一种机器人零部件除尘装置
1.本实用新型属于除尘装置技术领域,具体为一种机器人零部件除尘装置。
背景技术:
2.机器人(robot)是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务,机器人由多个零件组成,在组装机器人过程中需要对机器人零件进行除尘操作。
3.如公布号cn209647061u的一种机器人除尘装置,此除尘装置通过毛刷和手动擦拭进行除尘,但是这种除尘方式无法对机器人零件进行静电消除,当机器人零件带有静电时,在组装完毕后容易造成短路的情况,为了解决上述问题故提出一种机器人零部件除尘装置。
技术实现要素:
4.本实用新型的目的在于:为了对机器人零件进行除尘的同时消除机器人零件携带的静电。
5.本实用新型采用的技术方案如下:一种机器人零部件除尘装置,包括除尘台,所述除尘台前侧固定安装有固定架,所述固定架中部旋转连接有隔板,所述固定架中部下端固定安装有承托板,所述隔板背部固定安装有电机,所述电机端部固定安装有布风罩,所述电机的输出轴端部固定安装有静电消除棒,所述静电消除棒外壁设置有多个出风口。
6.通过上述技术方案,将所需除尘的机器人零部件放入承托板上表面,旋转隔板,使布风罩面向机器人零部件,通过电机带动静电消除棒型号为gca离子铜棒高速旋出产生风力吹向机器人零部件消除机器人零部件外壁的灰尘,同时静电消除棒自身产生大量带正电荷的气团,正电荷气团通过出风口吹出经过机器人零部件外壁,正电荷中和机器人零部件外壁的电荷从消除机器人零部件外部的静电。
7.在一优选的实施方式中,所述除尘台内部固定安装有导流块,所述导流块靠近固定架一侧中部下端开设有进水口,所述导流块底部开设有出水口。
8.通过上述技术方案,灰尘被吹向导流块,灰尘与导流块外壁的水混合后进入进水口中,再通过出水口进入除尘台内底部,防止灰尘飘散。
9.在一优选的实施方式中,所述导流块靠近固定架一侧为弧面结构。
10.在一优选的实施方式中,所述除尘台顶部固定安装有上箱体,所述上箱体内部固定安装有水泵,所述水泵的输出端固定安装有出水管,所述出水管位于导流块正上方。
11.通过上述技术方案,水泵对出水管供水,出水管中的水流向导流块。
12.在一优选的实施方式中,所述除尘台后侧下端外壁固定安装有循环管,所述循环管远离除尘台一侧与水泵的输入端固定连接。
13.通过上述技术方案,进入除尘台内底部的混合液经过循环管被水泵抽取用于循环除尘。
14.在一优选的实施方式中,所述承托板外壁设置有多个圆形小孔。
15.在一优选的实施方式中,所述隔板采用透明亚克力。
16.通过上述技术方案,通过隔板可以观察零部件除尘时的状态。
17.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:本实用新型提出一种机器人零部件除尘装置,为了对机器人零件进行除尘的同时消除机器人零件携带的静电。
18.1、本实用新型中,通过电机带动静电消除棒型号为gca离子铜棒高速旋出产生风力吹向机器人零部件消除机器人零部件外壁的灰尘,同时静电消除棒自身产生大量带正电荷的气团,正电荷气团通过出风口吹出经过机器人零部件外壁,正电荷中和机器人零部件外壁的电荷从消除机器人零部件外部的静电。
19.2、本实用新型中,灰尘被吹向导流块,灰尘与导流块外壁的水混合后进入进水口中,再通过出水口进入除尘台内底部,防止灰尘飘散。
附图说明
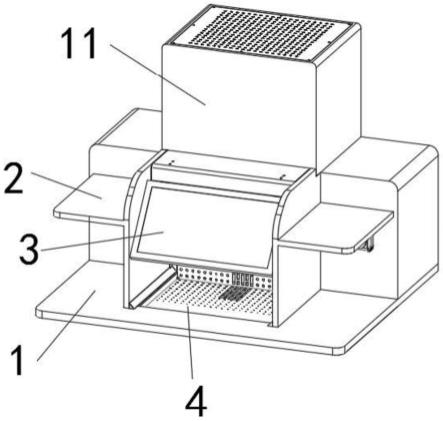
20.图1为本实用新型结构示意图;
21.图2为本实用中隔板的侧视图;
22.图3为本实用中电机和布风罩的主视图;
23.图4为本实用中除尘台的内部结构示意图;
24.图5为本实用中导流块的结构示意图。
25.图中标记:1-除尘台;2-固定架;3-隔板;4-承托板;5-电机;6-布风罩;7-静电消除棒;8-出风口;9-导流块;10-出水口;11-上箱体;12-水泵;13-出水管;14-循环管;15-进水口。
26.需要说明的是:
27.静电消除棒型号为gc501a离子铜棒。
具体实施方式
28.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
29.下面将结合图1-图5对本实用新型实施例的一种机器人零部件除尘装置进行详细的说明。
30.实施例:
31.参考图1所示,一种机器人零部件除尘装置,包括除尘台1,除尘台1前侧固定安装有固定架2,固定架2中部旋转连接有隔板3,隔板3采用透明亚克力,通过隔板3可以观察零部件除尘时的状态,固定架2中部下端固定安装有承托板4,承托板4外壁设置有多个圆形小孔;
32.参考图2和图3所示,隔板3背部固定安装有电机5,电机5端部固定安装有布风罩6,
电机5的输出轴端部固定安装有静电消除棒7,静电消除棒7外壁设置有多个出风口8,旋转隔板3,使布风罩6面向机器人零部件,通过电机5带动静电消除棒7型号为gc501a离子铜棒高速旋出产生风力吹向机器人零部件消除机器人零部件外壁的灰尘,同时静电消除棒7自身产生大量带正电荷的气团,正电荷气团通过出风口8吹出经过机器人零部件外壁,正电荷中和机器人零部件外壁的电荷从消除机器人零部件外部的静电;
33.参考图4和图5所示,除尘台1内部固定安装有导流块9,导流块9靠近固定架2一侧为弧面结构,导流块9靠近固定架2一侧中部下端开设有进水口15,导流块9底部开设有出水口10,除尘台1顶部固定安装有上箱体11,上箱体11内部固定安装有水泵12,水泵12的输出端固定安装有出水管13,出水管13位于导流块9正上方,灰尘被吹向导流块9,灰尘与导流块9外壁的水混合后进入进水口15中,再通过出水口10进入除尘台1内底部,防止灰尘飘散,除尘台1后侧下端外壁固定安装有循环管14,循环管14远离除尘台1一侧与水泵12的输入端固定连接,进入除尘台1内底部的混合液经过循环管14被水泵12抽取用于循环除尘。
34.工作原理:将所需除尘的机器人零部件放入承托板4上表面,旋转隔板3,使布风罩6面向机器人零部件,通过电机5带动静电消除棒7型号为gc501a离子铜棒高速旋出产生风力吹向机器人零部件消除机器人零部件外壁的灰尘,同时静电消除棒7自身产生大量带正电荷的气团,正电荷气团通过出风口8吹出经过机器人零部件外壁,正电荷中和机器人零部件外壁的电荷从消除机器人零部件外部的静电,灰尘被吹向导流块9,灰尘与导流块9外壁的水混合后进入进水口15中,再通过出水口10进入除尘台1内底部,防止灰尘飘散。
35.以上实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1