体一点说,涉及一种新型的铝铸件超声波清洗设备,属于铸件清洗领域。
背景技术:
2.铸件清洗是利用超声波发生器的声波,在清洗液里传导使铝铸件表面清洁,以清除铝铸件表面的油污杂物等,工作过程中超声波发生器是一直在工作的,一台设备共装配12kw功率的发生器。每工作日的空运行耗电量较大,放置铸件超声清洗主要是人工进行操作,耗时耗力,对于工作人员是较大的负担。
技术实现要素:
3.为了解决上述现有技术问题,本实用新型提供具有结构简单,节约能源、降低劳动者的工作压力等技术特点的一种新型的铝铸件超声波清洗设备。
4.为了实现上述目的,本实用新型是通过以下技术方案实现的:
5.一种新型的铝铸件超声波清洗设备,包括控制器、水箱、信号开关,所述水箱上方安装有一号滑台,所述一号滑台上可滑动的设有机械手,所述机械手能够夹取有工件装夹框,所述工件装夹框不密封且其内能够放置有铸件,所述水箱包括独立设置的超声波清洗箱和超声波漂洗箱,所述超声波清洗箱和超声波漂洗箱内均带有超声波发生器,所述超声波清洗箱和超声波漂洗箱内均安装有升降气缸,所述升降气缸上带有位置传感器,所述升降气缸、位置传感器、信号开关、超声波发生器均与控制器电性连接。
6.优选的,所述超声波清洗箱和超声波漂洗箱的上端口处均安装有二号滑台,所述二号滑台上可滑动的安装有转动电机,所述工件装夹框上开设有矩形槽口,所述转动电机的转轴上安装有矩形块,所述矩形块与矩形槽口大小相适配。
7.优选的,所述二号滑台为由电机驱动的一字滑台,驱动一字滑台的电机与控制器电性连接,所述转动电机可滑动的安装在一字滑台的滑块上。
8.优选的,所述一号滑台为由电机驱动的一字滑台,驱动一字滑台的电机与控制器电性连接,机械手可滑动的安装在一字滑台的滑块上。
9.优选的,所述机械手包括主体,所述主体连接在一号滑台的滑块上,所述主体的左右端分别铰接有弯折设置的左机械手和右机械手,所述主体下端面上连接有液压缸,所述液压缸的伸缩杆末端连接有固定块,所述固定块上铰接有左连杆和右连杆,所述左连杆和右连杆分别铰接在左机械手和右机械手上。
10.有益效果:能够减少设备空运行能耗,改善设备用电,降低对能源的浪费,对铝铸件清洗,工作效率高,对盲孔类的产品清洁效果好,原理简单,安全性能高,在实际生产中较为经济实用,具有广泛的推广价值和应用前景。
附图说明
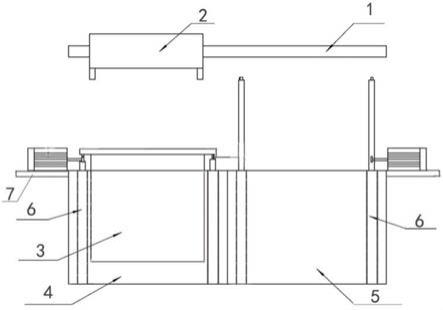
11.图1是本实用新型整体结构示意图。
12.图2是本实用新型左机械手和右机械手抓取结构示意图。
13.图3是本实用新型左机械手和右机械手分离结构示意图。
具体实施方式
14.以下结合说明书附图,对本实用新型作进一步说明,但本实用新型并不局限于以下实施例。
15.如图1-3所示为一种新型的铝铸件超声波清洗设备的具体实施例,该实施例一种新型的铝铸件超声波清洗设备,包括控制器、水箱、信号开关,所述水箱上方安装有一号滑台1,所述一号滑台1上可滑动的设有机械手2,所述机械手2能够夹取有工件装夹框3,所述工件装夹框3不密封且其内能够放置有铸件,所述水箱包括独立设置的超声波清洗箱4和超声波漂洗箱5,所述超声波清洗箱4和超声波漂洗箱5内均带有超声波发生器,所述超声波清洗箱4和超声波漂洗箱5内均安装有升降气缸6,所述升降气缸6上带有位置传感器,所述升降气缸6、位置传感器、信号开关、超声波发生器均与控制器电性连接;
16.工作流程:首先在超声波清洗箱4和超声波漂洗箱5内盛装好清洗液,机械手2上抓取有工件装夹框3,且工件装夹框3内放置有待清洗的铸件,机械手2沿着一号滑台1移动至超声波清洗箱4上方,此时,升降气缸6的伸缩杆上升到设置位置(由位置传感器实现位置设置),机械手2松开工件装夹框3,将其放置在升降气缸6的伸缩杆上,升降气缸6的伸缩杆下降以实现将工件装夹框3送进超声波清洗箱4内(由位置传感器实现位置设置),当到达设定的位置时,位置传感器触发信号开关,超声波清洗箱4内的超声波发生器启动,对工件装夹框3内的铸件进行超声清洗,清洗完毕后(可以设置启动的时间等参数),超声波清洗箱4内的超声波发生器关闭,升降气缸6的伸缩杆上升以实现将工件装夹框3伸出超声波清洗箱4,机械手2抓取工件装夹框3,沿着一号滑台1移动至超声波漂洗箱5上方,后续操作与上述相同,当漂洗完毕后,将工件装夹框3取走,取出铸件即可,整个控制的启动,由控制器控制,超声波发生器不是一直开启的,可以降低能耗。
17.优选的一种实施例方式,所述超声波清洗箱4和超声波漂洗箱5的上端口处均安装有二号滑台7,所述二号滑台7上可滑动的安装有转动电机,所述工件装夹框3上开设有矩形槽口,所述转动电机的转轴上安装有矩形块,所述矩形块与矩形槽口大小相适配;
18.工作流程:针对超声波清洗箱4:当超声波清洗箱4内的超声波发生器关闭,升降气缸6的伸缩杆上升,先将工件装夹框3上的矩形槽口伸出超声波清洗箱4,超声波清洗箱4处的转动电机沿着二号滑台7移动,直至矩形块插入矩形槽口,此时,升降气缸6的伸缩杆下降收起,启动转动电机缓慢转动,带动工件装夹框3转动180度,倒出铸件里的清洗液及其它杂物,然后再启动转动电机,带动工件装夹框3转动180度,此时工件装夹框3回正,升降气缸6的伸缩杆升起顶住工件装夹框3,超声波清洗箱4处的转动电机沿着二号滑台7移动,矩形块抽出矩形槽口,升降气缸6的伸缩杆继续升起顶起工件装夹框3,机械手2抓取工件装夹框3,沿着一号滑台1移动至超声波漂洗箱5上方,再进入超声波漂洗箱5漂洗,当漂洗完毕后,将工件装夹框3取走,取出铸件即可,整个控制的启动,由控制器控制。
19.优选的一种实施例方式,所述二号滑台7为由电机驱动的一字滑台,驱动一字滑台
的电机与控制器电性连接,所述转动电机可滑动的安装在一字滑台的滑块上,一字滑台包括滑块、丝杆、动力电机,动力电机带动滑块左右移动,即实现转动电机左右移动。
20.优选的一种实施例方式,所述一号滑台1为由电机驱动的一字滑台,驱动一字滑台的电机与控制器电性连接,机械手2可滑动的安装在一字滑台的滑块上,一字滑台包括滑块、丝杆、动力电机,动力电机带动滑块左右移动,即实现机械手2左右移动,机械手2可以实现夹紧、放开功能即可,对具体结构不作限制。
21.优选的一种实施例方式,所述机械手2包括主体8,所述主体8连接在一号滑台1的滑块上,所述主体8的左右端分别铰接有弯折设置的左机械手9和右机械手10,所述主体8下端面上连接有液压缸11,所述液压缸11的伸缩杆末端连接有固定块,所述固定块上铰接有左连杆12和右连杆13,所述左连杆12和右连杆13分别铰接在左机械手9和右机械手10上,如图2所示,此时未抓取状态,当需要松开工件装夹框3时,液压缸11的伸缩杆收缩,连杆12和右连杆13往外侧顶起左机械手9和右机械手10,使得左机械手9和右机械手10距离变大,松开工件装夹框3,采用液压缸11,动力稳定,抓取力度大、抓取稳。
22.最后,需要注意的是,本实用新型不限于以上实施例,还可以有很多变形。本领域的普通技术人员能从本实用新型公开的内容中直接导出或联想到的所有变形,均应认为是本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1