一种港口用弹簧夹轨器的轨道清理机构的制作方法
1.本实用新型属于港口设备技术领域,具体涉及一种港口用弹簧夹轨器的轨道清理机构。
背景技术:
2.受风吹雨打所影响,轨道表面会生锈或粘结固态粉尘颗粒物,这样就导致弹簧夹轨器在经过时会与其发生摩擦从而出现刺耳的声音,同时长时间的摩擦也会导致弹簧夹轨器精准度降低,使其不能很好的发挥其作用,为了保证弹簧夹轨器的使用效果,需要人工对轨道表面进行清理,对于低处的轨道人工可进行清理,但是对于高处的轨道人工不便于操作的同时安全性能也低。
3.为解决上述问题,现有的弹簧夹轨器在本技术中提出一种港口用弹簧夹轨器的轨道清理机构。
技术实现要素:
4.为解决上述背景技术中提出的问题,本实用新型提供了一种港口用弹簧夹轨器的轨道清理机构,本实用新型设计新颖,结构合理,与传统人工操作相比,本装置设置了驱动机构、清扫机构与吹气机构,通过驱动机构、清扫机构与吹气机构相互配合可有效对高处轨道表面进行清理,同时本装置还设置了行走机构和电控机构,通过行走机构和电控机构相互配合可定时定距在轨道表面进行移动,整体操作简单且整体控制均通过控制器控制,数据精准,性能稳定,实用性强且使用效果好。
5.为实现上述目的,本实用新型提供如下技术方案:一种港口用弹簧夹轨器的轨道清理机构,包括轨道,还包括安装在所述轨道表面的清理装置;
6.所述清理装置包括有壳体、驱动机构、行走机构、吹气机构、清扫机构和电控机构,所述壳体滑动连接在轨道顶部,所述驱动机构固定连接在壳体内壁,所述行走机构与吹气机构均转动连接在壳体内壁并分别位于驱动机构左右两侧,所述驱动机构一端与行走机构一端相连接,另一端与吹气机构一端相连接,所述清扫机构转动连接在壳体内壁并位于吹气机构一侧,所述清扫机构一端与吹气机构一端相连接,所述电控机构螺栓紧固在壳体顶部并与驱动机构电性连接。
7.作为本实用新型一种港口用弹簧夹轨器的轨道清理机构优选的,所述驱动机构包括有双轴电机、第一齿轮、第二齿轮和第三齿轮,所述双轴电机螺栓紧固在壳体内壁,所述第一齿轮、第二齿轮和第三齿轮由内而外按顺序依次对称固定连接在双轴电机输出轴外表面,所述第三齿轮位于壳体外侧,所述双轴电机与外部电控机构电性连接。
8.作为本实用新型一种港口用弹簧夹轨器的轨道清理机构优选的,所述行走机构包括有第一传动齿轮、第一同步带和行走滚轮,所述行走滚轮对称转动连接在壳体内壁并位于双轴电机一侧,所述行走滚轮与轨道表面相贴合,所述第一传动齿轮转动连接在壳体外表面并与行走滚轮位置相对应,所述第一传动齿轮中心轴与行走滚轮中心轴固定连接,所
述第一传动齿轮通过第一同步带与第三齿轮相连接。
9.作为本实用新型一种港口用弹簧夹轨器的轨道清理机构优选的,所述吹气机构包括有第一传动轴、第四齿轮、第五齿轮、第六齿轮、第二同步带、第二传动轴、第七齿轮、第八齿轮、第九齿轮、第三同步带、传动齿轮和风扇,所述第一传动轴对称转动连接在壳体内壁并位于双轴电机一侧,所述第四齿轮、第五齿轮和第六齿轮由内而外按顺序依次固定连接在第一传动轴外表面,所述第六齿轮位于壳体外侧并与清扫机构一端相连接,所述第五齿轮通过第二同步带与第二齿轮相连接,所述第二传动轴转动连接在壳体内壁并位于双轴电机一侧,所述第七齿轮固定连接在第二传动轴表面中心处,所述第八齿轮对称固定连接在第二传动轴表面并位于第七齿轮外侧,所述第九齿轮对称固定连接在第二传动轴表面并位于第八齿轮外侧,所述第八齿轮通过第三同步带与第一齿轮相连接,所述第九齿轮与清扫机构一端相连接,所述传动齿轮转动连接在壳体内壁并分别与第四齿轮和第七齿轮位置相对应,所述传动齿轮分别与第四齿轮和第七齿轮啮合连接,所述风扇固定连接在传动齿轮远离第四齿轮和第七齿轮的一端外表面。
10.作为本实用新型一种港口用弹簧夹轨器的轨道清理机构优选的,所述清扫机构包括有第三传动轴、上毛刷筒、第十齿轮、第四同步带、第十一齿轮、第五同步带和侧毛刷筒,所述第三传动轴转动连接在壳体内壁并位于第二传动轴一侧,所述上毛刷筒固定连接在第三传动轴表面并与轨道顶部相接触,所述第十齿轮对称固定连接在第三传动轴表面并位于上毛刷筒两侧,所述第十齿轮通过第四同步带与第九齿轮相连接,所述第十一齿轮对称转动连接在壳体外表面并通过第五同步带与第六齿轮相连接,所述侧毛刷筒对称转动连接在壳体内壁并与第十一齿轮位置相对应,所述侧毛刷筒中心轴与第十一齿轮中心轴固定连接。
11.作为本实用新型一种港口用弹簧夹轨器的轨道清理机构优选的,所述电控机构包括有外壳、控制器、位置传感器和蓄电池,所述外壳螺栓紧固在壳体顶部,所述控制器螺栓紧固在外壳顶部,所述位置传感器卡接固定在外壳表面,所述蓄电池螺栓紧固在外壳内壁,所述蓄电池与控制器电连接,所述控制器分别与位置传感器和双轴电机电性连接。
12.作为本实用新型一种港口用弹簧夹轨器的轨道清理机构优选的,所述位置传感器包括有移动位置传感器和固定位置端,所述移动位置传感器卡接固定在外壳外表面,所述轨道起点处和终点处一侧均安装有固定位置端并与移动位置传感器位置相对应,当所述移动位置传感器表面与固定位置端表面相贴合时,所述移动位置传感器将发送电信号给控制器。
13.作为本实用新型一种港口用弹簧夹轨器的轨道清理机构优选的,所述驱动机构、行走机构、吹气机构和清扫机构均与壳体内部形状尺寸相适配。
14.与现有技术相比,本实用新型的有益效果是:本实用新型设计新颖,结构合理,与传统人工操作相比,本装置设置了驱动机构、清扫机构与吹气机构,通过驱动机构、清扫机构与吹气机构相互配合可有效对高处轨道表面进行清理,同时本装置还设置了行走机构和电控机构,通过行走机构和电控机构相互配合可定时定距在轨道表面进行移动,可有效代替人工清理,整体操作简单且整体控制均通过控制器控制,数据精准,性能稳定,实用性强且使用效果好。
附图说明
15.附图用来提供对本实用新型的进一步理解,并且构成说明书的一部分,与本实用新型的实施例一起用于解释本实用新型,并不构成对本实用新型的限制。在附图中:
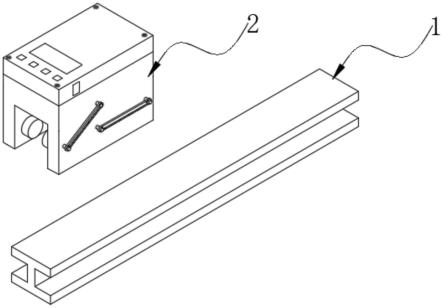
16.图1为本实用新型结构示意图;
17.图2为本实用新型中的壳体结构示意图;
18.图3为本实用新型中的清扫机构结构示意图;
19.图4为本实用新型中的驱动机构结构示意图;
20.图5为本实用新型中的行走机构结构示意图;
21.图6为本实用新型中的吹气机构结构示意图;
22.图7为本实用新型中的电控机构结构示意图。
23.图中:
24.1、轨道;
25.2、清理装置;21、壳体;
26.22、驱动机构;221、双轴电机;222、第一齿轮;223、第二齿轮;224、第三齿轮;
27.23、行走机构;231、第一传动齿轮;232、第一同步带;233、行走滚轮;
28.24、吹气机构;241、第一传动轴;242、第四齿轮;243、第五齿轮;244、第六齿轮;245、第二同步带;246、第二传动轴;247、第七齿轮;248、第八齿轮;249、第九齿轮;2410、第三同步带;2411、传动齿轮;2412、风扇;
29.25、清扫机构;251、第三传动轴;252、上毛刷筒;253、第十齿轮;254、第四同步带;255、第十一齿轮;256、第五同步带;257、侧毛刷筒;
30.26、电控机构;261、外壳;262、控制器;263、位置传感器;2631、移动位置传感器;264、蓄电池。
具体实施方式
31.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
32.实施例1
33.请参阅图1-图7;
34.一种港口用弹簧夹轨器的轨道清理机构,包括轨道1,还包括安装在轨道1表面的清理装置2;
35.清理装置2包括有壳体21、驱动机构22、行走机构23、吹气机构24、清扫机构25和电控机构26,壳体21滑动连接在轨道1顶部,驱动机构22固定连接在壳体21内壁,行走机构23与吹气机构24均转动连接在壳体21内壁并分别位于驱动机构22左右两侧,驱动机构22一端与行走机构23一端相连接,另一端与吹气机构24一端相连接,清扫机构25转动连接在壳体21内壁并位于吹气机构24一侧,清扫机构25一端与吹气机构24一端相连接,电控机构26螺栓紧固在壳体21顶部并与驱动机构22电性连接。
36.本实施方案中:使用时,通过遥控设备控制控制器262通电运行,控制器262通电运
行按照设定程序控制双轴电机221开启,双轴电机221通电旋转带动第一齿轮222、第二齿轮223和第三齿轮224同步进行旋转,第一齿轮222旋转通过第三同步带2410同步带动第八齿轮248旋转,第八齿轮248旋转同步带动第二传动轴246旋转,第二传动轴246旋转同步带动第七齿轮247和第九齿轮249旋转,第九齿轮249旋转通过第四同步带254同步带动第十齿轮253旋转,第十齿轮253旋转同步带动第三传动轴251旋转,第三传动轴251旋转同步带动上毛刷筒252旋转对轨道1顶部进行清理操作,第七齿轮247旋转同步带动顶部的传动齿轮2411旋转,传动齿轮2411旋转同步带动顶部的风扇2412旋转从而产生风力吹除清扫后的灰尘颗粒,与此同时,第二齿轮223旋转通过第二同步带245同步带动第五齿轮243旋转,第五齿轮243旋转同步带动第一传动轴241旋转,第一传动轴241旋转带动第四齿轮242和第六齿轮244同步旋转,第六齿轮244旋转通过第五同步带256同步带动第十一齿轮255旋转,第十一齿轮255旋转同步带动侧毛刷筒257旋转对轨道1侧部进行清理操作,第四齿轮242旋转同步带动侧部的传动齿轮2411旋转,传动齿轮2411旋转同步带动侧部的风扇2412旋转从而产生风力吹除清扫后的灰尘颗粒,与此同时,第三齿轮224旋转通过第一同步带232同步带动第一传动齿轮231旋转,第一传动齿轮231旋转同步带动行走滚轮233在轨道1表面旋转从而推动装置向前或向后移动,当移动位置传感器2631移动到终点处的固定位置端位置并与固定位置端相贴合时,移动位置传感器2631将发送电信号给控制器262,控制器262会根据电信号数据信息得知本装置移动到设定位置,从而控制双轴电机221反转实现装置复位,当移动位置传感器2631到达起点处的固定位置端位置并与固定位置端相贴合时,移动位置传感器2631将发送电信号给控制器262,控制器262会根据电信号数据信息得知本装置已移动到设定位置并完成复位操作,从而控制双轴电机221停止运行,整体操作简单,实用性强且使用效果好。
37.进一步而言:
38.在一个可选的实施例中:驱动机构22包括有双轴电机221、第一齿轮222、第二齿轮223和第三齿轮224,双轴电机221螺栓紧固在壳体21内壁,第一齿轮222、第二齿轮223和第三齿轮224由内而外按顺序依次对称固定连接在双轴电机221输出轴外表面,第三齿轮224位于壳体21外侧,双轴电机221与外部电控机构26电性连接。
39.需要说明的是,本实施例中:进一步对驱动机构22的结构和连接关系进行讲解,使用时,双轴电机221通电旋转从而带动第一齿轮222、第二齿轮223和第三齿轮224同步旋转,通过第一齿轮222、第二齿轮223和第三齿轮224旋转可联动行走机构23、吹气机构24和清扫机构25同步运行,整体操作简单,实用性强且使用效果好。
40.更进一步而言:
41.在一个可选的实施例中:行走机构23包括有第一传动齿轮231、第一同步带232和行走滚轮233,行走滚轮233对称转动连接在壳体21内壁并位于双轴电机221一侧,行走滚轮233与轨道1表面相贴合,第一传动齿轮231转动连接在壳体21外表面并与行走滚轮233位置相对应,第一传动齿轮231中心轴与行走滚轮233中心轴固定连接,第一传动齿轮231通过第一同步带232与第三齿轮224相连接。
42.需要说明的是,本实施例中:进一步对行走机构23的结构和连接关系进行讲解,使用时,第三齿轮224旋转通过第一同步带232同步带动第一传动齿轮231旋转,第一传动齿轮231旋转同步带动行走滚轮233在轨道1表面旋转从而推动装置向前或向后移动,整体操作
简单,实用性强且使用效果好。
43.更进一步而言:
44.在一个可选的实施例中:吹气机构24包括有第一传动轴241、第四齿轮242、第五齿轮243、第六齿轮244、第二同步带245、第二传动轴246、第七齿轮247、第八齿轮248、第九齿轮249、第三同步带2410、传动齿轮2411和风扇2412,第一传动轴241对称转动连接在壳体21内壁并位于双轴电机221一侧,第四齿轮242、第五齿轮243和第六齿轮244由内而外按顺序依次固定连接在第一传动轴241外表面,第六齿轮244位于壳体21外侧并与清扫机构25一端相连接,第五齿轮243通过第二同步带245与第二齿轮223相连接,第二传动轴246转动连接在壳体21内壁并位于双轴电机221一侧,第七齿轮247固定连接在第二传动轴246表面中心处,第八齿轮248对称固定连接在第二传动轴246表面并位于第七齿轮247外侧,第九齿轮249对称固定连接在第二传动轴246表面并位于第八齿轮248外侧,第八齿轮248通过第三同步带2410与第一齿轮222相连接,第九齿轮249与清扫机构25一端相连接,传动齿轮2411转动连接在壳体21内壁并分别与第四齿轮242和第七齿轮247位置相对应,传动齿轮2411分别与第四齿轮242和第七齿轮247啮合连接,风扇2412固定连接在传动齿轮2411远离第四齿轮242和第七齿轮247的一端外表面。
45.需要说明的是,本实施例中:进一步对吹气机构24的结构和连接关系进行讲解,使用时,第一齿轮222旋转通过第三同步带2410同步带动第八齿轮248旋转,第八齿轮248旋转同步带动第二传动轴246旋转,第二传动轴246旋转同步带动第七齿轮247和第九齿轮249旋转,第九齿轮249旋转通过第四同步带254同步带动第十齿轮253旋转,第十齿轮253旋转同步带动第三传动轴251旋转,第三传动轴251旋转同步带动上毛刷筒252旋转对轨道1顶部进行清理操作,第七齿轮247旋转同步带动顶部的传动齿轮2411旋转,传动齿轮2411旋转同步带动顶部的风扇2412旋转从而产生风力吹除清扫后的灰尘颗粒,与此同时,第二齿轮223旋转通过第二同步带245同步带动第五齿轮243旋转,第五齿轮243旋转同步带动第一传动轴241旋转,第一传动轴241旋转带动第四齿轮242和第六齿轮244同步旋转,第六齿轮244旋转通过第五同步带256同步带动第十一齿轮255旋转,第十一齿轮255旋转同步带动侧毛刷筒257旋转对轨道1侧部进行清理操作,第四齿轮242旋转同步带动侧部的传动齿轮2411旋转,传动齿轮2411旋转同步带动侧部的风扇2412旋转从而产生风力吹除清扫后的灰尘颗粒,整体操作简单,实用性强且使用效果好。
46.更进一步而言:
47.在一个可选的实施例中:清扫机构25包括有第三传动轴251、上毛刷筒252、第十齿轮253、第四同步带254、第十一齿轮255、第五同步带256和侧毛刷筒257,第三传动轴251转动连接在壳体21内壁并位于第二传动轴246一侧,上毛刷筒252固定连接在第三传动轴251表面并与轨道1顶部相接触,第十齿轮253对称固定连接在第三传动轴251表面并位于上毛刷筒252两侧,第十齿轮253通过第四同步带254与第九齿轮249相连接,第十一齿轮255对称转动连接在壳体21外表面并通过第五同步带256与第六齿轮244相连接,侧毛刷筒257对称转动连接在壳体21内壁并与第十一齿轮255位置相对应,侧毛刷筒257中心轴与第十一齿轮255中心轴固定连接。
48.需要说明的是,本实施例中:进一步对清扫机构25的结构和连接关系进行讲解,使用时,第二传动轴246旋转同步带动第九齿轮249旋转,第九齿轮249旋转通过第四同步带
254同步带动第十齿轮253旋转,第十齿轮253旋转同步带动第三传动轴251旋转,第三传动轴251旋转同步带动上毛刷筒252旋转对轨道1顶部进行清理操作,与此同时,第六齿轮244旋转通过第五同步带256同步带动第十一齿轮255旋转,第十一齿轮255旋转同步带动侧毛刷筒257旋转对轨道1侧部进行清理操作,整体操作简单,实用性强且使用效果好。
49.更进一步而言:
50.在一个可选的实施例中:电控机构26包括有外壳261、控制器262、位置传感器263和蓄电池264,外壳261螺栓紧固在壳体21顶部,控制器262螺栓紧固在外壳261顶部,位置传感器263卡接固定在外壳261表面,蓄电池264螺栓紧固在外壳261内壁,蓄电池264与控制器262电连接,控制器262分别与位置传感器263和双轴电机221电性连接。
51.需要说明的是,本实施例中:外壳261表面设置有充电线路(图中未示出),充电线路一端与蓄电池264相连接。
52.需要说明的是,本实施例中:控制器262内置有定时器和无线通讯模块,通过无线通讯模块可与外部遥控装置相连接从而控制本装置。
53.需要说明的是,本实施例中:进一步对电控机构26的结构和连接关系进行讲解,使用时,通过蓄电池264给控制器262供电,然后在通过控制器262分别控制位置传感器263和双轴电机221运行,整体通过控制器262控制,数据精准,性能稳定,使用效果好。
54.更进一步而言:
55.在一个可选的实施例中:位置传感器263包括有移动位置传感器2631和固定位置端,移动位置传感器2631卡接固定在外壳261外表面,轨道1起点处和终点处一侧均安装有固定位置端并与移动位置传感器2631位置相对应,当移动位置传感器2631表面与固定位置端表面相贴合时,移动位置传感器2631将发送电信号给控制器262。
56.需要说明的是,本实施例中:进一步对位置传感器263的结构和连接关系进行讲解,在轨道1起点处和终点处一侧设置固定位置端,在外壳261外表面设置移动位置传感器2631,当移动位置传感器2631移动到终点处的固定位置端位置并与固定位置端相贴合时,移动位置传感器2631将发送电信号给控制器262,控制器262会根据电信号数据信息得知本装置移动到设定位置,从而控制双轴电机221反转实现装置复位,当移动位置传感器2631到达起点处的固定位置端位置并与固定位置端相贴合时,移动位置传感器2631将发送电信号给控制器262,控制器262会根据电信号数据信息得知本装置已移动到设定位置并完成复位操作,从而控制双轴电机221停止运行,整体操作简单,实用性强且使用效果好。
57.更进一步而言:
58.在一个可选的实施例中:驱动机构22、行走机构23、吹气机构24和清扫机构25均与壳体21内部形状尺寸相适配。
59.需要说明的是,本实施例中:第一齿轮222、第二齿轮223、第三齿轮224、第一传动齿轮231、第四齿轮242、第五齿轮243、第六齿轮244、第七齿轮247、第八齿轮248、第九齿轮249、传动齿轮2411、第十齿轮253和第十一齿轮255尺寸均不相同并按一定比例设置,通过设置不同的尺寸比例从而起到转速调节的作用,整体操作简单,实用性强且使用效果好。
60.需要说明的是,本实施例中:驱动机构22、行走机构23、吹气机构24和清扫机构25均与壳体21内部形状尺寸相适配便于安装的驱动机构22、行走机构23、吹气机构24和清扫机构25的同时还提高其结构稳定性,确保清理效果,整体操作简单,实用性强且使用效果
好。
61.最后应说明的是:以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1