一种隔离开关触头除污装置的制作方法
本技术涉及一种除污装置,具体的说是涉及一种隔离开关触头除污装置,属于电力检修作业领域。
背景技术:
1、隔离开关主要用来将高压配电装置中需要停电的部分与带电部分可靠地隔离,以保证检修工作的安全。其一般用作高压隔离开关(即额定电压在1kv以上的隔离开关)使用在发电厂和变电站电气系统中,是发电厂和变电站电气系统中重要的开关电器,其主要功能是保证高压电器及装置在检修工作时的安全,起隔离电压的作用。而发电厂和变电站多坐落于高污秽等级地区,常年受风沙雨雪侵蚀且部分设备长期处于备用状态,高压隔离开关的触头又全部都是敞露在空气中,这样势必会造成高压隔离开关的触头触指接触面产生锈蚀和污秽等问题,进而造成触头触指接触电阻增大,使其触头触指的接触部分产生发热缺陷,从而影响电网的安全稳定运行。
技术实现思路
1、本实用新型的目的在于提供一种隔离开关触头除污装置,用于解决背景技术中存在的因高压隔离开关的触头触指接触面产生锈蚀和污秽问题,导致的触头触指接触电阻增大,使其触头触指的接触部分产生发热缺陷的问题。
2、为实现上述目的,本实用新型采取的技术方案如下:
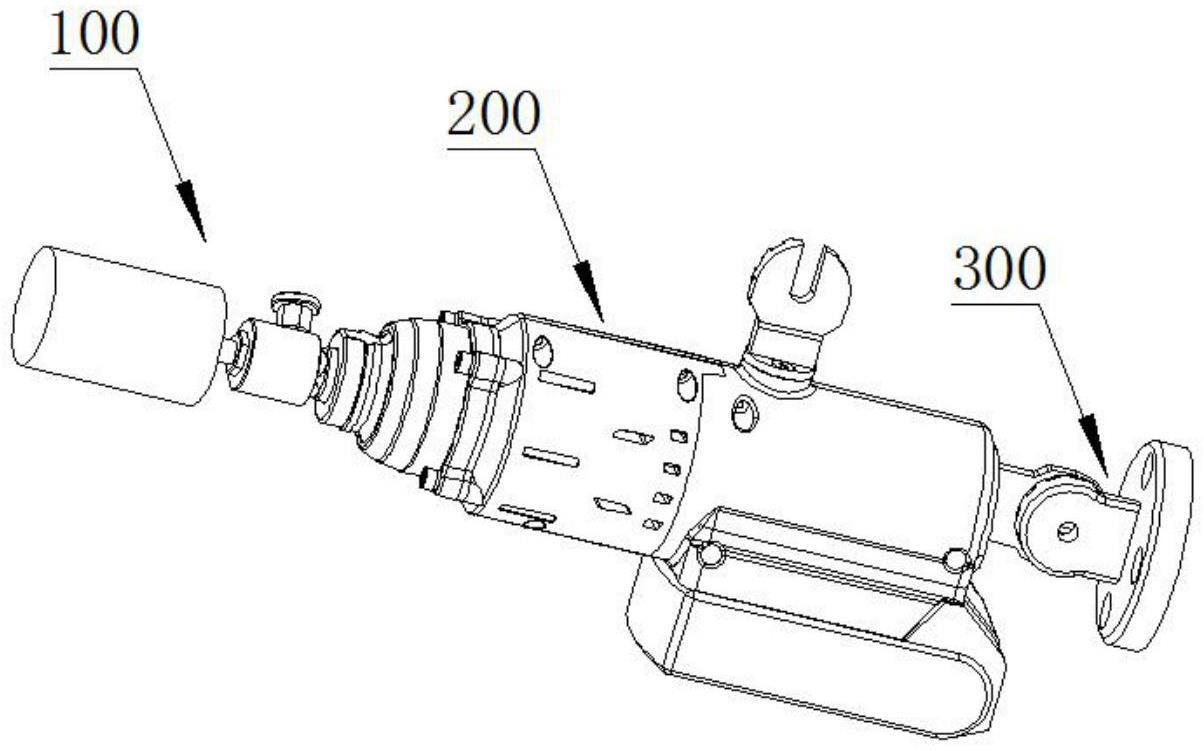
3、一种隔离开关触头除污装置,包含快拆式清扫刷、无线遥控电机、连接法兰及无线遥控器,所述快拆式清扫刷可拆卸式安装在所述无线遥控电机的头部,所述连接法兰可拆卸式安装在所述无线遥控电机的尾部,所述无线遥控器与所述无线遥控电机通信连接,使用时,所述隔离开关触头除污装置通过连接法兰安装在带电作业机器人的机械臂端部,在带电作业机器人及无线遥控器的控制下完成对隔离开关触头的除污操作。
4、进一步,所述快拆式清扫刷包含清扫刷、磁吸螺母、连接套、快插螺母及快速插销,所述磁吸螺母螺纹套设在所述清扫刷靠近无线遥控电机的一端,所述连接套一端套设在所述磁吸螺母上,另一端套设在所述无线遥控电机的头部上,所述快插螺母插设在所述连接套靠近所述无线遥控电机的一端上,所述快速插销依次穿过所述快插螺母及连接套,并插设在所述无线遥控电机的头部上。
5、进一步,所述清扫刷包含圆柱形刷柄和圆柱形刷头,所述圆柱形刷头套设在所述圆柱形刷柄的头部,所述圆柱形刷柄的尾部穿过所述磁吸螺母、并通过磁吸螺母磁吸抵接在所述无线遥控电机的头部。
6、进一步,所述圆柱形刷头采用硅胶或纯棉百洁布制成。
7、进一步,所述无线遥控电机包含外壳、减速机、直流无刷电机、直流无刷电机电路板、遥控电路板、电源开关、电池、电池保护壳、第一梅花头公头及第二梅花头公头,所述减速机一端穿设在所述外壳内部,并与所述直流无刷电机相连,另一端穿设在所述外壳外部,并与所述快拆式清扫刷相连,所述直流无刷电机、直流无刷电机电路板及遥控电路板均安装在所述外壳内部,所述电源开关嵌设在所述外壳的外壁上,并与所述直流无刷电机电路板电连接,所述直流无刷电机电路板分别与所述直流无刷电机、遥控电路板及电池电连接,所述遥控电路板与带电作业机器人通信连接,所述电池安装在所述电池保护壳内部,所述电池保护壳安装在所述外壳的底部,所述第一梅花头公头安装在所述外壳的顶部,所述第二梅花头公头安装在所述外壳的尾部,并与所述连接法兰相连。
8、进一步,所述连接法兰包含梅花头母头及机械臂法兰,所述梅花头母头安装在所述机械臂法兰上,并与所述第二梅花头公头相适配,所述机械臂法兰安装在带电作业机器人的机械臂上。
9、与现有技术相比,本实用新型的优点是:可快速安装在现有带电作业机器人的机械臂端部,并在现有带电作业机器人的控制下,实现快速高效的去除高压隔离开关的触头触指接触面处产生的锈蚀和污秽,不仅可以有效避免了高压隔离开关的触头触指表面因锈蚀和污秽问题所导致的接触电阻增大而引发的发热问题,还可以大幅度降低高压隔离开关触头除污作业人员的劳动强度,提升除污作业的便捷性,降低变电站内的作业风险,保证作业人员的安全。
技术特征:
1.一种隔离开关触头除污装置,其特征在于:包含快拆式清扫刷(100)、无线遥控电机(200)、连接法兰(300)及无线遥控器,所述快拆式清扫刷(100)可拆卸式安装在所述无线遥控电机(200)的头部,所述连接法兰(300)可拆卸式安装在所述无线遥控电机(200)的尾部,所述无线遥控器与所述无线遥控电机(200)通信连接,使用时,所述隔离开关触头除污装置通过连接法兰(300)安装在带电作业机器人的机械臂端部,在带电作业机器人的控制下实现对隔离开关触头的除污操作。
2.根据权利要求1所述的隔离开关触头除污装置,其特征在于:所述快拆式清扫刷(100)包含清扫刷(101)、磁吸螺母(102)、连接套(103)、快插螺母(104)及快速插销(105),所述磁吸螺母(102)螺纹套设在所述清扫刷(101)靠近无线遥控电机(200)的一端,所述连接套(103)一端套设在所述磁吸螺母(102)上,另一端套设在所述无线遥控电机(200)的头部上,所述快插螺母(104)插设在所述连接套(103)靠近所述无线遥控电机(200)的一端上,所述快速插销(105)依次穿过所述快插螺母(104)及连接套(103),并插设在所述无线遥控电机(200)的头部上。
3.根据权利要求2所述的隔离开关触头除污装置,其特征在于:所述清扫刷(101)包含圆柱形刷柄(101a)和圆柱形刷头(101b),所述圆柱形刷头(101b)套设在所述圆柱形刷柄(101a)的头部,所述圆柱形刷柄(101a)的尾部穿过所述磁吸螺母(102)、并通过磁吸螺母(102)磁吸抵接在所述无线遥控电机(200)的头部。
4.根据权利要求3所述的隔离开关触头除污装置,其特征在于:所述圆柱形刷头(101b)采用硅胶或纯棉百洁布制成。
5.根据权利要求2所述的隔离开关触头除污装置,其特征在于:所述无线遥控电机(200)包含外壳(201)、减速机(202)、直流无刷电机(203)、直流无刷电机电路板(204)、遥控电路板(205)、电源开关(206)、电池、电池保护壳(207)、第一梅花头公头(208)及第二梅花头公头(209),所述减速机(202)一端穿设在所述外壳(201)内部,并与所述直流无刷电机(203)相连,另一端穿设在所述外壳(201)外部,并与所述快拆式清扫刷(100)相连,所述直流无刷电机(203)、直流无刷电机电路板(204)及遥控电路板(205)均安装在所述外壳(201)内部,所述电源开关(206)嵌设在所述外壳(201)的外壁上,并与所述直流无刷电机电路板(204)电连接,所述直流无刷电机电路板(204)分别与所述直流无刷电机(203)、遥控电路板(205)及电池电连接,所述遥控电路板(205)与带电作业机器人通信连接,所述电池安装在所述电池保护壳(207)内部,所述电池保护壳(207)安装在所述外壳(201)的底部,所述第一梅花头公头(208)安装在所述外壳(201)的顶部,所述第二梅花头公头(209)安装在所述外壳(201)的尾部,并与所述连接法兰(300)相连。
6.根据权利要求5所述的隔离开关触头除污装置,其特征在于:所述连接法兰(300)包含梅花头母头(301)及机械臂法兰(302),所述梅花头母头(301)安装在所述机械臂法兰(302)上,并与所述第二梅花头公头(209)相适配,所述机械臂法兰(302)安装在带电作业机器人的机械臂上。
技术总结
本技术公开了一种隔离开关触头除污装置,包含快拆式清扫刷、无线遥控电机及连接法兰,所述快拆式清扫刷可拆卸式安装在所述无线遥控电机的头部,所述连接法兰可拆卸式安装在所述无线遥控电机的尾部,使用时,本装置安装在带电作业机器人的机械臂端部,在带电作业机器人的控制下实现对隔离开关触头的除污操作。本技术优点有:可快速安装在带电作业机器人的机械臂端部,并在带电作业机器人的控制下,可实现快速高效的去除高压隔离开关的触头触指接触面处产生的锈蚀和污秽,不仅能大幅度降低作业人员的劳动强度,还能提升作业的便捷性,同时还降低了变电站内的作业风险,保证了作业人员的安全。
技术研发人员:邵航军,陈文通,常建斌,李策策,戴宇,吴雪峰,卢俊锋,林峰,黄晓峰,宋洪刚,王翊之,郑晓东,张佳铭,王文斌,郑聪
受保护的技术使用者:东阳市光明电力建设有限公司
技术研发日:20221207
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!