一种配网架空线路绝缘端子脏污清洗设备的制作方法
1.本发明涉及条码识读技术领域,具体为一种配网架空线路绝缘端子脏污清洗设备。
背景技术:
2.受盐雾及工业污染的影响,沿海地区多处于高温高湿高盐雾重度污染区域,污秽等级较高,配电线路及线路不可表面地发生污闪故障,严重威胁到配电网设备的安全稳定运行。严重、大面积、长期或突发性的污秽沉积是配电网设备发生频繁停电的重要原因之一。
3.配电线路污闪主要是由于电源表面附着的污秽物受环境条件影响,导致其表面的绝缘性能下降,并且不断出现放电的一种现象。配电线路是由多个小部分共同组合而形成的,其中主要的部分是绝缘端子。绝缘端子是高压配电线路的一种绝缘控件,在架空的配电线路中发挥着重要的绝缘作用的同时,还有支撑导线和防止电流回流的作用。而污闪会导致绝缘端子的绝缘水平降低,严重时会严重影响绝缘端子的绝缘作用,造成电流回流、电线的降容抗作用受到影响,从而会导致电流损失增加,发生某些特殊状况,如遭到雷击、导致线路跳闸等严重的影响。
4.传统的解决方案是人工对绝缘端子污闪进行清洗,传统的高电压配电线路上的带电作业由人工完成存在较高的风险,由于作业环境为高空,其危险性大,容易引发人身伤亡事故;
5.人工作业不仅效率较低,而且极可能出现操作不规范导致作业未达到预期的需求,从而导致高电压配电线路不能正常工作,以致产生无法预料的风险。
技术实现要素:
6.本发明的目的在于提供一种配网架空线路绝缘端子脏污清洗设备,以解决上述背景技术中提出的人工清洗绝缘端子不仅效率而且危险性大的问题。
7.为实现上述目的,本发明提供如下技术方案:
8.一种配网架空线路绝缘端子脏污清洗设备,包括图像识别系统、架设在绝缘斗臂车平台上的机械手臂和摄像头;
9.所述摄像头用于获取平台周围设定范围内绝缘端子图像信息;
10.所述图像识别系统用于接收绝缘端子图像信息进行判断将设定范围内的绝缘端子分为有污渍绝缘端子和无污渍绝缘端子,并将有污渍绝缘端子的空间坐标信息发送给所述机械手臂;
11.所述机械手臂上安装有清扫机构、清洗机构和喷涂机构,所述机械手臂驱动清扫机构、清洗机构和喷涂机构移动至获取的空间坐标位置,对有污渍绝缘端子进行清扫、清洗和喷涂工作。
12.优选的,所述机械手臂包括安装在底座顶部的x向移动装置、安装在x向移动装置
上的a轴旋转装置、安装在a轴旋转装置上的y向移动装置、安装在y向移动装置上的z向移动装置。
13.优选的,所述底座底部安装有水箱组件以及包裹水箱组件的绝缘工作斗。
14.优选的,所述清扫机构、清洗机构和喷涂机构均安装在z向移动装置上同步移动。
15.优选的,所述清扫机构包括y轴滑台、从y轴滑台上沿y向延伸的清扫支架、安装在清扫支架自由端的清扫轮、安装在清扫支架上用于驱动清扫轮转动的清扫驱动。
16.优选的,所述y轴滑台上固定有回转支座,所述清扫支架通过回转驱动相对回转支座旋转配合。
17.优选的,所述清扫轮有两组以上,所述清扫驱动通过同步带组件驱动同步转动。
18.优选的,所述清洗机构包括清洗喷头以及驱动清洗喷头沿z向移动的清洗伸缩装置。
19.优选的,所述喷涂机构包括喷涂喷头以及驱动喷涂喷头沿z向移动的喷涂伸缩装置。
20.优选的,所述图像识别系统包括:
21.数据集制作模块:用于收集电力现场绝缘端子图像数据,对绝缘端子图像数据进行人工标注,包括污渍标注框的位置坐标p和污渍类别;根据标注框的大小计算块状污渍面积,按污渍面积是否小于预设的污渍标准大小,将绝缘端子图像分为有污渍绝缘端子图像和无污渍绝缘端子图像;
22.数据增强模块:根据污渍标注框的位置坐标从有污渍绝缘端子图像中截取出污渍图像,将截取出的至少一污渍图像复制到无污渍绝缘端子背景图像中,进行有污渍绝缘端子图像的数据扩增;对数据扩增后的有污渍绝缘端子图像进行数据增强处理,得到高分辨率绝缘端子污渍图像数据集;
23.yolo v5模型:将高分辨率绝缘端子污渍图像数据集中的图像输入至yolo v5模型,通过backbone模块对输入图像进行图像分块,采用滑动窗口的方法,事先给定窗口大小和移动步长,若窗口中含有污渍则保留分块图作为特征图,若不包含,则不保留分块图;将特征图输入到neck网络中进行特征融合处理,得到检测图;将检测图输入到head网络中进行预测,通过head网络输出预测污渍位置坐标p’,构建损失函数计算预测污渍位置坐标p’与对应输入图像中污渍标注框的位置坐标p的损失值,基于计算出的损失值进行反向传播调节网络权重参数,进行迭代训练获得绝缘端子污渍检测模型;
24.检测模块:用于对现场绝缘端子进行污渍检测。
25.与现有技术相比,本发明的有益效果是:
26.通过机械臂携带摄像机对高压线处的绝缘端子进行图像采集,对采集到的图片进行检测,判断其污渍程度,若检测结果含有污渍,驱动机械臂运行至绝缘端子处进行清洗等工作。即通过采集图像对污渍进行识别,自动完成污渍清扫工作并将必要的图片资料传给工程师;
27.机器人运用本方案的算法对绝缘端子污闪进行清洗,可避免人工判断绝缘端子油渍程度带来的巨大工程量,也可避免机器人没有进行图像识别对绝缘端子造成进行的清洗,不仅提高工程量且效率低下;机器清洗有利于清洗达到预期的需求,解决了传统的高电压配电线路上的带电作业由人工完成带来的风险,减小人为作业带来的风险性。
28.能精确、有效的实现不同类型、多场景的线路防污闪治理要求,提高作业效率,减小人为作业的风险性,有效降低配电架空线路的跳闸等故障几率。
附图说明
29.为了更清楚地说明本发明实施例的技术方案,下面将对实施例描述所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
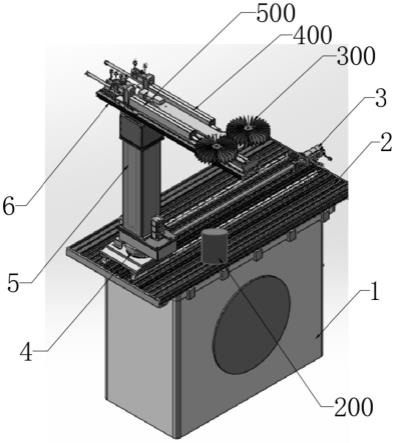
30.图1为本发明结构示意图;
31.图2为本发明底座和x向移动装置示意图;
32.图3为本发明a轴旋转装置结构示意图;
33.图4为本发明y向移动装置结构示意图;
34.图5为本发明z向移动装置上部件配合结构示意图;
35.图6为本发明清扫机构结构示意图;
36.图7为图1去除绝缘工作斗和摄像机后另一个方向结构示意图。
37.1、绝缘工作斗;2、底座;3、x向移动装置;4、a轴旋转装置;5、y向移动装置;6、z向移动装置;7、水箱组件;200、摄像头;300、清扫机构;301、回转支座;302、回转驱动;303、清扫支架;304、清扫轮;305、同步带组件;306、清扫驱动;307、y轴滑台;400、清洗机构;401、清洗伸缩装置;402、清洗喷头;500、喷涂机构;501、喷涂伸缩装置;402、喷涂喷头。
具体实施方式
38.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
39.因此提出在绝缘斗臂车的平台上安装一清洗机械臂,通过机械臂携带相机对高压线处的绝缘端子进行图像采集,判断其污渍程度,若检测结果含有污渍,驱动机械臂运行至对应绝缘端子处进行清洗等工作,从而实现减小人为作业带来的风险性;
40.若没有进行图像采集判断污渍程度,直接进行清洗,工程量较大,存在工作效率低下,无效清洗的情况;若使用者通过采集的图像人工判断油渍程度,不仅存在判断误差且判断效率低下。
41.绝缘工作斗1安装在绝缘斗臂车的平台上,底座2通过卡块可拆卸安装在绝缘工作斗1顶部,底座2底部安装有水箱组件7和控制柜等,水箱组件7和控制柜等相对位于绝缘工作斗1内部;摄像头200(可任意调节方向)安装在底座2顶部。
42.x向移动装置3可采用丝杆传动机构和igus滑动导轨系统安装在底座2顶部,x向移动装置3带动a轴旋转装置4沿x向直线移动调节位置;
43.y向移动装置5可采用丝杆传动机构和igus滑动导轨系统安装在a轴旋转装置4顶部,a轴旋转装置4带动y向移动装置5绕y轴方向旋转;
44.z向移动装置6可采用丝杆传动机构和igus滑动导轨系统安装在y向移动装置5顶
部,y向移动装置5带动z向移动装置6沿y方向直线升降;
45.清扫机构300、清洗机构400和喷涂机构500安装在z向移动装置6顶部,z向移动装置6带动清扫机构300、清洗机构400和喷涂机构500沿z方向直线移动;
46.从而清扫机构300、清洗机构400和喷涂机构500通过x向移动装置3、a轴旋转装置4、y向移动装置5和z向移动装置6实现x、y、z方向调节结构。
47.清洗伸缩装置401和喷涂伸缩伸缩装置501均可采用电动伸缩杆沿z向直线伸缩;
48.清洗伸缩装置401输出端的清洗喷头402通过水管与水箱组件7中的水箱连接,水箱中的水通过水泵加压由水管输送并经过y型过滤器过滤后从清洗喷头402喷出;水泵采用pm-362的三相大功率水泵,清洗喷头402可采用35度扇形喷头喷射面积广;
49.喷涂伸缩伸缩装置501输出端的喷涂喷头502通过喷涂管与水箱组件7中的涂料箱连接,涂料箱中的prtv防污闪涂料通过型号为zs200的喷涂机加压经过喷涂管输送并经过y型过滤器过滤后从喷涂喷头502喷出。
50.回转驱动302可采用减速电机安装回转支架301上,回转支架301固定在y轴滑台307顶部,清扫支架303安装在减速电机的输出轴,两组清扫轮304并列安装在清扫支架303右端,从而回转驱动302带动清扫支架303上的两组清扫轮304绕z轴旋转;清扫驱动306可采用减速电机通过同步带组件305带动两组清扫轮304同步旋转。
51.prtv防污闪涂料是用于喷涂在运行绝缘子外表面上的一种常温固化硅橡胶涂料,主要是利用其具有的优异的憎水性和憎水迁移性来抑制污秽黏附于绝缘子表面,从而提高绝缘子的防污能力。
52.整个控制系统的核心采用omron的nj系列,omron系列的电源模块,cpu以及输入,输出模块之间采用同系列的背板进行连接。与上位pc之间的远程连接采用无线通讯模块,型号为dtd418ma,无线通讯模块在pc端和图像识别系统的控制单元处各一块,从而可以进行100m-200m的远程通讯;与下位驱动器之间的连接是通过omron系列的ethercat电缆,型号为xs6w-6lszh8ss50cm-y;驱动器与驱动器之间的通讯方式时ethercat,每个驱动器还需接入外部传感器信号至其控制端子口;驱动器与对应伺服电机之间的连接使用的是汇川伺服电机自带的编码器电缆和动力电缆。
53.yolo v5是基于卷积神经网络的一种深度处理图像模型,其主要由输入端、backbone模块、neck网络、head网络和输出端。
54.输入端是将采集到的图片通过mosaic数据增强,对图片进行随机缩放、随机采集、随机排布等方式进行拼接,使得模型在面对不同角度,不同尺度得到的图片都能够做出正确的判断,另外在这一模块,模型针对不同的检测目标会设置初始设定长宽的锚框,在对网络进行训练时,在初始锚框的基础上输出预测框,和真实框进行对比,计算两者差距,再反向更新,迭代网络参数,自适应的计算不同训练集中的最佳锚框值,从而确定锚框的具体位置和大小,另外为了使用不同长宽的图像检测,在这一模块中将原始图片同一缩放到一个标准尺寸再送入检测网络中对图片进行检测。
55.backbone模块:首先通过focus模块,对输入端处理过的图片进行分块切片操作,将输入通道扩充了4倍,使信息不丢失的情况下提高计算力,再通过csp1_x结构,对特征图进行两部分操作,一部分进行卷积操作,另一部分和上一部分卷积操作的结果进行contate,有效的增强了网络学习的能力同时降低了计算量。
56.neck网络:通过fpn-pan结构对特征图中不同阶段信息进行融合,fpn层自顶向下传达强语义特征,pan塔自底向上传达定位特征,同时采用csp2结构,加强了网络的特征融合能力,增强网络学习特征的能力。
57.head网络:采用ciou_lossz作为bounding box的损失函数,将预测框和实际框的长宽比、重叠面积、中心点距离均考虑到,从而确定目标检测的位置。
58.使用labelimg工具对绝缘端子图像数据进行人工标注,包括污渍标注框位置坐标p和污渍类别。其中p=(x1,x2,y1,y2),其中(x1,y1),(x2,y2)分别代表图像左上角与右下角坐标。
59.根据污渍标注框的大小计算块状污渍面积,根据污渍标注框的大小计算污渍大小是指:我们在对采集到的图片用标注框进行标注时,要根据污渍的大小进行标注,标注框的大小接近于图片中污渍的大小,然后计算标注框的大小,将图片中标注框所占的像素值与实际中污渍面积转换一下,按污渍像素面积是否小于污渍标准大小,将绝缘端子分为有污渍和无污渍绝缘端子。提取有污渍图像中污渍的位置坐标,再将对应坐标的污渍截取下来,完成目标对象对应的精确像素的复制。将事先准备好的不包含污渍的绝缘端子图片作为背景图,再把复制好的有污渍目标黏贴至背景图中,每张背景图中黏贴的目标个数可以自行设定。
60.将进行数据扩增后得到的高分辨率绝缘体污渍数据集进行图像分块(因为一般图像采集所用的工业相机分辨率很高,所得图片很大,直接进行处理会很慢,要先进行分块处理)。采用滑动窗口的方法,事先给定窗口大小和移动步长,若窗口中含有污渍则保留分块图作为最终数据集,若不包含,则不保留分块图。及原图大小为w1*h1,滑动窗口大小为w2*h2,移动窗口移动步长为d,污渍标注框位置坐标为p=(x1,y1,x2,y2),执行分块操作后的污渍标注框坐标位置为p1=(x
′1,y
′1,x
′2,y
′2),p1的位置坐标计算公式为:
61.x
′1=x
1-i*d
62.y
′1=y
1-j*d
63.x
′2=x
2-i*d
64.y
′2=y
2-j*d
65.其中,i为滑动窗口像右滑动次数,j为滑动窗口向下滑动次数。
66.网络在训练时将训练图片分为k*k个网格,每个网格负责预测b个锚框,预测值与目标位置之间的转换公式为:
67.x=σ(t
x
)+c
x
#
68.y=σ(ty)+cy#
[0069][0070][0071]
其中t
x
和ty为预测框中心坐标距网格左上点坐标的距离、tw和th为预测框与锚框宽和高的缩放系数,aw与ah为锚框的宽与高,c
x
与cy为锚框所处网格的左上点坐标以及评判是否存在目标的置信度conf,网络预测出的预测污渍位置中心点坐标即为(x,y),w与h为预测框的宽与高。
[0072]
对污渍标注框位置坐标p采用giou loss作为位置回归损失函数,位置回归损失l
box
计算如下:
[0073][0074]
其中,λ
coord
为位置损失系数。目标真实的中心坐标,为目标真实的宽度与高度。若在(i,j)处的锚框包含目标,则值为1,否则该值为0。
[0075]
检测前将采集到的绝缘端子图像分割为指定大小的图片,分割方法采用移动窗口法,分割大小与高分辨率绝缘体污渍数据集进行图像分块中的训练图像大小一致。采集图片大小为w1*h1,分割后大小为w2*h2,移动窗口移动步长为d。采集一张布片后的分割图片总数为m,m的计算公式如下,其中指对x进行向上取整。
[0076][0077]
将分割后的图片标记为s
ij
,检测时,s
ij
被批量输入至网络进行检测。
[0078]
检测到图片s
ij
中污渍p2且坐标为(x,y)时,需将分割后的图片拼接显示于图像检测软件界面并记录最终污渍位置坐标p2’=(x
′
,y
′
),其中(x
′
=x+i*d)、(y
′
=y+j*d)。
[0079]
工作流程:绝缘斗臂车将本设备移动至配电线路,通过摄像头拍摄附近配电线路的绝缘端子图像信息,将拍摄到的绝缘端子图像信息输送至图像识别系统进行识别,判断出绝缘端子为有污渍绝缘端子或无污渍绝缘端子,并记录有污渍绝缘端子的空间坐标,机械臂根据空间坐标将清扫机构300、清洗机构400和喷涂机构500移动对准有污渍绝缘端子;
[0080]
首先,z向移动装置6带动两组清扫轮304沿z向直线移动,使得两组清扫轮304相对位于有污渍绝缘端子对立两侧,之后清扫驱动306带动两组清扫轮304旋转对有污渍绝缘端子进行清扫;且可通过回转驱动302带动两组两组清扫轮304调节角度进一步对准有污渍绝缘端子,也可以在清扫的过程中来回转动一定角度提高清扫效果;
[0081]
z向移动装置6带动两组清扫轮304后退一段距离远离清扫后的有污渍绝缘端子,清洗伸缩装置401带动其输出端的清洗喷头402伸长避开两组清扫轮304,清洗喷头402喷出水对清扫后的有污渍绝缘端子进行清洗;
[0082]
之后清洗伸缩装置401带动其输出端的清洗喷头402缩短复位,喷涂伸缩装置501带动其输出端的喷涂喷头502伸长避开两组清扫轮304,喷涂喷头502喷出prtv防污闪涂料在清洗后的有污渍绝缘端子外表面。
[0083]
在本说明书的描述中,参考术语“一个实施例”、“示例”、“具体示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0084]
以上公开的本发明优选实施例只是用于帮助阐述本发明。优选实施例并没有详尽
叙述所有的细节,也不限制该发明仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本发明的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本发明。本发明仅受权利要求书及其全部范围和等效物的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1