一种定日镜清洗车的制作方法
1.本技术涉及一般清洗技术领域,尤其涉及一种定日镜清洗车。
背景技术:
2.定日镜是一种将太阳或其他天体的光线反射到固定方向的光学装置,又称定星镜。定日镜广泛应用于光热发电领域,其原理为将太阳光聚集到吸热器上。由于定日镜设置于室外环境,所以其表面极容易积累灰尘。然而,定日镜镜面的清洁度会影响镜面的反射率,降低吸热器的入射能量。
3.因此,为了提高光热转换效率,需要定期对定日镜进行清洗。通常,定日镜的清洗工作采用人工清洗的方式。但由于定日镜的体积较大,采用人工清洗的方式需要配置大量的作业人员,且耗水量较大。
4.为了减少耗水量,还采用片上机器人清洗的方式。片上机器人通过在镜面上行走,进而完成定日镜的清洗工作。然而,当定日镜镜面为非连续性镜面时,片上机器人则无法正常完成镜面的清洗工作,导致整体的作业效率低下。
技术实现要素:
5.本技术提供了一种定日镜清洗车,以解决定日镜清洗的作业效率低下的问题。
6.本技术提供的定日镜清洗车,包括:车体、控制柜、供水机构、发电机组、清洗机构以及机械臂,其中:
7.所述车体包括牵引车与拖车机构;所述牵引车包括车轮与车架;所述车轮上设有轮速检测装置,所述轮速检测装置包括轮速传感器与信号盘;所述信号盘固定于所述车轮的轮轴,所述信号盘与所述轮速传感器连接,所述轮速传感器固定与所述牵引车上;所述轮速传感器与所述控制柜电连接;所述车架与所述拖车机构可拆卸连接;
8.所述清洗机构包括清洗架、清洗组件与刮板组件,所述清洗架表面设有超声波传感器,所述清洗组件固定于所述清洗架上;所述刮板组件包括刮板与刮板调整机构,所述刮板调整机构包括刮板安装座、刮板固定座与定力弹簧,所述刮板安装座通过所述定力弹簧与所述刮板固定座连接,所述刮板固定座与所述清洗架连接;
9.所述供水机构、所述控制柜与所述发电机组固定于所述拖车机构上,所述供水机构包括水泵、水管与水箱,所述水泵与所述水管、所述水箱连接,所述水管与所述清洗组件连接;所述发电机组与所述控制柜电连接,所述控制柜与所述清洗组件、所述水泵、所述机械臂、所述超声波传感器电连接;所述机械臂的一端固定于所述车架上,所述机械臂的另一端与所述清洗架固定连接。
10.通过所述定日镜清洗车,可以实现对定日镜全方位的清洗工作,以提高定日镜清洗效率。
11.可选的,所述机械臂包括机械臂底座、回转支撑总成、支撑臂、伸缩臂与清洗机构连接板;所述机械臂底座固定于所述车架上,所述机械臂底座与所述回转支撑总成连接,所
述支撑臂与所述回转支撑总成连接。
12.所述伸缩臂包括伸缩内臂与伸缩外臂,所述支撑臂与所述伸缩外臂之间设有举升电缸,所述举升电缸与所述支撑臂、所述伸缩外臂固定连接;所述伸缩外臂与所述支撑臂连接;所述伸缩内臂与所述伸缩外臂之间设有伸缩电缸,所述伸缩电缸与所述伸缩内臂、所述伸缩外臂固定连接;所述伸缩内臂的一端套接于所述伸缩外臂内,所述伸缩内臂的另一端与所述清洗机构连接板连接;所述伸缩内臂表面设有摆动电缸,所述摆动电缸与所述清洗机构连接板连接。所述机械臂的姿态调节灵活,可满足多种位置情况下的定日镜的清洗工作。
13.可选的,所述伸缩外臂表面还设有导向机构;所述导向机构包括滑块与滑块安装板;所述滑块固定于所述滑块安装板上,所述滑块安装板上设有侧安装孔与下安装孔,以便于更换所述机械臂所述滑块。
14.可选的,清洗组件包括喷水管路、喷头与清洗罩,所述喷水管路固定于所述清洗架两侧,所述喷头与所述喷水管路连接,所述清洗罩固定于所述清洗架外侧,以避免清洗过程中发生水雾四溅的情况。
15.可选的,所述喷水管路包括冲击喷水管路与雾化喷水管路,所述喷头包括冲击喷头与雾化喷头;所述冲击喷头与所述冲击喷水管路连接,所述雾化喷头与所述雾化喷水管路连接,以实现多种喷淋模式的清洗。
16.可选的,所述清洗机构还包括喷枪,所述喷枪与所述水泵、所述控制柜连接,以便于作业人员进行人工清洗工作。
17.可选的,所述清洗架上还设有滚刷与滚刷电机,所述滚刷的轴与所述滚刷电机的空心轴通过平键连接,所述滚刷电机与所述控制柜电连接,以实现对定日镜镜面的刷洗工作。
18.可选的,所述滚刷上还设有滚刷转速传感器,所述滚刷转速传感器与所述控制柜电连接,以监测滚刷的工作状态。
19.可选的,所述清洗架表面还设有限位开关,所述限位开关与所述控制柜电连接,以避免清洗架碰撞定日镜镜面。
20.可选的,所述刮板固定座与所述清洗架之间还设有刮板升缩杆;所述刮板升缩杆的一端固定于所述清洗架上,所述刮板升缩杆的另一端固定于所述刮板固定座上,以便于抬起或降低所述刮板。
21.由以上技术方案可知,本技术提供一种定日镜清洗车,所述定日镜清洗车包括车体、控制柜、供水机构、发电机组、清洗机构以及机械臂,其中:所述车体包括牵引车与拖车机构,所述牵引车与所述拖车机构可拆卸连接。所述清洗机构包括清洗架、清洗组件与刮板组件,所述清洗架表面设有超声波传感器,所述清洗组件固定于所述清洗架上。所述刮板组件包括刮板与刮板调整机构,所述刮板调整机构包括刮板安装座、刮板固定座与定力弹簧,所述刮板安装座通过所述定力弹簧与所述刮板固定座连接,所述刮板固定座与所述清洗架连接。所述供水机构、所述控制柜与所述发电机组固定于所述拖车机构上,所述供水机构包括水泵、水管与水箱,所述水泵与所述水管、所述水箱连接,所述水管与所述清洗组件连接。所述发电机组与所述控制柜电连接,所述控制柜与所述清洗组件、所述水泵、所述机械臂、所述超声波传感器电连接。所述机械臂的一端固定于所述牵引车上,所述机械臂的另一端
与所述清洗架固定连接。所述定日镜清洗车通过车体进行运输、移动,通过机械臂控制清洗机构,以对定日镜镜面进行全方位清洗,提高定日镜清洗工作的作业效率。
附图说明
22.为了更清楚地说明本技术的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
23.图1为本技术一些实施例提供的拖车机构的结构示意图;
24.图2为本技术一些实施例提供的机械臂的结构示意图;
25.图3为本技术一些实施例提供的导向机构的结构示意图;
26.图4为本技术一些实施例提供的刮板组件的结构示意图;
27.图5为本技术一些实施例提供的清洗组件的结构示意图;
28.图6为本技术一些实施例提供的带有清洗罩的清洗架结构示意图;
29.图7为本技术一些实施例提供的带有限位开关的清洗架结构示意图;
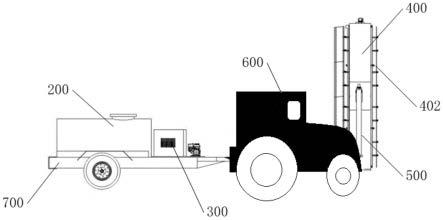
30.图8为本技术一些实施例提供的定日镜清洗车的结构示意图;
31.图9为本技术一些实施例提供的牵引车的剖视图。
32.图示说明:
33.其中,100-控制柜,200-供水机构,201-水泵,202-水管,203-水箱,300-发电机组,400-清洗机构,401-清洗架,4011-超声波传感器,4012-滚刷,4013-滚刷电机,4014-限位开关,4015-刮板伸缩杆,402-清洗组件,4021-冲击喷水管路,4022-雾化喷水管路,4023-冲击喷头,4024-雾化喷头,403-刮板组件,404-清洗罩,4031-刮板,4032-刮板安装座,4033-刮板固定座,4034-定力弹簧,4035-刮板调整机构,500-机械臂,501-机械臂底座,502-回转支撑总成,503-支撑臂,5041-伸缩内臂,5042-伸缩外臂,5043-滑块,5044-滑块安装板,5045-侧安装孔,5046-下安装孔,505-清洗机构连接板,506-举升电缸,507-伸缩电缸,508-摆动电缸,600-牵引车,601-轮速传感器,602-信号盘,603-车轮,604-车架,700-拖车机构。
具体实施方式
34.下面将详细地对实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下实施例中描述的实施方式并不代表与本技术相一致的所有实施方式。仅是与权利要求书中所详述的、本技术的一些方面相一致的系统和方法的示例。
35.定日镜(heliostat)是指将太阳或其他天体的光线反射到固定方向的光学装置,又称定星镜。定日镜通常应用于光热电站,将太阳光聚集到吸热器,进而实现太阳能发电。定日镜多数设置在戈壁、沙漠等阳光充足的地区。由于戈壁、沙漠地区常年处于风尘、风沙天气,导致定日镜表面极容易积累灰尘。而当定日镜表面积累灰尘时,其镜面反射率就会下降,进而影响光热转换效率,造成能量浪费。
36.为了提高光热转换效率,需要定期对定日镜进行清洗。在定日镜清洗工作过程中,采用人工清洗的方式需要配置大量的作业人员,且耗水量较大;采用片上机器人的方式受应用场景的限制,当定日镜镜面为非连续性镜面时,片上机器人无法正常完成镜面的清洗
工作,进而影响清洗效率。
37.为了解决以上问题,参见图8,本技术提供一种定日镜清洗车,所述定日镜清洗车包括:车体、控制柜100、供水机构200、发电机组300、清洗机构400以及机械臂500,其中:
38.所述车体包括牵引车600与拖车机构700,如图8所示,牵引车600与拖车机构700可拆卸连接。拖车机构700可采用挂车,在拖车机构700与牵引车600连接后,拖车机构700由牵引车600牵引移动。其中,拖车机构700设有轮胎。为了适应沙石、沙土地面,轮胎可采用着地面积大且胎面设有大块人字形花纹的轮胎,以避免发生车陷。
39.在一些实施例中,拖车机构700还包括减震系统,以缓解拖车机构700移动过程中晃动情况。比如,在拖车机构700中设置减震器等。
40.在一些实施例中,所述牵引车600可采用拖拉机车型。牵引车600内置柴油发动机、配备高压共轨技术。拖拉机车型具有动力充沛、地形适应性强、操作简单以及灵活等优点,适用于戈壁、沙漠等地区。
41.参见图9,所述牵引车600包括车轮603与车架604,车架604与拖车机构700可拆卸连接。所述牵引车600的车轮603上设有轮速检测装置,所述轮速检测装置包括轮速传感器601与信号盘602;所述信号盘602固定于所述车轮的轮轴,所述信号盘602与所述轮速传感器601连接,所述轮速传感器601固定与所述车架604上,所述轮速传感器601与所述控制柜100电连接。当车轮603转动时,轮速传感器601通过检测到的信号判断车轮603的速度。
42.所述供水机构200、控制柜100与发电机组300固定于拖车机构700上,以使供水机构200、控制柜100与发电机组300可以跟随牵引车600及拖车机构700同步移动,即拖车机构700为供水机构200、控制柜100与发电机组300提供支撑与运输的功能。其中,控制柜100为定日镜清洗车提供控制功能,供水机构200为提供供水功能,发电机组300为提供供电功能。
43.所述牵引车600与拖车机构700连接后,还与机械臂500固定连接。机械臂500的一端固定于牵引车600上,机械臂500的另一端与清洗机构400固定连接。即牵引车600与拖车机构700构成的车体结构通过机械臂500与清洗机构400连接,进而可以构成完整的定日镜清洗车结构。
44.所述清洗机构400包括清洗架401、清洗组件402与刮板组件403。清洗架401用于携带清洗组件402以及刮板组件403在定日镜镜面的上方移动,以完成对定日镜的清洗。所述机械臂500即与清洗机构400的清洗架401固定连接。
45.参见图6,清洗架401的表面设有超声波传感器4011。超声波传感器4011可采用方型、圆柱型和双张等超声波传感器4011。超声波传感器4011的工作原理为:超声波发射器向外面某一个方向发射出超声波信号,在发射超声波时刻的同时开始进行计时,超声波通过空气进行传播,传播途中遇到障碍物就会立即返射传播回来,超声波接收器在收到反射波的时刻就立即停止计时。然后,根据超声波在空气中的传播速度与计时时间,就可以测算出从发射点到障碍物之间的距离。如图6所示,清洗架401的两端各设有至少一个超声波传感器4011,以探测定日镜的镜面边缘,进而调整清洗位置。
46.所述清洗组件402固定于所述清洗架401上,清洗组件402用于对镜面进行喷水、清洗。参见图4,所述刮板组件403包括刮板4031与刮板调整机构4035。刮板调整机构4035包括刮板安装座4032、刮板固定座4033与定力弹簧4034。刮板4031用于在水洗作业后去除镜面残留的水渍。如图4所示,刮板安装座4032通过定力弹簧4034与刮板固定座4033连接,刮板
固定座4033与清洗架401连接。清洗过程中,可以通过定力弹簧4034调节刮板4031对镜面的压力,与镜面保持预设压力范围的接触。压力范围根据实际情况进行设定,设定的压力值范围不能过大,以防止损坏镜面。
47.例如:当清洗组件402整体相对于镜面位置发生变化时,刮板4031会倾斜一定角度,进而带动刮板安装座4032绕其自身的固定轴转动,同时拉动定力弹簧4034使刮板4031对镜面产生安全范围内的压力。在刮板4031相对于镜面位置有浮动时,定力弹簧4034可以随之调整刮板4031的位置,从而保证刮板4031对镜面的压力始终保持在一定的安全范围内。
48.在一些实施例中,所述刮板4031的数量可以为两个,分别设置于清洗架401行进方向的两端。在清洗架401进行清洗工作时,抬起靠近行进方向的刮板4031,下降另外方向的刮板4031,即可以使刮板4031去除镜面上清洗组件402残留的水渍。其中,刮板4031与镜面接触部分的末端可以采用硅胶刮板,以避免在镜面上留下划痕,影响镜面的折射率。
49.在一些实施例中,参见图7,所述刮板固定座4033与清洗架401之间还设有刮板升缩杆4015。所述刮板升缩杆4015的一端固定于清洗架401上,刮板升缩杆4015的另一端固定于刮板固定座4033上。刮板升缩杆4015可以采用电动升缩杆,实现抬起或降低所述刮板4031。所述刮板升缩杆4015可以控制刮板4031的抬起和降下,在工作时,所述控制柜100被配置为抬起行进方向前端的刮板4031,降下后端的刮板4031进行刮水作业。
50.在一些实施例中,参见图7,所述清洗架401上还设有滚刷4012与滚刷电机4013。滚刷4012轴与滚刷电机4013空心轴通过平键连接,且滚刷电机4013与控制柜100电连接,以使滚刷电机可以为滚刷4012提供电能以及可以通过控制柜100控制滚刷4012的启停。如图7所示,滚刷4012可以横跨且固定于清洗架401的中心位置。超声波传感器4011在检测出定日镜镜面的边缘后,作业人员通过控制柜100对清洗架401的位置进行调整,以使整个滚刷4012可以覆盖镜面上。
51.例如:滚刷4012为圆柱形结构,滚刷的长度为x米,镜面的宽度为x米,镜面的长度为y米。那么,在控制清洗架401进行清洗作业时,首先根据超声波传感器4011探测出镜面的边缘位置,然后调整清洗架401的位置,使滚刷4012的两端与镜面宽度方向的边缘位置对齐。在滚刷4012的两端与镜面宽度方向的边缘位置对齐后,沿镜面的长度方向移动y米,即可完成该镜面一个回合的滚刷清洁工作。
52.在一些实施例中,滚刷4012上还设有滚刷转速传感器,所述滚刷转速传感器与控制柜100电连接,从而可以监测滚刷4012的工作状态。当滚刷4012发生了卡滞等故障时,滚刷的转速就会降低或变为零。此时,滚刷转速传感器可以及时将滚刷4012异常的转速情况反馈至控制柜100。控制柜100可以通过显示屏显示、语音报警或灯光报警等方式进行报警,以提示工作人员进行检修。
53.基于上述实施例,当靠近定日镜镜面端的超声波传感器4011探测到镜面时,由于滚刷4012距离超声波传感器4011有一定距离,滚刷4011尚未进入定日镜镜面上方区域。此时,如果清洗组件402即开始喷水,则会造成水资源浪费。本技术实施例中,控制柜100可以被配置为将轮速传感器601检测到的轮速与当前用时时间结合,计算当前行进距离,判断滚刷4012是否进入定日镜镜面上方区域。当所述行进距离等于滚刷4012与超声波传感器4011间的距离时,控制柜100控制清洗组件402开始喷水。
54.同理,当滚刷4012完成清洗作业准备离开定日镜镜面时,也可以根据当前行进距离判断何时关闭清洗组件402,以避免水资源浪费,实现节水。
55.此外,在一些实施例中,控制柜100还被配置为根据轮速传感器601检测的轮速信息,预估滚刷4012靠近镜面和离开镜面的目标时间。在所述目标时间后,停止滚刷4012的运动,进而可以确保在滚刷4012在进入镜面区域时已经贴近镜面,可以正常进行清洗工作,同时降低滚刷4012提前靠近镜面撞坏镜面的风险;以及,在滚刷4012离开镜面区域时不会提前离开,避免存有未清洗到的镜面区域。
56.在一些实施例中,所述清洗架401表面还设有限位开关4014,所述限位开关4014与控制柜100电连接。限位开关4014是一种常用的小电流主令电器,其原理为利用生产机械运动部件的碰撞,使其触头动作来实现接通或分断控制电路,从而达到一定的控制目的。在清洗架401靠近镜面的底端设置限位开关4014,如果清洗架401触碰到定日镜镜面,限位开关4014就会被触发,清洗架401则自动向反方向移动并将碰撞信息发送至控制柜100,避免清洗架401再次触碰镜面,具有防碰撞保护作用。
57.例如:如图7所示,清洗架401靠近镜面的底端上设置有3个限位开关4014,当其中任意一个限位开关4014被触发时,清洗架401则保持现有的角度,自动向被触发的限位开关4014的反方向移动,进而对定日镜的镜面进行保护。
58.在一些实施例中,清洗组件402包括喷水管路、喷头与清洗罩404。其中,喷水管路固定于清洗架401两侧,喷头与喷水管路连接,清洗罩404固定于清洗架401外侧。喷头及喷水管路用于向定日镜镜面上进行喷水工作;清洗罩404用于将喷头、喷水管路以及定日镜镜面构成的空间隔离为密闭空间,以防止水雾外泄,干扰其他设备工作。
59.其中,喷水管路可以包括冲击喷水管路4021与雾化喷水管路4022,喷头包括冲击喷头4023与雾化喷头4024。冲击喷头4023与冲击喷水管路4021连接,雾化喷头4024与雾化喷水管路4022连接,以实现多模式下的喷淋工作。
60.例如:在高压喷淋冲洗模式下,滚刷4012不转动,冲击喷头4023与冲击喷水管路4021进行冲击喷水的工作,以向镜面喷洒高压水柱,进行清洁。
61.又例如:如图7所示,清洗架401的两端均布置有雾化喷头4024与雾化喷水管路4022。在常规喷淋刷洗模式下,首先,行进方向前端的雾化喷头4024进行喷水,以润湿镜面。然后,清洗架401中心位置的滚刷4012进行转动刷洗。最后,行进方向后端的雾化喷头4024进行二次冲洗,冲走镜面残留的脏污物。
62.在一些实施例中,冲击喷头4023可以采用扇形高压喷嘴,雾化喷头4024可以采用扇形喷嘴。扇形喷嘴具有压力适应范围大,不易堵塞,且布水均匀的优点。
63.例如:如图5所示,在单排布置25个扇形高压喷嘴,喷嘴压力8mpa,靶距为200mm,则可以覆盖5m长度的镜面清洗范围。在扇形高压喷嘴对镜面进行冲洗后,通过行进方向后端的刮板4031,刮去镜面残留的水渍及脏污物。
64.所述喷水管路4021与雾化喷水管路4022主要由供水机构200提供水源。参见图1,供水机构200包括水泵201、水管202与水箱203。其中,水泵201分别与水管202、水箱203连接,水管202与清洗组件402连接。水泵201可以将水箱203中的水抽出,并通过水管202传输至清洗组件402。由于清洗工作量较大,应采用大容量的水箱203。一般情况下,水箱203需提供不少于3.5t的水量。如图1所示,以拖车机构700连接牵引车600的方向为前,控制柜100与
发电机组300可以设置于拖车机构700上水箱203前方的区域,以便于作业人员控制操作定日镜清洗车,进行清洗工作。
65.由于定日镜的清洗工作需要长期进行,所以在严寒天气下还需对水箱203中的水加热或保温。因此,在一些实施例中,发电机组300选用不少于60kw的电源,从而满足严寒天气下定日镜清洗车的供水及供热的需求。
66.在一些实施例中,水泵201采用双水泵设计,例如:采用40kw大功率水泵及10kw小功率水泵的组合。双水泵设计可以满足多模式的清洗工作,比如喷淋以及人工清洗等清洗方式。
67.为了便于人工清洗作业,在一些实施例中,所述清洗机构400还包括喷枪,所述喷枪与水泵201、所述控制柜100连接。喷枪应选用高压喷枪,以使作业人员可以握持高压喷枪对镜面进行冲洗。
68.参见图2,在一些实施例中,所述机械臂500包括机械臂底座501、回转支撑总成502、支撑臂503、伸缩臂与清洗机构连接板505。其中,机械臂底座501固定于牵引车600上。如图2所示,机械臂底座501与回转支撑总成502连接,支撑臂503与回转支撑总成502连接。回转支撑总成502为负责旋转支撑臂503的部件,其内部设有滚动体以及带滚道的套圈,根据滚动体与套圈的配合即可以实现旋转操作。控制柜100可以控制回转支撑总成502进行旋转,以使支撑臂503跟随回转支撑总成502进行旋转。
69.伸缩臂包括伸缩内臂5041与伸缩外臂5042,支撑臂503与伸缩外臂5042之间设有举升电缸506,举升电缸506与所述支撑臂503、伸缩外臂5042固定连接。其中,伸缩外臂5042还与支撑臂503连接,即伸缩外臂5042与支撑臂503之间可以通过铰点连接。在作业过程中,伸缩外臂5042可以通过举升电缸506提供的动力,相对于支撑臂503的位置在竖直平面内进行抬起或降低的操作。
70.此外,伸缩外臂5042与伸缩内臂5041之间还设有伸缩电缸507,伸缩电缸507与伸缩内臂5041、伸缩外臂5042固定连接。其中,伸缩内臂5041的一端套接于所述伸缩外臂5042内,伸缩内臂5041的另一端与清洗机构连接板505连接。显然,伸缩内臂5041也可以通过伸缩电缸507提供的动力,在伸缩外臂5042内进行伸缩。
71.在一些实施例中,如图2所示,所述伸缩外壁5042的底端设有回转支撑,以使整个伸缩臂可以带动清洗机构400整体旋转180
°
,从而可以清洗所述车体另一侧的定日镜镜面,实现双侧镜面清洗。
72.然而,伸缩内臂5041在来回进行伸缩时,需要通过导向滑块进行伸缩路线的引导。但由于机械臂500在作业过程中,需要不断地重复伸缩操作,导致导向滑块的磨损较为严重,不利于进行后期的工作。因此,在一些实施例中,所述伸缩外臂5042的表面还设有导向机构。参见图3,导向机构包括滑块5043与滑块安装板5044,滑块5043固定于滑块安装板5044上;滑块安装板5044上设有侧安装孔5045与下安装孔5046,以通过在侧安装孔5045与下安装孔5046内设置螺钉,将滑块5043与滑块安装板5044固定在伸缩外臂5042与伸缩电缸507之间。因此,当滑块5043出现过度磨损时,即可以将安装螺钉拧下,取下滑块安装板5044,更换滑块5043。其中,侧安装孔5045与下安装孔5046两个不同位置安装孔的设计,可以加固整个导向机构的固定情况,以防止导向机构脱落。
73.在一些实施例中,伸缩内臂5041的表面还设有摆动电缸508,摆动电缸508与清洗
机构连接板505连接。清洗机构连接板505用于连接清洗架401,摆动电缸508可以为伸缩内臂5041提供水平方向的摆动的动力,进而调整与之连接的清洗架401的位置。
74.由以上技术方案可知,本技术提供一种定日镜清洗车,包括:车体、控制柜100、供水机构200、发电机组300、清洗机构400以及机械臂500。所述车体包括牵引车600与拖车机构700,牵引车600与拖车机构700可拆卸连接。清洗机构400包括清洗架401、清洗组件402与刮板组件403,所述清洗架401表面设有超声波传感器4011,清洗组件402固定于清洗架401上。刮板组件403包括刮板4031与刮板调整机构4035,所述刮板调整机构4035包括刮板安装座4032、刮板固定座4033与定力弹簧4034,刮板安装座4032通过定力弹簧4034与刮板固定座4033连接,所述刮板固定座4033与清洗架401连接。所述供水机构200、控制柜100与发电机组300固定于拖车机构700上,供水机构200包括水泵201、水管202与水箱203。所述水泵201与水管202、水箱203连接,水管202与清洗组件402连接。所述发电机组300与控制柜100电连接,控制柜100与清洗组件402、水泵201、机械臂500、超声波传感器4011电连接。所述机械臂500的一端固定于牵引车600上,机械臂500的另一端与清洗架401固定连接。所述定日镜清洗车通过车体进行运输、移动,通过机械臂500控制清洗机构400对定日镜镜面进行全方位清洗,以提高定日镜清洗的作业效率。
75.本技术提供的定日镜清洗车,整车装置结构紧凑、小巧,易于维护;机械臂500具有4个自由度,机械臂500姿态调节灵活,姿态丰富,可满足多种清洗方案;通过滑块安装板5044可以对滑块进行更换,提高了伸缩臂的作业质量;通过刮板组件403对刮板4031的倾斜角度进行调整,可以使刮板4031对镜面的压力保持在一定范围内,增加作业过程中的安全性。
76.本技术提供的实施例之间的相似部分相互参见即可,以上提供的具体实施方式只是本技术总的构思下的几个示例,并不构成本技术保护范围的限定。对于本领域的技术人员而言,在不付出创造性劳动的前提下依据本技术方案所扩展出的任何其他实施方式都属于本技术的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1