一种回收型智能厨余垃圾处理装置及方法与流程
1.本发明涉及厨余垃圾处理装置技术领域,具体涉及一种回收型智能厨余垃圾处理装置及方法。
背景技术:
2.厨余垃圾是指居民日常生活及食品加工、饮食服务、单位供餐等活动中产生的垃圾,包括丢弃不用的菜叶、剩菜、剩饭、果皮、蛋壳、茶渣、骨头等,其主要来源为家庭厨房、餐厅、饭店、食堂、市场及其他与食品加工有关的行业,很多餐桌上最后都会剩下很多的食物没有被吃完,直接倒掉,存在大量的浪费,同时会造成一定的环境污染,食物在分解过程中,容易滋生细菌造成污染。
3.现有技术存在以下不足:现有的厨余垃圾一般直接倒入到垃圾桶中当成垃圾处理,利用率极低,同时会造成大量的资源浪费和造成环境污染,无法将厨余垃圾进行良好的回收。
4.因此,发明一种回收型智能厨余垃圾处理装置很有必要。
技术实现要素:
5.为此,本发明提供一种回收型智能厨余垃圾处理装置,通过设置粉碎装置将餐桌上多余的食物进行分级打碎,方便家禽类动物食用打碎后的食物,然后通过设置脱水装置,将食物中混合的水分去除,方便将厨余垃圾进行回收,喂食家禽,降低对环境的污染,提高了食物的利用率,以解决背景技术中的问题。
6.为了实现上述目的,本发明提供如下技术方案:一种回收型智能厨余垃圾处理装置,包括传送带,所述传送带右侧设有粉碎装置,所述粉碎装置右端固定连接脱水装置,所述粉碎装置包括壳体,所述壳体内壁底部中心位置固定安装电机座,所述电机座内壁固定安装伺服电机一,所述壳体内壁固定安装粉碎仓,所述粉碎仓内壁中心位置固定安装支撑环,所述支撑环下方为下粉碎仓,所述支撑环上方为上粉碎仓,所述伺服电机一输出轴延伸至上粉碎仓内部,所述伺服电机一输出轴外壁分别固定安装下层粉碎器和上层破碎器,所述脱水装置包括方形壳体,所述方形壳体底部外壁中心位置固定按安装伺服电机二,所述方形壳体底部开设排水孔,所述伺服电机二输出轴延伸至方形壳体内部,所述伺服电机二输出轴外壁固定安装齿轮一,所述方形壳体内壁设有脱水仓,所述脱水仓底部为圆柱形,所述脱水仓包括外仓和内仓,所述外仓底部中心位置开设齿轮槽,所述齿轮槽与齿轮一配合插接,所述外仓和内仓之间为空腔,所述外仓侧壁固定安装杀菌器。
7.优选的,所述壳体左侧外壁开设进料孔一,所述传送带右端插入到进料孔一内部,所述传送带右端位于粉碎仓上方。
8.优选的,所述支撑环顶部插接隔板,所述隔板表面均匀开设通孔,所述粉碎仓右侧内壁开设出料孔一,所述出料孔一位于下粉碎仓内部,所述出料孔一右端固定连接导管一,所述导管一右端固定连接止逆阀。
9.优选的,所述下层粉碎器位于下粉碎仓内部,所述下层粉碎器内壁均匀安装破碎刀一,所述破碎刀一为环形分布,所述破碎刀一外壁均匀固定安装支撑架,所述支撑架内壁与伺服电机一输出轴外壁固定连接。
10.优选的,所述上层破碎器位于上粉碎仓内部,所述上层破碎器表面均匀开设过滤孔,所述上层破碎器表面均匀固定安装破碎刀片二,所述破碎刀片二为直角梯形状。
11.优选的,所述方形壳体左侧外壁开设进料孔二,所述进料孔二端部固定安装托板,所述托板延伸至脱水仓上方,所述进料孔二与止逆阀配合密封连接。
12.优选的,所述方形壳体右侧底部外壁固定安装出料槽,所述出料槽右端固定连接出料扁管。
13.优选的,所述外仓底部开设出料孔二,所述内仓与外仓之间通过连杆固定连接,所述内仓底部外壁中心位置固定安装伺服电机三,所述伺服电机三输出端外壁固定安装刮板,所述内仓底部开设出料孔三,所述出料孔三底部固定连接导管二,所述导管二底部固定连接电磁阀,所述电磁阀底端与出料孔二固定连接,所述外仓和内仓底部均匀开设排水孔。
14.优选的,所述杀菌器包括环形架,所述环形架固定安装在外仓内壁上,所述环形架表面均匀安装紫外线灭菌灯,所述外仓内壁与内仓外壁之间固定连接密封环,所述密封环位于环形架上方。
15.一种回收型智能厨余垃圾处理方法,包括具体操作步骤如下:
16.s1:将厨余垃圾进行分类,将可喂食家禽的剩余食物挑选出来,然后将食物置入到传送带顶部,通过传送带将食物运输到粉碎装置内,随后食物在传送带尽头下落到粉碎仓内部,然后进入到上粉碎仓内,通过驱动伺服电机一,通过伺服电机一驱动上层破碎器和下层粉碎器同步转动,通过上层破碎器将通入到上粉碎仓内的食物搅拌并进行破碎,随后食物残渣通过过滤孔进入到隔板顶部,随后穿过隔板进入到下粉碎仓内,通过下层粉碎器再次将食物进一步打碎,随后食物残值和混合在其中的水分一起通过导管一、止逆阀进入到脱水装置内;
17.s2:导管一传来的食物残渣和水的混合物一起落入到托板上,随后进入到内仓内部,通过驱动伺服电机三,使得脱水仓转动,在离心力作用下,食物残渣中的水分与食物进行分离,随后水分通过内仓和外仓底部的排水孔排出,最后通过方形壳体底部排水孔排出;
18.s4:在脱水装置脱水工作时,同步打开杀菌器,通过紫外线灭菌灯照射内仓,从而对内仓内部的食物进行杀菌消毒;
19.s5:在脱水结束后,通过伺服电机二将脱水仓调节好位置,使得导管二位于出料槽上方,通过驱动伺服电机三,从而通过刮板刮动内仓内食物,使得食物通过出料孔三排出到导管二内,随后通过出料槽和出料扁管排出,随后通过外置打包机进行打包。
20.本发明的有益效果是:
21.1.通过设置粉碎装置,将食物残渣导入到粉碎仓内,通过伺服电机一同时驱动上层破碎器和下层破碎器工作,将食物残渣进行分级粉碎,提高食物残渣的粉碎效率,家禽食用时消化效率,提高食物的利用率,方便对食物残渣进行回收利用;
22.2.通过设置脱水装置,通过伺服电机二驱动脱水仓转动,同时在外仓内壁固定安装杀菌器,通过紫外线灭菌灯照射食物残渣,在脱水时同步进行杀菌工作,提高了设备的工作效率;
23.3.通过设置止逆阀,防止在脱水装置转动时,脱水装置内部气流通过导管一回流到粉碎装置内,提高了脱水时设备运行的稳定性。
附图说明
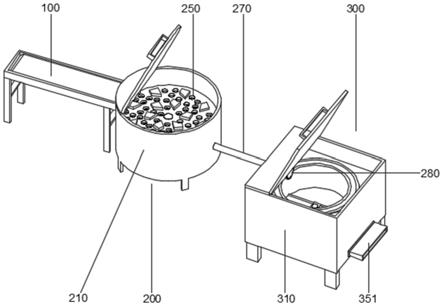
24.图1为本发明提供的整体结构示意图;
25.图2为本发明提供的粉碎装置分解图;
26.图3为本发明提供的粉碎仓结构示意图;
27.图4为本发明提供的下层粉碎器结构示意图;
28.图5为本发明提供的脱水装置俯视结构示意图;
29.图6为本发明提供的方形壳体结构示意图;
30.图7为本发明提供的脱水仓仰视图;
31.图8为本发明提供的脱水仓俯视图;
32.图9为本发明提供的脱水仓分解图。
33.图中:传送带100、粉碎装置200、壳体210、进料孔一211、电机座212、伺服电机一220、粉碎仓230、支撑环231、下粉碎仓232、出料孔一233、下层粉碎器240、破碎刀一241、支撑架242、上粉碎仓234、隔板250、上层破碎器260、过滤孔261、破碎刀片二262、导管一270、止逆阀280、脱水装置300、方形壳体310、进料孔二320、托板330、齿轮一340、出料槽350、出料扁管351、脱水仓360、外仓361、齿轮槽362、出料孔二363、内仓370、伺服电机三371、刮板372、出料孔三373、导管二、电磁阀374、杀菌器380、环形架381、紫外线灭菌灯382、密封环390。
具体实施方式
34.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
35.参照附图1-9,本发明提供的一种回收型智能厨余垃圾处理装置及方法,为了实现上述目的,本发明提供如下技术方案:一种回收型智能厨余垃圾处理装置及方法,包括传送带100,传送带100右侧设有粉碎装置200,粉碎装置200右端固定连接脱水装置300,粉碎装置200包括壳体210,壳体210内壁底部中心位置固定安装电机座212,电机座212内壁固定安装伺服电机一220,壳体210内壁固定安装粉碎仓230,粉碎仓230内壁中心位置固定安装支撑环231,支撑环231下方为下粉碎仓232,支撑环231上方为上粉碎仓234,伺服电机一220输出轴延伸至上粉碎仓234内部,伺服电机一220输出轴外壁分别固定安装下层粉碎器240和上层破碎器260,脱水装置300包括方形壳体310,方形壳体310底部外壁中心位置固定按安装伺服电机二(图中未标注),方形壳体310底部开设排水孔(图中未标注),伺服电机二输出轴延伸至方形壳体310内部,伺服电机二输出轴外壁固定安装齿轮一340,方形壳体310内壁设有脱水仓360,脱水仓360底部为圆柱形,脱水仓360包括外仓361和内仓370,外仓361底部中心位置开设齿轮槽362,齿轮槽362与齿轮一340配合插接,外仓361和内仓370之间为空腔,外仓361侧壁固定安装杀菌器380,壳体210左侧外壁开设进料孔一211,传送带100右端插入到进料孔一211内部,传送带100右端位于粉碎仓230上方,支撑环231顶部插接隔板250,隔板250表面均匀开设通孔,粉碎仓230右侧内壁开设出料孔一233,出料孔一233位于
下粉碎仓232内部,出料孔一233右端固定连接导管一270,导管一270右端固定连接止逆阀280,具体的,传送带100具有方便将食物残渣导入到粉碎装置200内的作用,粉碎装置200具有将食物残渣粉碎的作用,脱水装置300具有方便将食物残渣中的水分分离,提高食物残渣的防腐性能,同时降低食物残渣的体积,方便进行打包,电机座212具有方便安装伺服电机一220的作用,伺服电机一220具有方便驱动上层破碎器260和下层粉碎器240配合使用,从而方便将食物分级打碎的作用,方便家禽进行消化,同时有利于降低食物残渣的体积,方便打包和搬运,粉碎仓230具有方便进行食物残渣打碎的作用,伺服电机二具有方便驱动脱水仓360转动的作用,方形壳体310底部排水孔具有方便将方形壳体310内部水排出的作用,齿轮一340和齿轮槽362配合插接使用,具有传动的作用,内仓370为透明玻璃材质,外仓361具有方便安装内仓370和杀菌器380的作用,杀菌器380具有方便通过紫外线灭菌灯382照射食物残渣进行杀菌消毒的作用,进料孔一211具有方便将食物残渣导入到粉碎装置200内部的作用,出料孔一233具有方便将下粉碎仓232内的食物残渣导出到导管一270内部的作用,导管一270具有方便将食物残渣导入到脱水装置300内的作用,止逆阀280具有防止脱水装置300中气流回流到粉碎装置200中的作用,支撑环231和隔板250具有方便分隔下粉碎仓232和上粉碎仓234的作用。
36.进一步的,下层粉碎器240位于下粉碎仓232内部,下层粉碎器240内壁均匀安装破碎刀一241,破碎刀一241为环形分布,破碎刀一241外壁均匀固定安装支撑架242,支撑架242内壁与伺服电机一220输出轴外壁固定连接,上层破碎器260位于上粉碎仓234内部,上层破碎器260表面均匀开设过滤孔261,上层破碎器260表面均匀固定安装破碎刀片二262,破碎刀片二262为直角梯形状,具体的,破碎刀一241具有方便打碎食物残渣的作用,过滤孔261具有方便将初步打碎后的食物通入到下粉碎仓232内的作用,支撑架242具有将下层粉碎器240安装到伺服电机一220输出轴外壁的作用,破碎刀片二262具有方便分级打碎食物残渣的作用。
37.进一步的,方形壳体310左侧外壁开设进料孔二320,进料孔二320端部固定安装托板330,托板330延伸至脱水仓360上方,进料孔二320与止逆阀280配合密封连接,方形壳体310右侧底部外壁固定安装出料槽350,出料槽350右端固定连接出料扁管351,外仓361底部开设出料孔二363,内仓370与外仓361之间通过连杆固定连接,内仓370底部外壁中心位置固定安装伺服电机三371,伺服电机三371输出端外壁固定安装刮板372,内仓370底部开设出料孔三373,出料孔三373底部固定连接导管二(图中未标注),导管二底部固定连接电磁阀374,电磁阀374底端与出料孔二363固定连接,外仓361和内仓370底部均匀开设排水孔,杀菌器380包括环形架381,环形架381固定安装在外仓361内壁上,环形架381表面均匀安装紫外线灭菌灯382,外仓361内壁与内仓370外壁之间固定连接密封环390,密封环390位于环形架381上方,具体的,进料孔二320具有方便将打碎后的食物残渣和水一起导入到脱水仓360内的作用,托板330具有方便食物残渣进入到脱水仓360内的作用,出料槽350具有方便将内仓370脱水后的食物导出设备的作用,出料扁管351具有导出食物残渣的作用,伺服电机三371具有方便驱动刮板372转动的作用,刮板372在脱水工作时,方便封闭出料孔三373的作用,在脱水结束后,方便通过驱动刮板372时推动食物残渣进入到出料孔三373的作用的作用,电磁阀374具有控制导管二通断的作用,环形架381具有方便安装紫外线灭菌灯382的作用,紫外线灭菌灯382具有方便对食物残渣进行消毒的作用,密封环390具有方便密封
外仓361和内仓370顶部连接处的作用,防止杂物落入到内仓370和外仓361之间的空腔内。
38.一种回收型智能厨余垃圾处理方法,包括具体操作步骤如下:
39.s1:将厨余垃圾进行分类,将可喂食家禽的剩余食物挑选出来,然后将食物置入到传送带100顶部,通过传送带100将食物运输到粉碎装置200内,随后食物在传送带100尽头下落到粉碎仓230内部,然后进入到上粉碎仓234内,通过驱动伺服电机一220,通过伺服电机一220驱动上层破碎器260和下层粉碎器240同步转动,通过上层破碎器260将通入到上粉碎仓234内的食物搅拌并进行破碎,随后食物残渣通过过滤孔261进入到隔板250顶部,随后穿过隔板250进入到下粉碎仓232内,通过下层粉碎器240再次将食物进一步打碎,随后食物残值和混合在其中的水分一起通过导管一270、止逆阀280进入到脱水装置300内;
40.s2:导管一270传来的食物残渣和水的混合物一起落入到托板330上,随后进入到内仓370内部,通过驱动伺服电机三371,使得脱水仓360转动,在离心力作用下,食物残渣中的水分与食物进行分离,随后水分通过内仓370和外仓361底部的排水孔排出,最后通过方形壳体310底部排水孔排出;
41.s4:在脱水装置300脱水工作时,同步打开杀菌器380,通过紫外线灭菌灯382照射内仓370,从而对内仓370内部的食物进行杀菌消毒;
42.s5:在脱水结束后,通过伺服电机二将脱水仓360调节好位置,使得导管二位于出料槽350上方,通过驱动伺服电机三371,从而通过刮板372刮动内仓370内食物,使得食物通过出料孔三373排出到导管二内,随后通过出料槽350和出料扁管351排出,随后通过外置打包机进行打包。
43.以上,仅是本发明的较佳实施例,任何熟悉本领域的技术人员均可能利用上述阐述的技术方案对本发明加以修改或将其修改为等同的技术方案。因此,依据本发明的技术方案所进行的任何简单修改或等同置换,尽属于本发明要求保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1