去除透明基材表面油墨的方法、系统、设备和存储介质与流程
本发明涉及激光,尤其涉及去除透明基材表面油墨的方法、系统、设备和存储介质。
背景技术:
1、在玻璃加工行业,在丝印工艺之后,玻璃上会沾上多余的油墨,因此在镀膜工艺之前,需要对玻璃上多余的油墨进行擦除。激光可以快速将玻璃表面的油墨清除。
2、当玻璃为平面玻璃时,油墨的清除较为简单,当玻璃为曲面玻璃时,由于振镜的焦距变化限制,通常无法很好的适应曲率变化导致的凹陷或凸起的玻璃表面,导致油墨的清理效果不理想
技术实现思路
1、基于此,有必要针对上述问题,提出了去除透明基材表面油墨的方法、系统、设备和存储介质,能够有效提升曲面透明基材的油墨清除效果。
2、一种去除透明基材表面油墨的方法,应用于油墨去除设备,所述油墨去除设备包括:
3、激光源,用于提供激光,所述激光用于去除曲面透明基材表面的油墨;
4、振镜,用于将所述激光射至所述曲面透明基材表面,以清除所述油墨,所述振镜的扫描位置固定,射出的激光具有固定的照射范围,且具有已知的焦距变化范围;
5、多轴机器人,用于带动所述曲面透明基材在三维方向上运动;
6、所述去除曲面透明基材表面油墨的方法包括如下步骤:
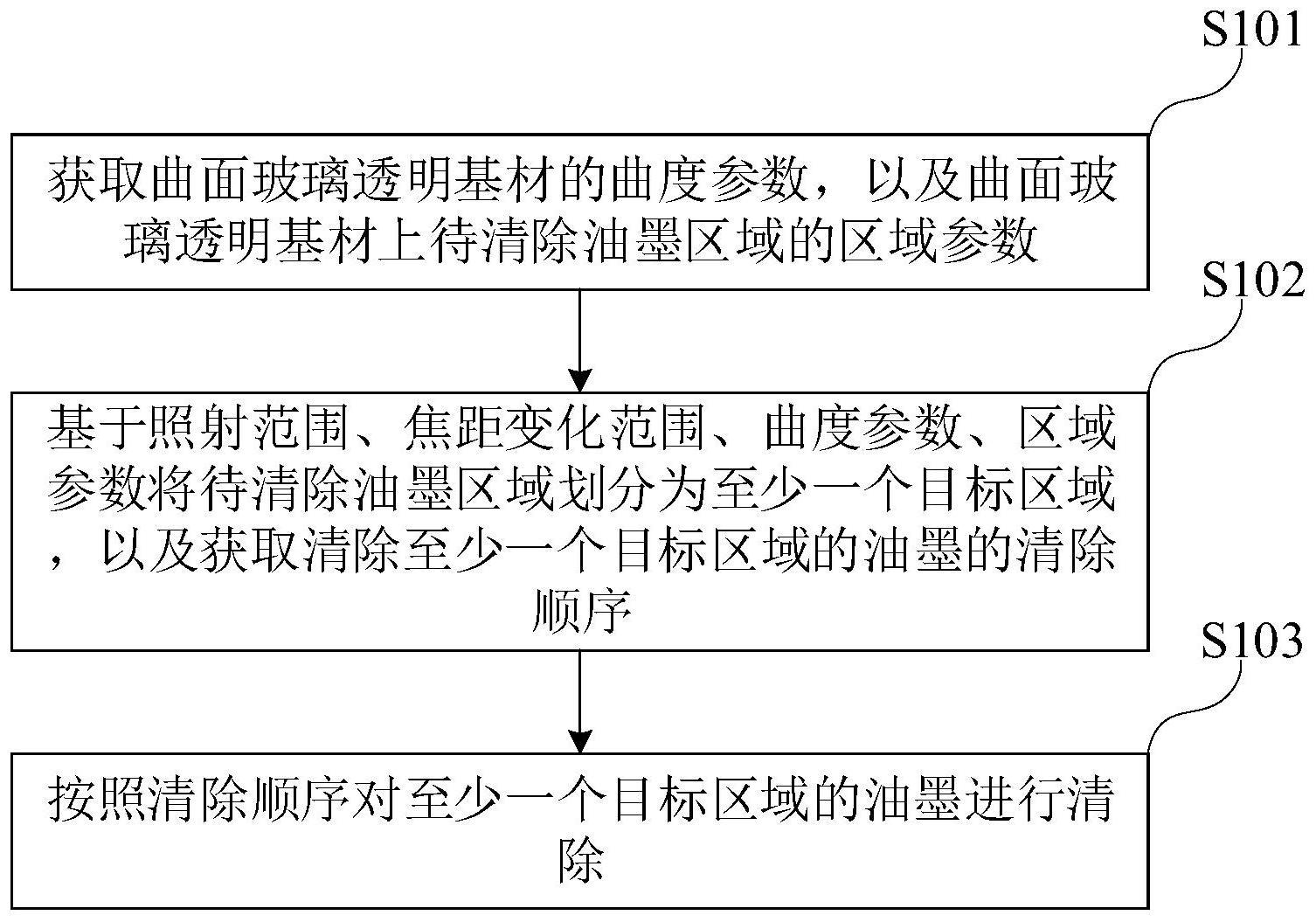
7、获取所述曲面透明基材的曲度参数,以及所述曲面透明基材上待清除油墨区域的区域参数;
8、基于所述照射范围、所述焦距变化范围、所述曲度参数、所述区域参数将所述待清除油墨区域划分为至少一个目标区域,以及获取清除所述至少一个目标区域的油墨的清除顺序;
9、按照所述清除顺序对所述至少一个目标区域的油墨进行清除。
10、其中,所述基于所述照射范围、所述焦距变化范围、所述曲度参数、所述区域参数将所述待清除油墨区域划分为至少一个目标区域的步骤,包括:
11、获取每个所述目标区域在被清除油墨时的清理位置和清理角度,以使得每个所述目标区域在被清除油墨时其最高点和最低点均位于所述焦距变化范围内。
12、其中,所述按照所述清除顺序对所述至少一个目标区域的油墨进行清除的步骤,包括:
13、获取多轴机器人中用于固定所述曲面透明基材的治具的外形参数;
14、基于所述曲度参数、所述外形参数和所述区域参数,获取所述激光射至所述所述曲面透明基材的下表面后的反射光路线,基于所述反射光路线设置在每个所述目标区域被清除油墨时所述曲面透明基材的三维位置数据,以使得所述反射光路线不会经过所述待清除油墨区域以外的其他区域。
15、其中,所述基于所述照射范围、所述焦距变化范围、所述曲度参数、所述区域参数将所述待清除油墨区域划分为至少一个目标区域的步骤,包括:
16、根据预设运动规则、预设焦距变化规则、预设目标区域数据量范围、预设加工效率规则中的至少一个将所述待清除油墨区域划分为至少一个目标区域。
17、其中,所述基于所述照射范围、所述焦距变化范围、所述曲度参数、所述区域参数将所述待清除油墨区域划分为至少一个目标区域的步骤,包括:
18、获取预设划分模板,根据所述预设划分模板将所述待清除油墨区域划分为至少一个初始区域;
19、针对每一个所述初始区域,判断所述初始区域中的加工点根据预设规划是否属于所述初始区域;
20、若所述加工点根据预设划分规则不属于所述初始区域,则从所述加工点的邻近的其他初始区域中找出与所述加工点匹配的匹配区域,将所述加工点调整划分至所述匹配区域;
21、基于调整后的初始区域获取所述至少一个目标区域。
22、其中,所述判断所述初始区域中的加工点根据预设规划是否属于所述初始区域的步骤之后,包括:
23、若所述加工点没有匹配的匹配区域,则将所述加工点作为独立的初始区域;或
24、在所有初始区域均执行完上述步骤之后,判断所述加工点是否能够匹配到调整划分后的所述初始区域中,若所述加工点不能匹配到调整划分后的所述初始区域,则将所述加工点作为独立的目标区域。
25、其中,所述油墨去除设备还包括:
26、吸光材料层,位于所述多轴机器人与所述曲面透明基材之间,用于吸收射出所述曲面透明基材的所述激光。
27、一种去除透明基材表面油墨的系统,应用于油墨去除设备,所述油墨去除设备包括:
28、激光源,用于提供激光,所述激光用于去除曲面透明基材表面的油墨;
29、振镜,用于将所述激光设置所述曲面透明基材表面,以清除所述油墨,所述振镜的扫描位置固定,射出的激光具有固定的照射范围,且具有已知的焦距变化范围;
30、多轴机器人,用于带动所述曲面透明基材在三维方向上运动;
31、所述去除曲面透明基材表面油墨的系统包括如下模块:
32、参数模块,用于获取所述曲面透明基材的曲度参数,以及所述曲面透明基材上待清除油墨区域的区域参数;
33、划分模块,用于基于所述照射范围、所述焦距变化范围、所述曲度参数、所述区域参数将所述待清除油墨区域划分为至少一个目标区域,以及清除所述至少一个目标区域的油墨的清除顺序;
34、清除模块,用于按照所述清除顺序对所述至少一个目标区域的油墨。
35、一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如上所述方法的步骤。
36、一种加工设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如上所述方法的步骤。
37、采用本发明实施例,具有如下有益效果:
38、基于所述焦距变化范围、所述曲度参数、所述区域参数将所述待清除油墨区域划分为至少一个目标区域,以及获取清除所述至少一个目标区域的油墨的清除顺序;按照所述清除顺序对所述至少一个目标区域的油墨进行清除,能够在振镜的扫描位置不发生变动的情况下通过将待清除油墨区域分为多个目标区域进行清理,结合曲面透明基材在三维方向上运动实现油墨的完全清除,能够有效提升油墨的清洁效果和清洁效率。
技术特征:
1.一种去除透明基材表面油墨的方法,其特征在于,应用于油墨去除设备,所述油墨去除设备包括:
2.根据权利要求1所述的去除透明基材表面油墨的方法,其特征在于,所述基于所述照射范围、所述焦距变化范围、所述曲度参数、所述区域参数将所述待清除油墨区域划分为至少一个目标区域的步骤,包括:
3.根据权利要求1所述的去除透明基材表面油墨的方法,其特征在于,所述按照所述清除顺序对所述至少一个目标区域的油墨进行清除的步骤,包括:
4.根据权利要求1所述的去除透明基材表面油墨的方法,其特征在于,所述基于所述照射范围、所述焦距变化范围、所述曲度参数、所述区域参数将所述待清除油墨区域划分为至少一个目标区域的步骤,包括:
5.根据权利要求4所述的去除透明基材表面油墨的方法,其特征在于,所述基于所述照射范围、所述焦距变化范围、所述曲度参数、所述区域参数将所述待清除油墨区域划分为至少一个目标区域的步骤,包括:
6.根据权利要求5所述的去除透明基材表面油墨的方法,其特征在于,所述判断所述初始区域中的加工点根据预设规划是否属于所述初始区域的步骤之后,包括:
7.根据权利要求1所述的去除透明基材表面油墨的方法,其特征在于,所述油墨去除设备还包括:
8.一种去除透明基材表面油墨的系统,其特征在于,应用于油墨去除设备,所述油墨去除设备包括:
9.一种计算机可读存储介质,存储有计算机程序,所述计算机程序被处理器执行时,使得所述处理器执行如权利要求1至7中任一项所述方法的步骤。
10.一种加工设备,包括存储器和处理器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,使得所述处理器执行如权利要求1至7中任一项所述方法的步骤。
技术总结
本发明公开了去除透明基材表面油墨的方法、系统、设备和存储介质。该方法应用于油墨去除设备,油墨去除设备包括:激光源,用于提供激光,激光用于去除曲面透明基材表面的油墨;振镜,用于将激光射至曲面透明基材表面,以清除油墨;多轴机器人,用于带动曲面透明基材在三维方向上运动;去除曲面透明基材表面油墨的方法包括如下步骤:获取曲面透明基材的曲度参数,以及曲面透明基材上待清除油墨区域的区域参数;基于焦距变化范围、曲度参数、区域参数将待清除油墨区域划分为至少一个目标区域,以及获取清除至少一个目标区域的油墨的清除顺序;按照清除顺序对至少一个目标区域的油墨进行清除。本发明能够提升清除油墨的效果和效率。
技术研发人员:朱建,袁剑,黎锦宁,李善基
受保护的技术使用者:深圳铭创智能装备有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!